Meet the drones taking delivery to new heights.
Meet the drones taking delivery to new heights.
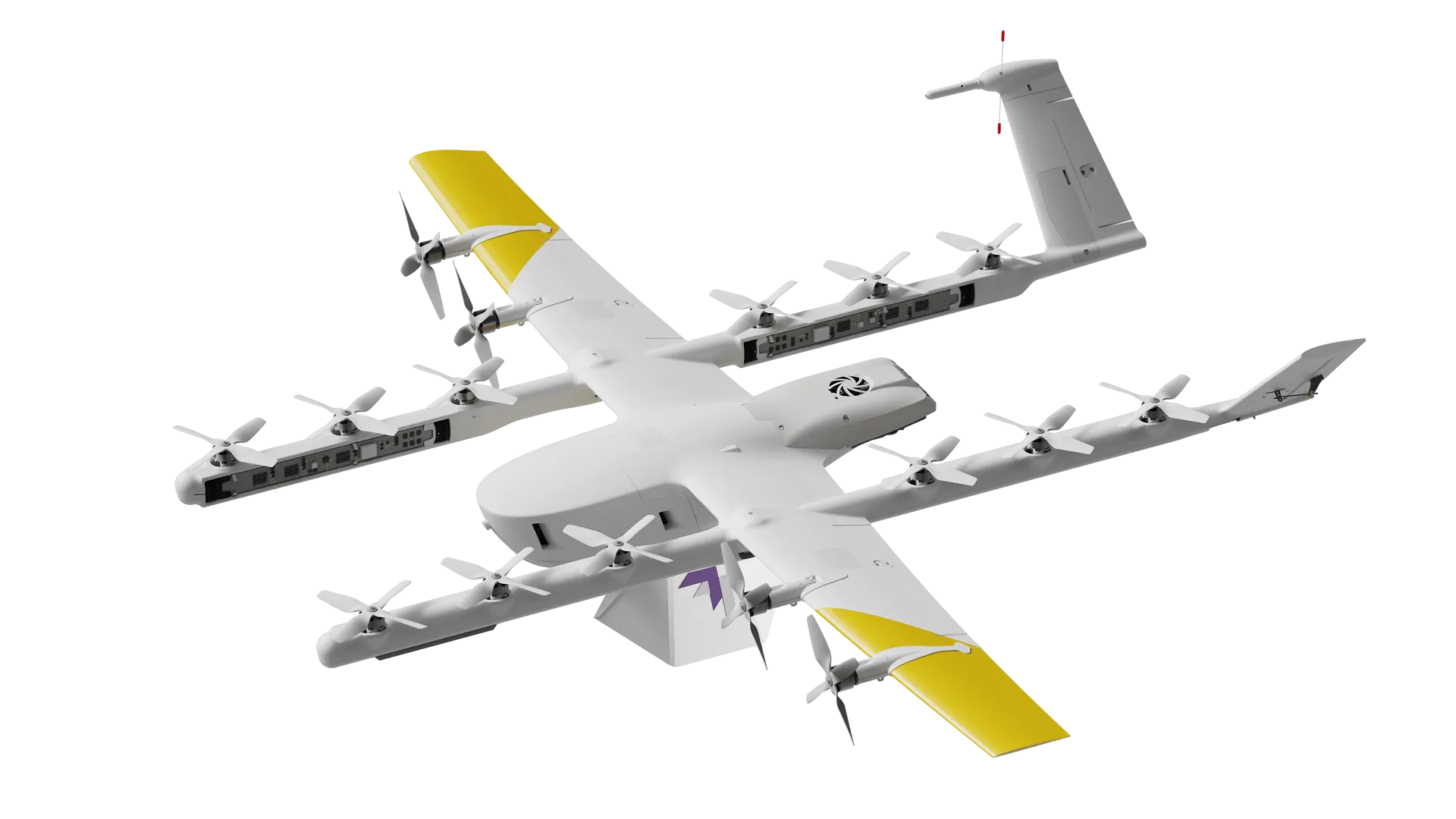
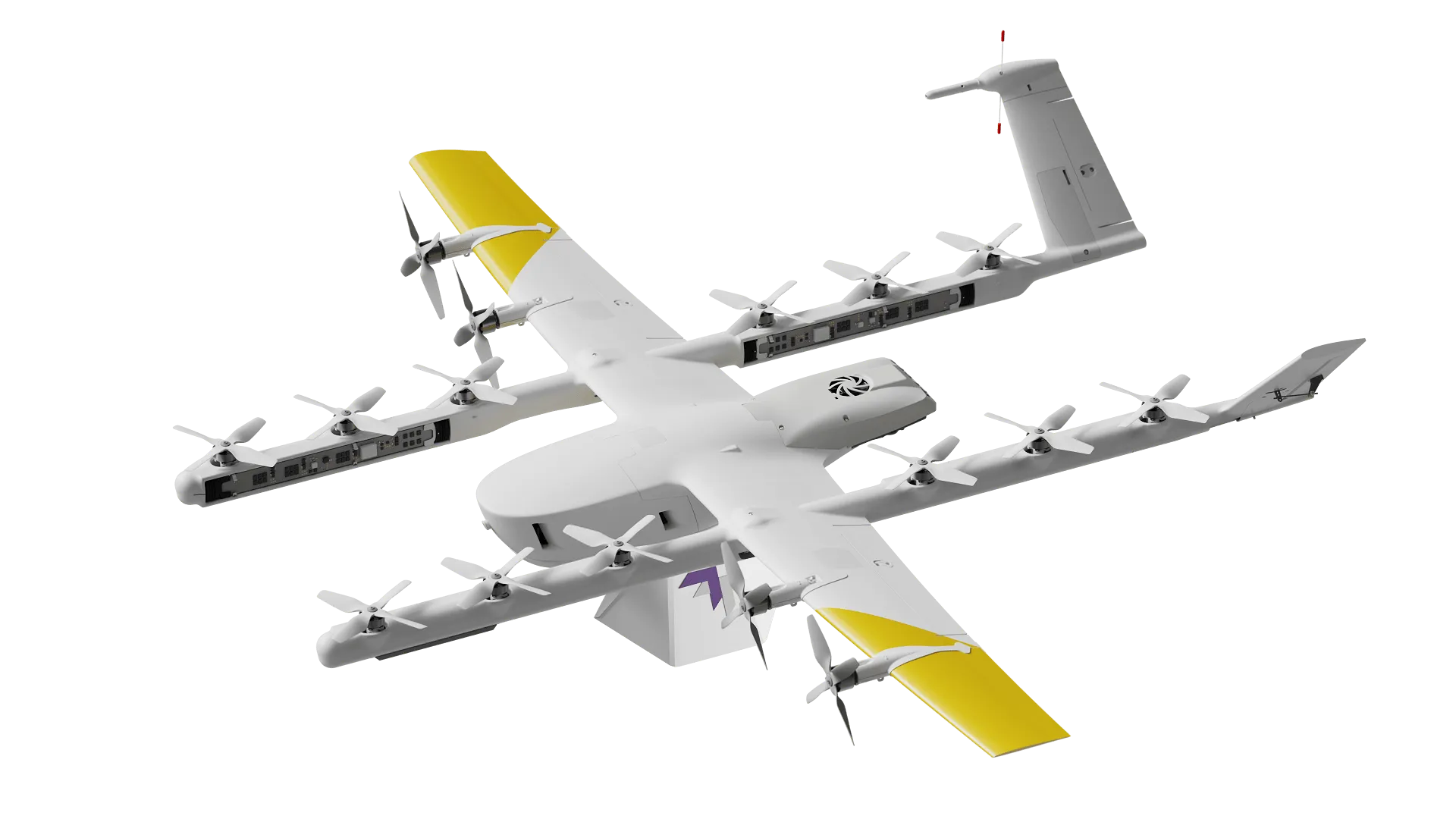
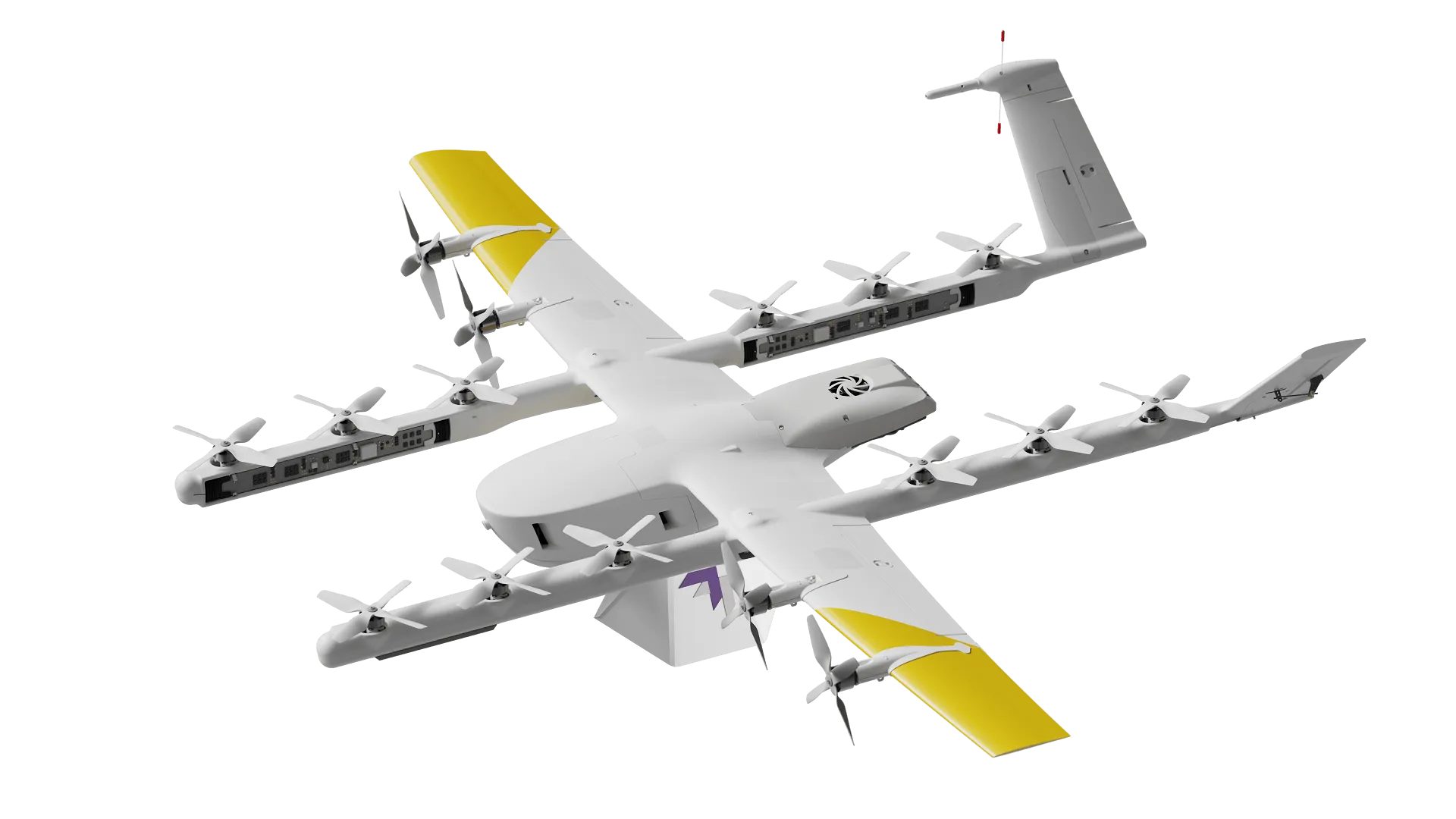
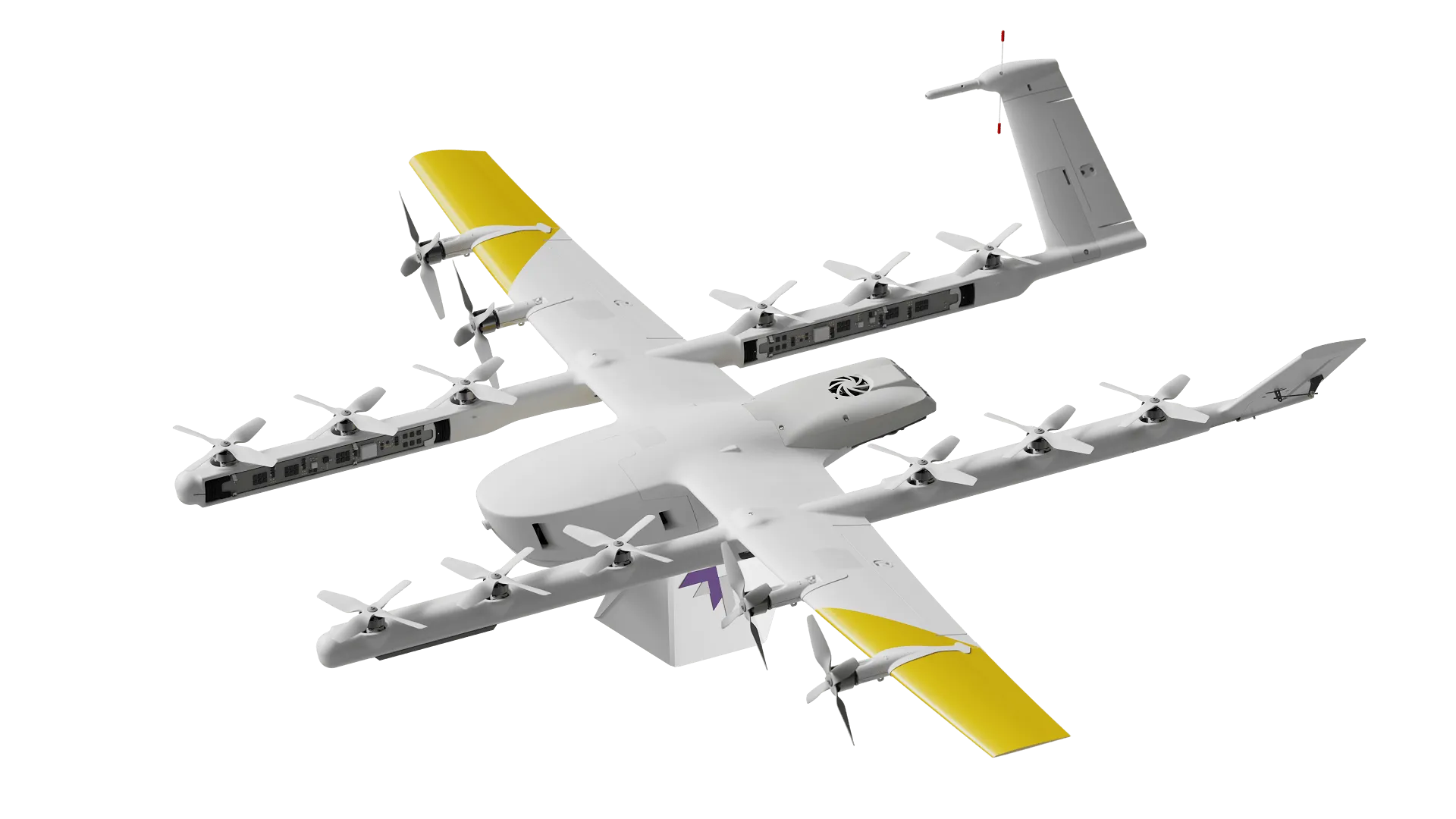
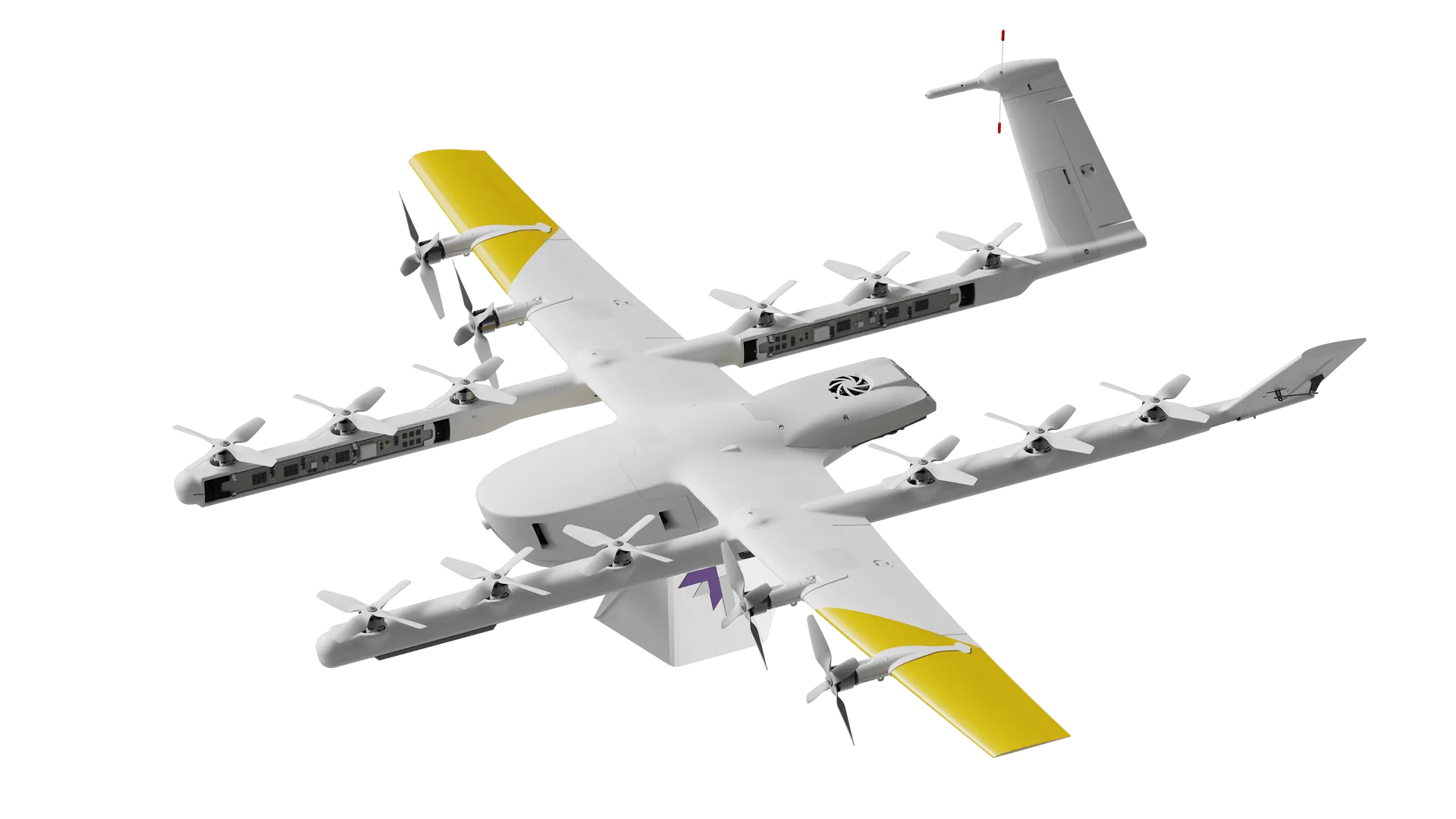
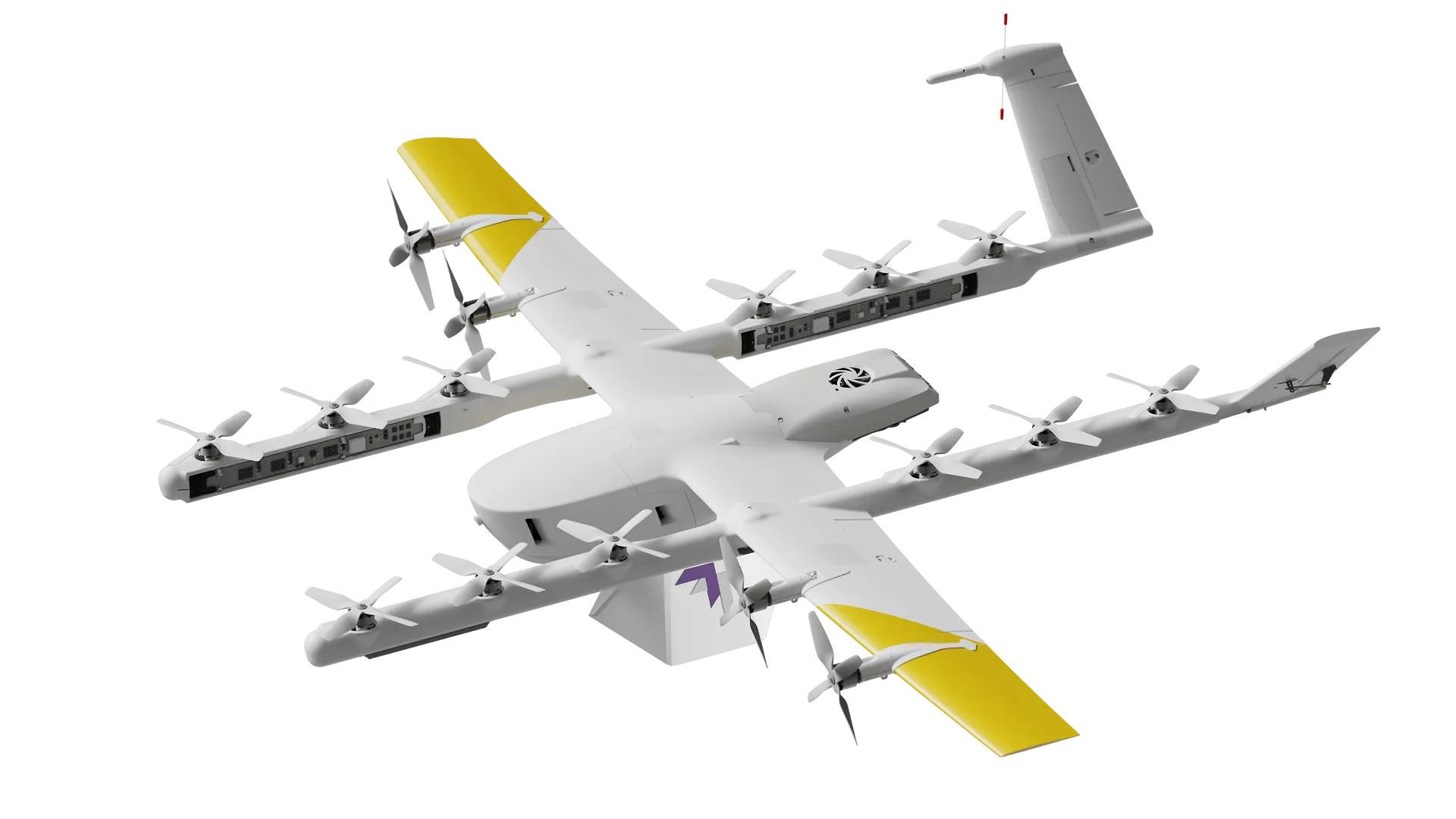
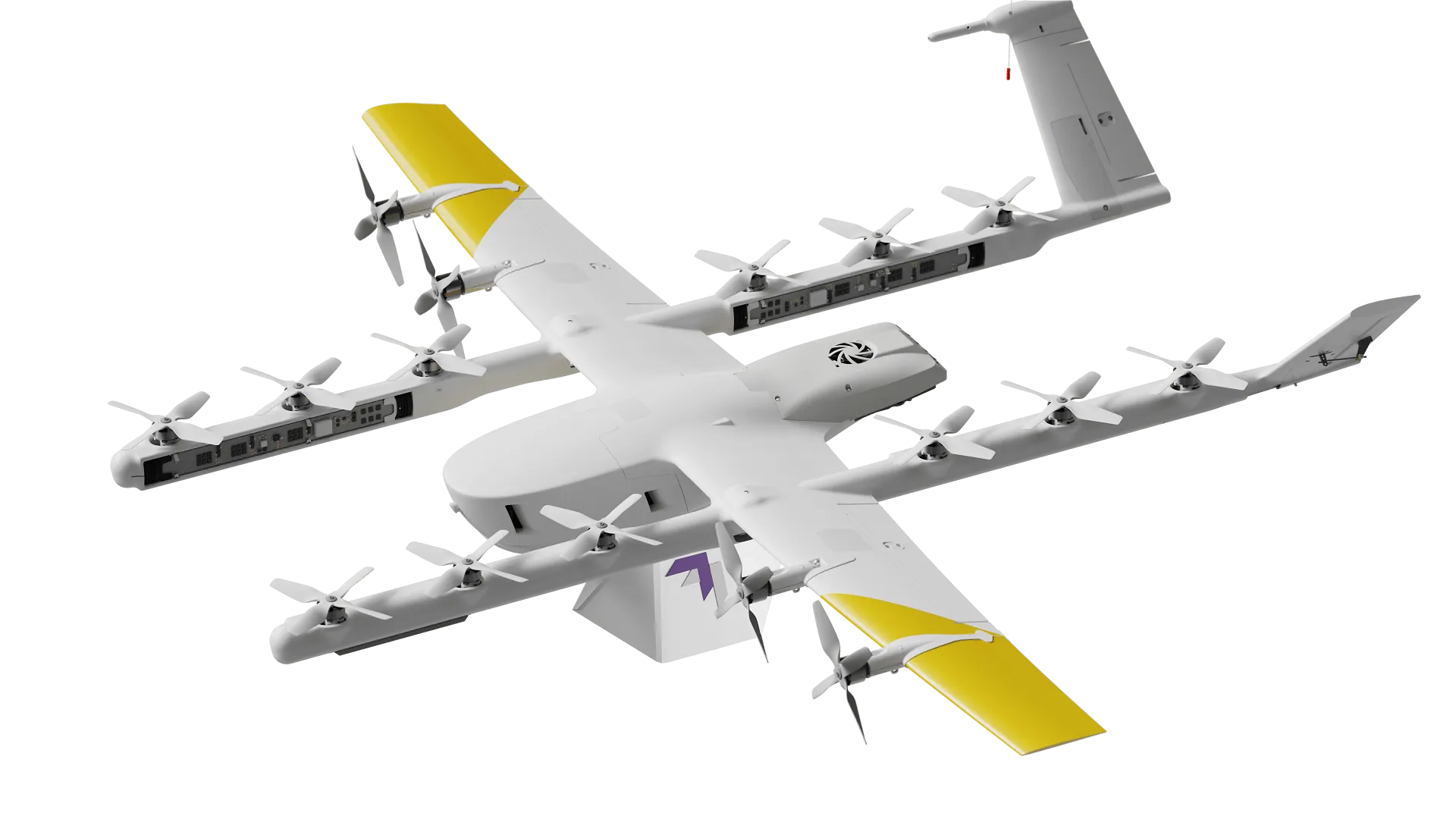
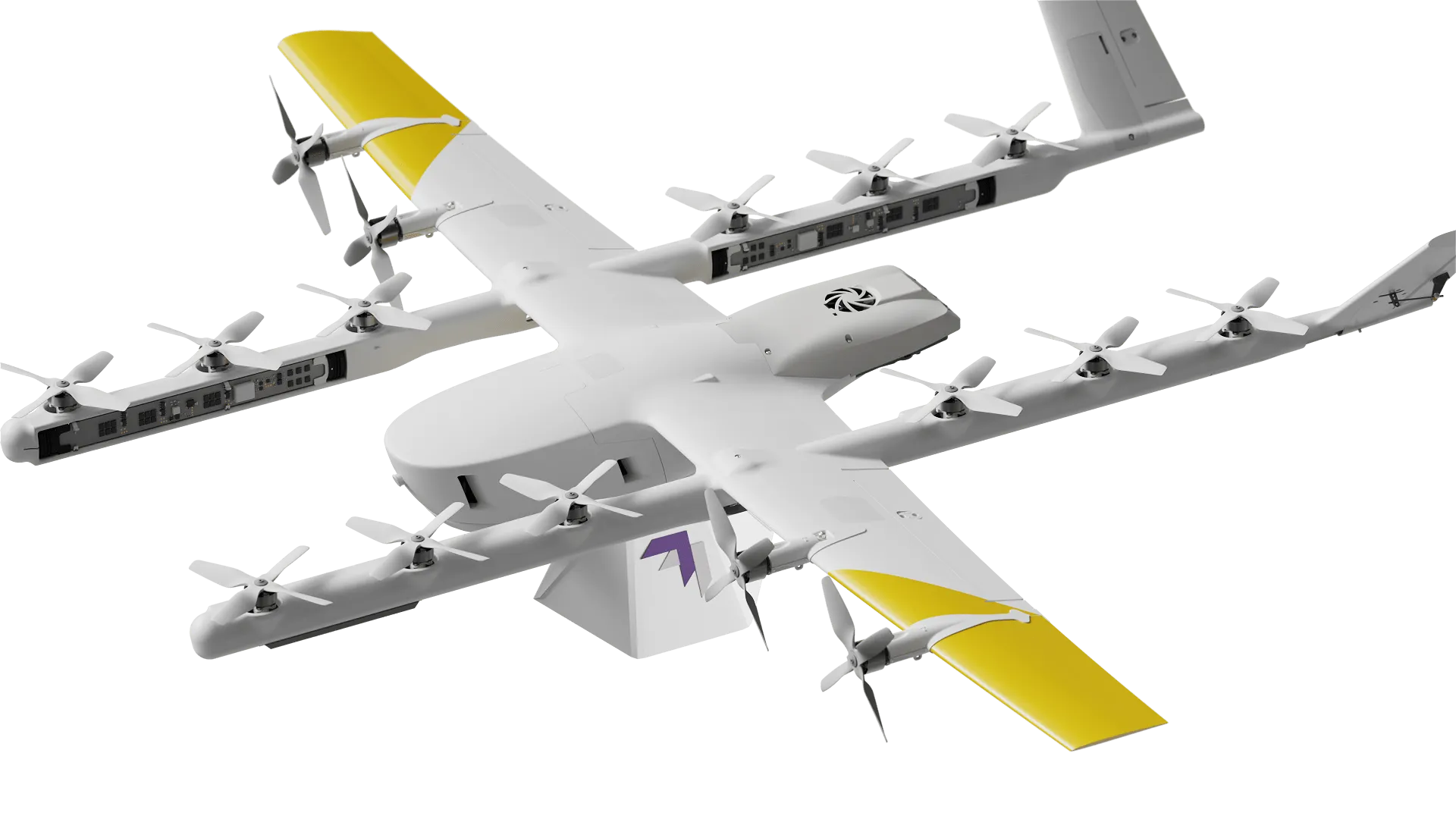
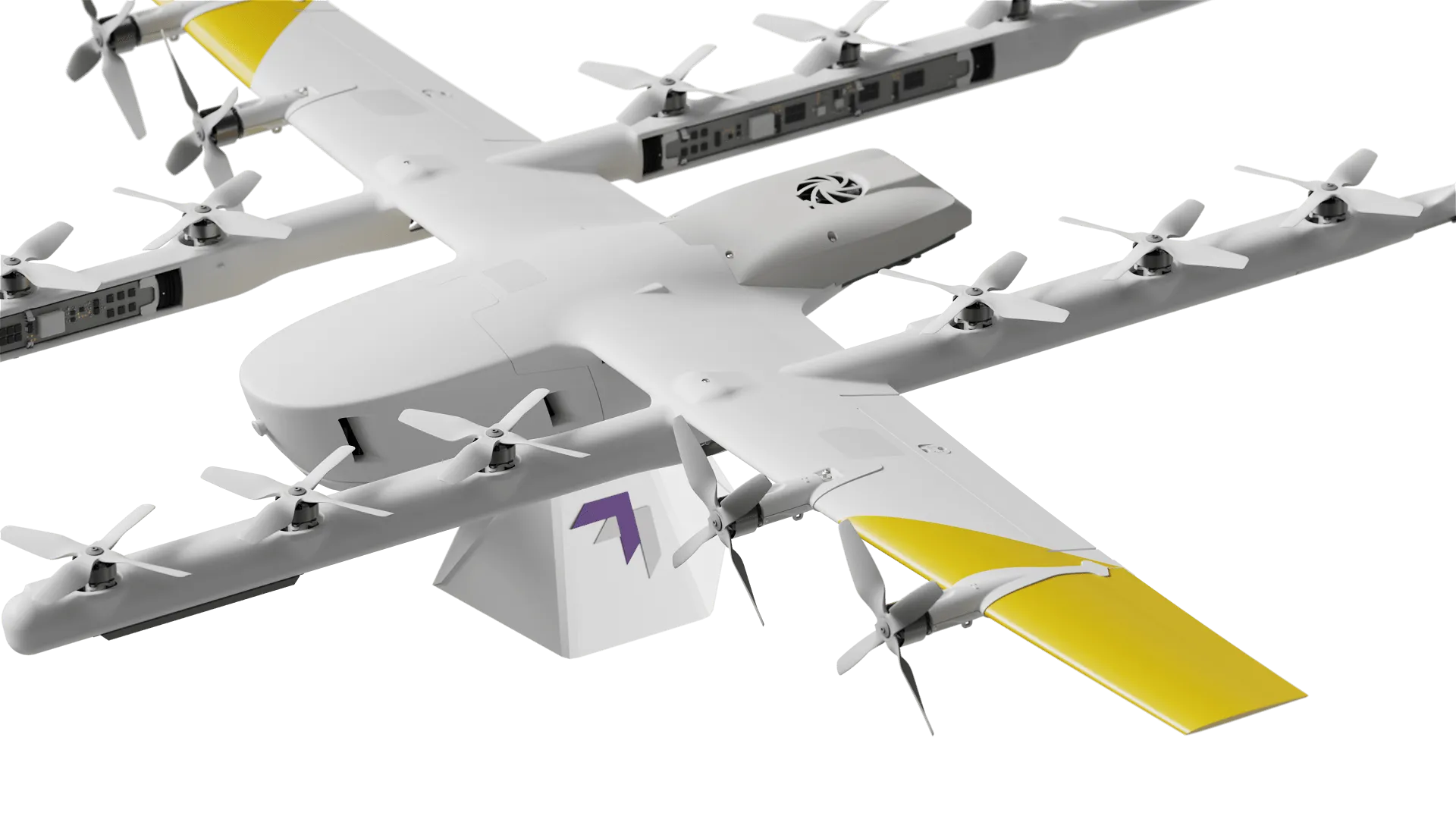
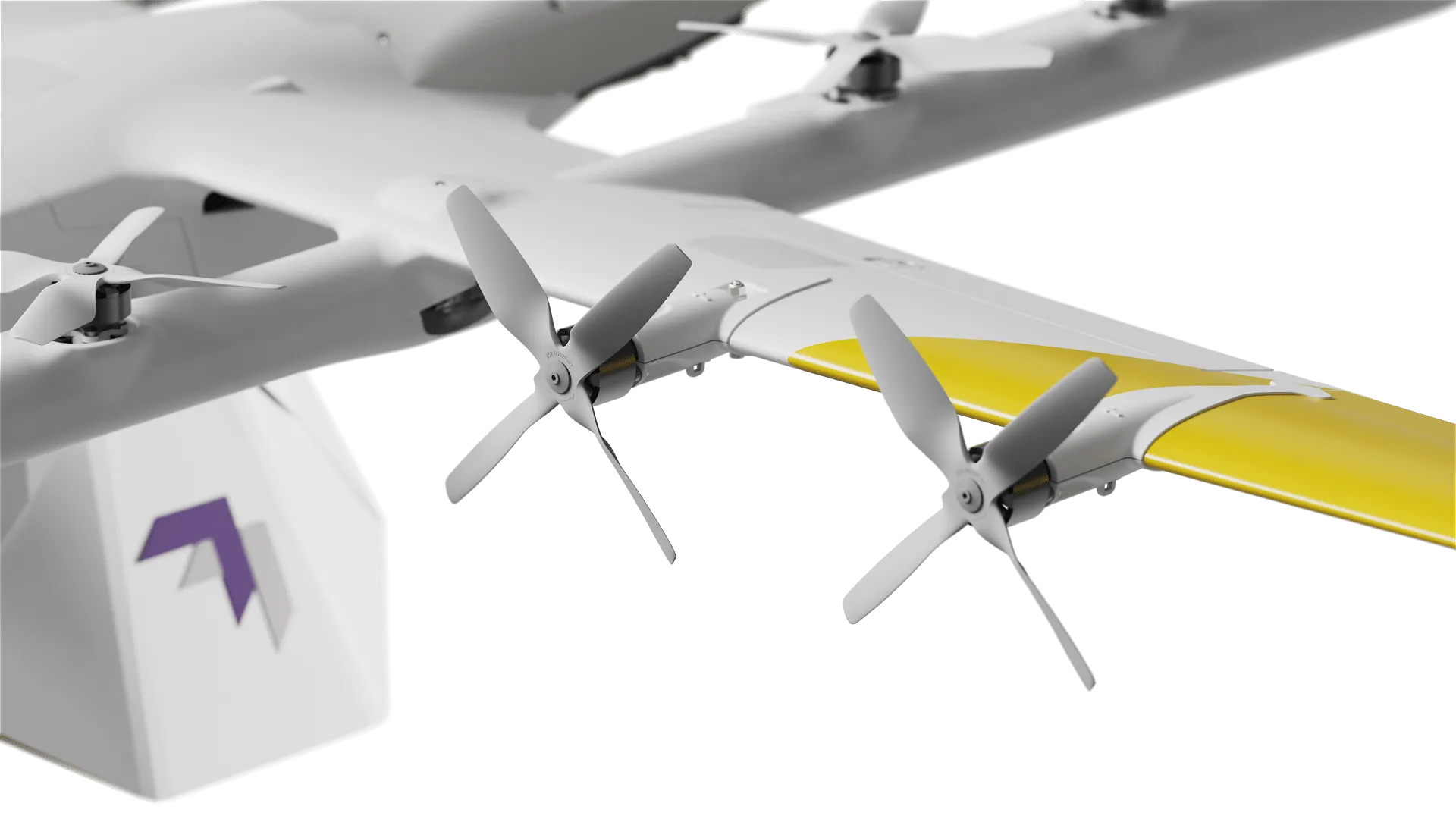
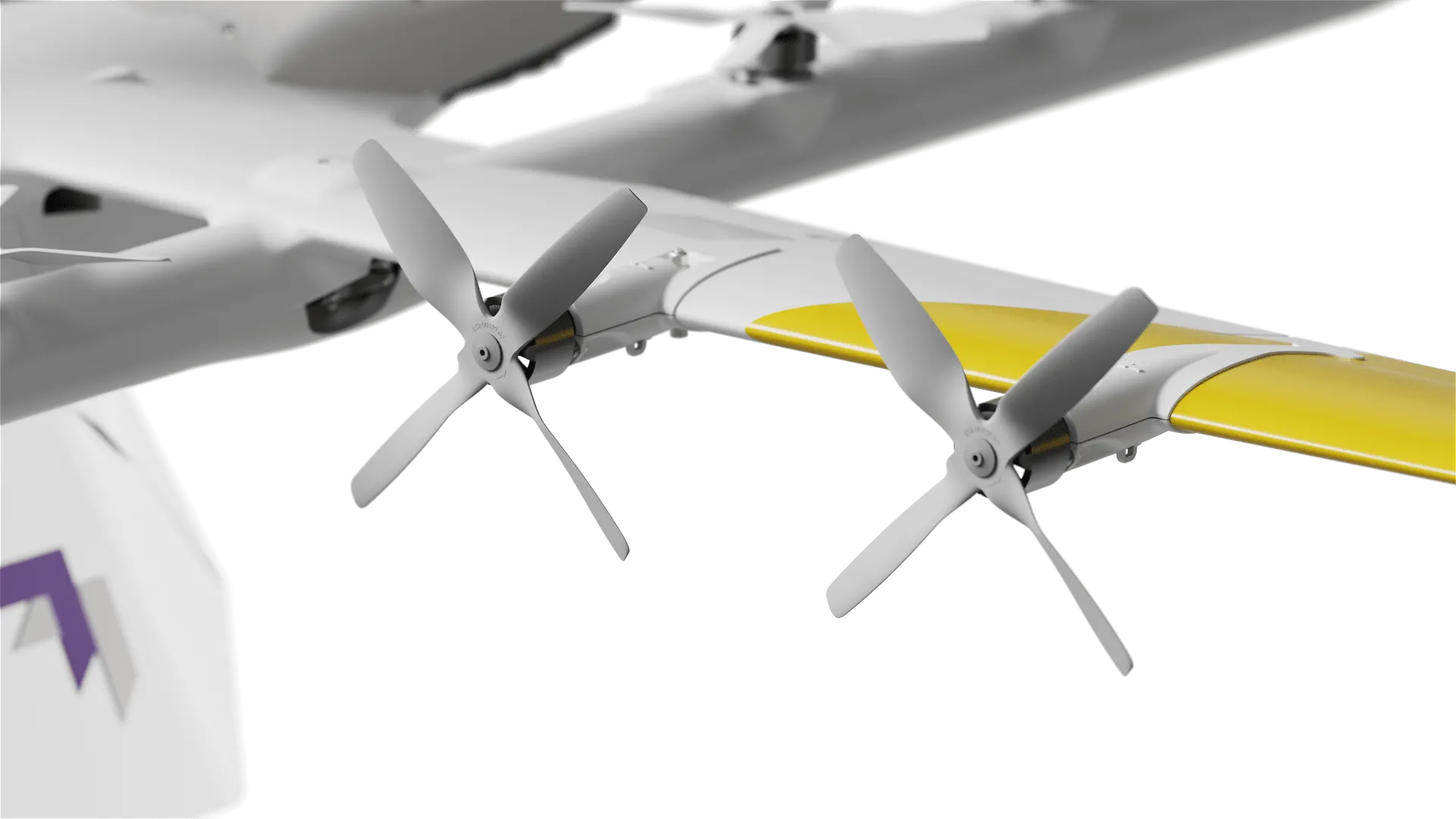
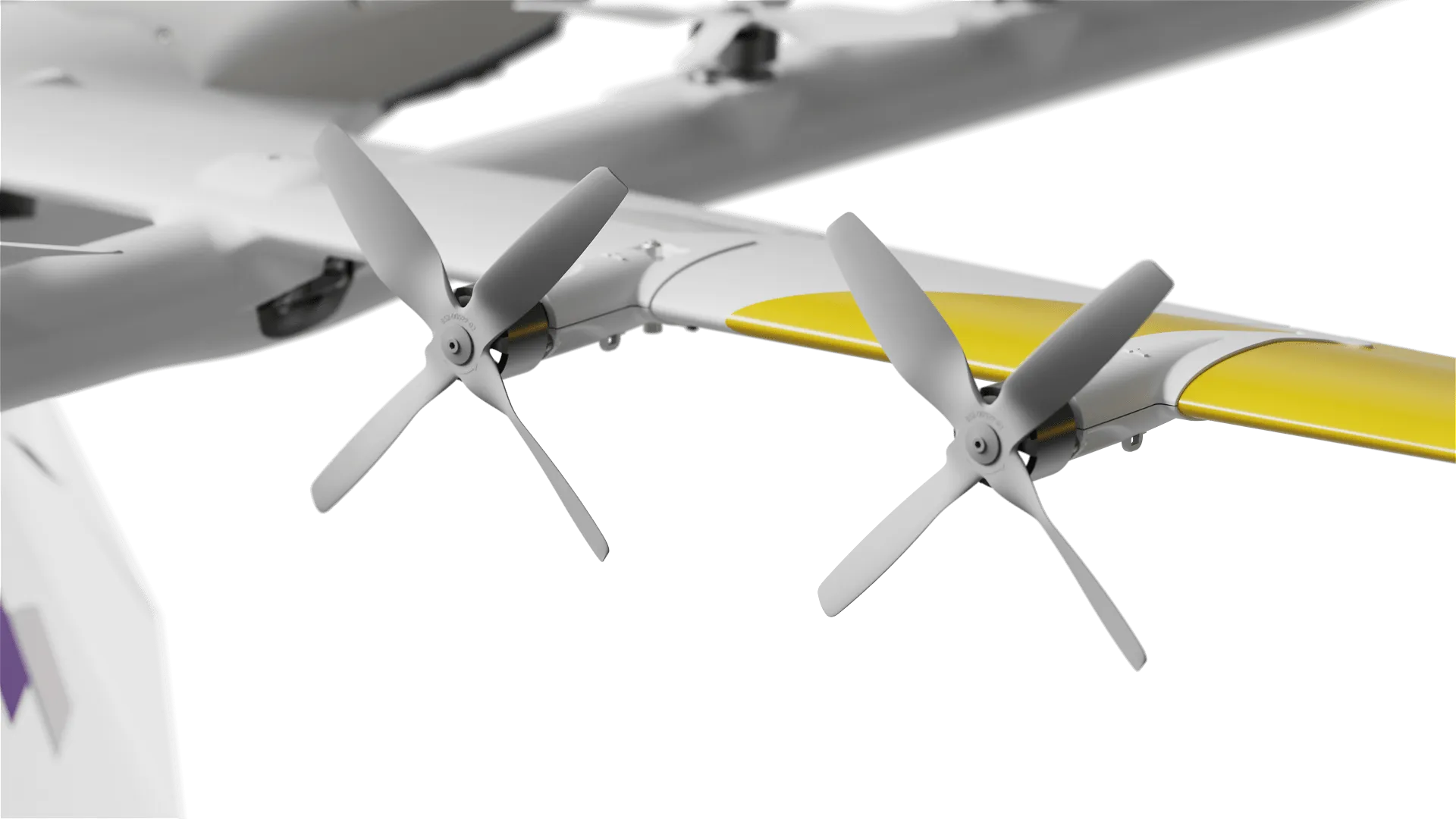
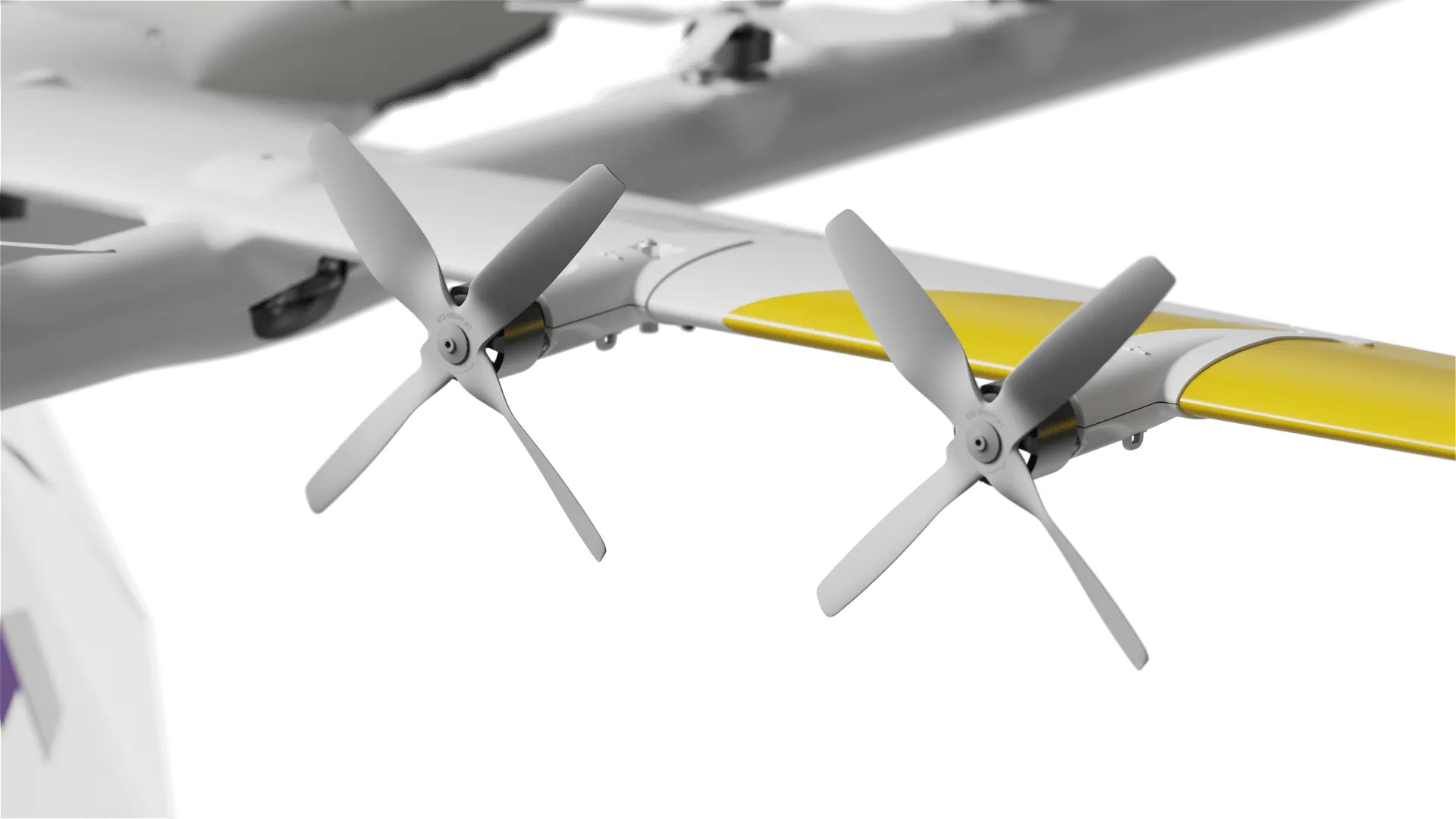
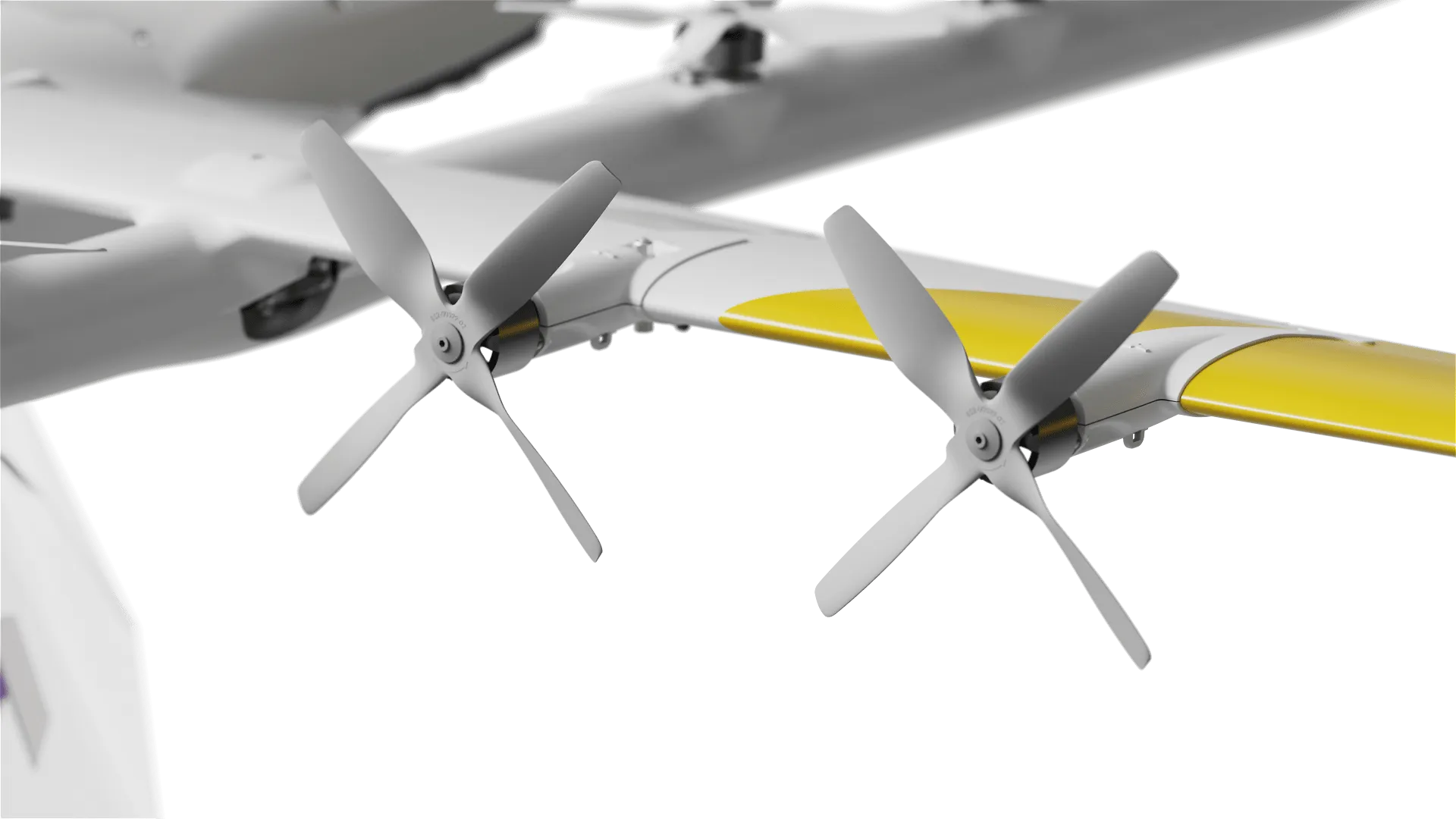
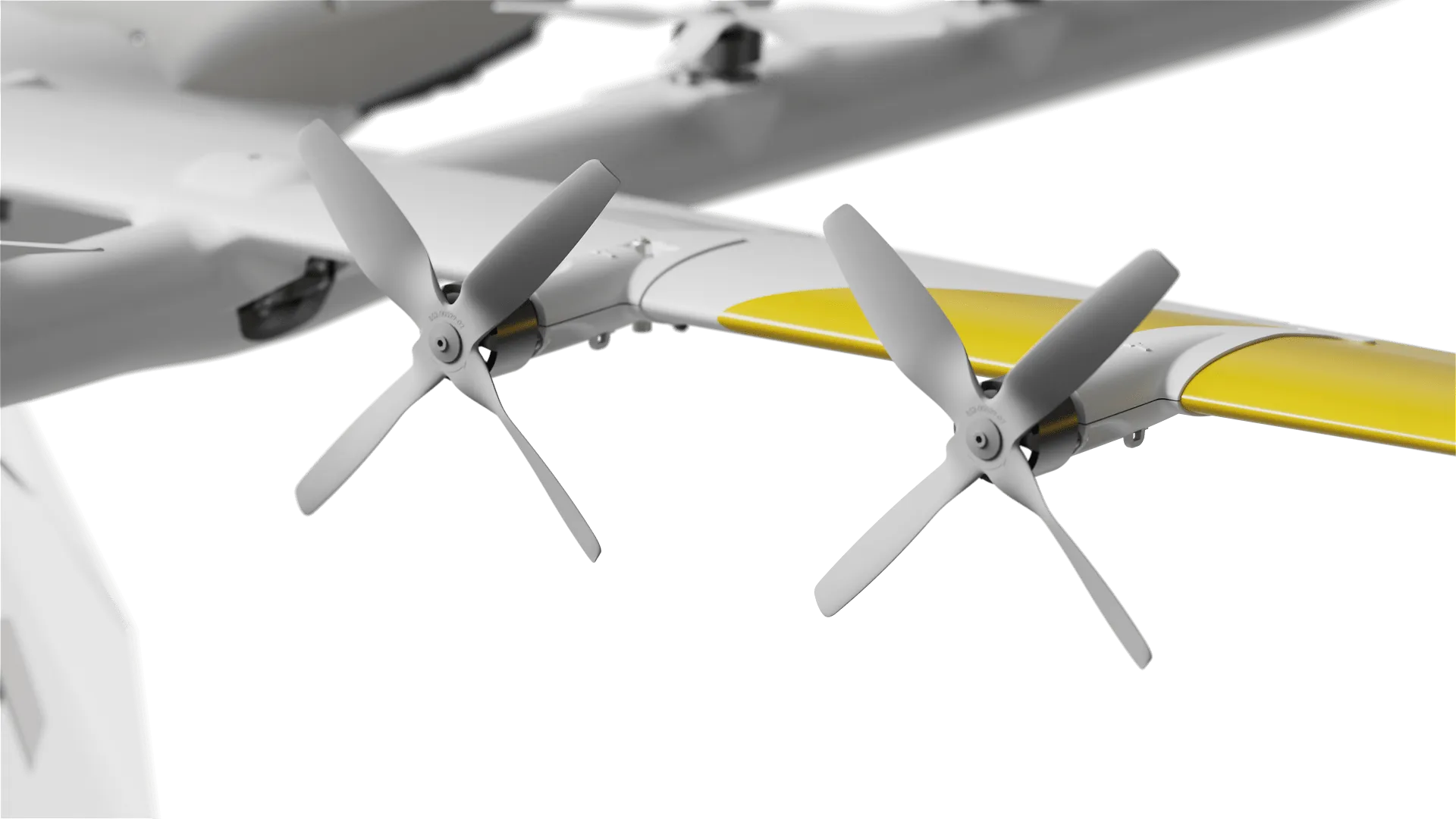
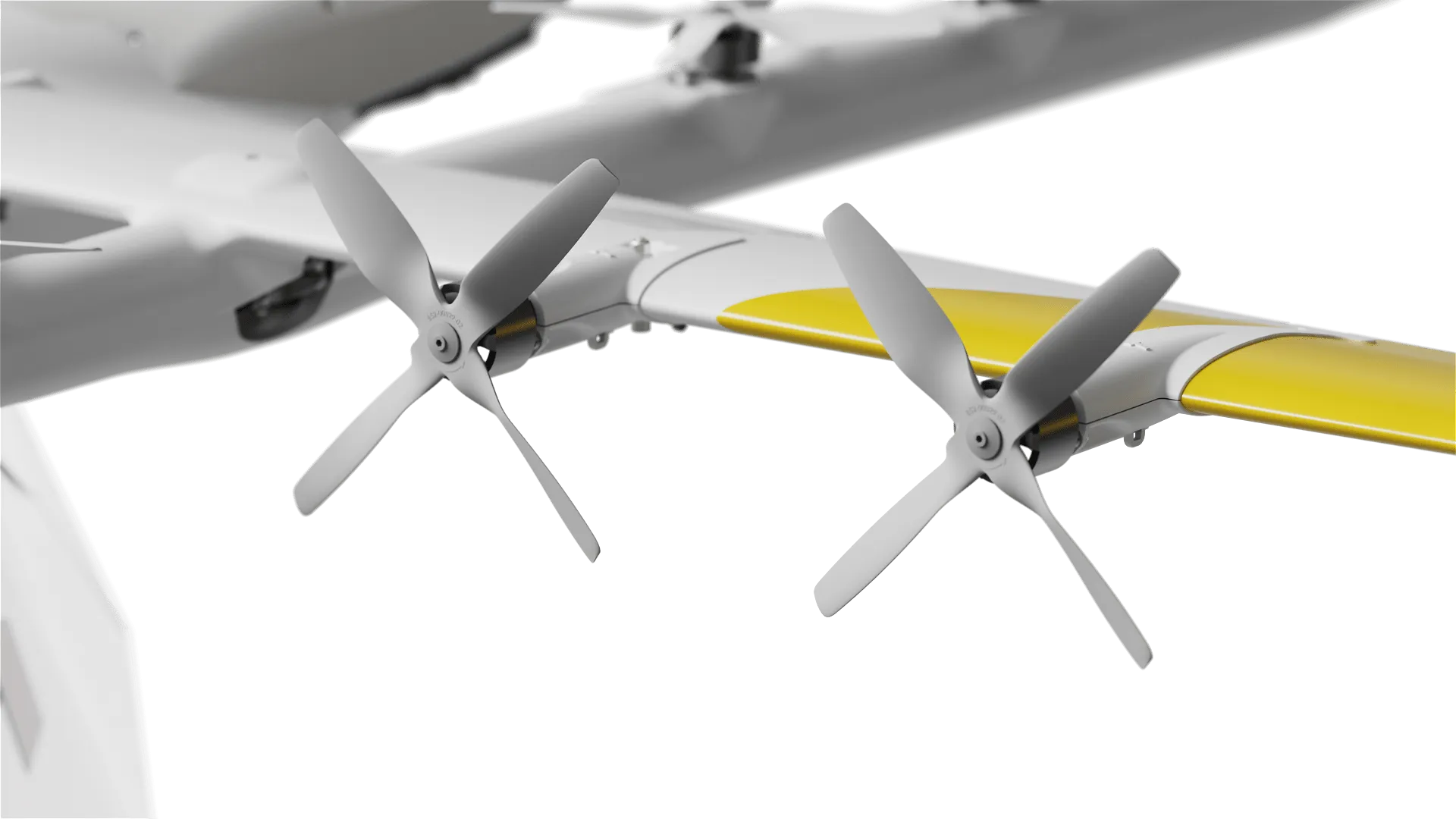
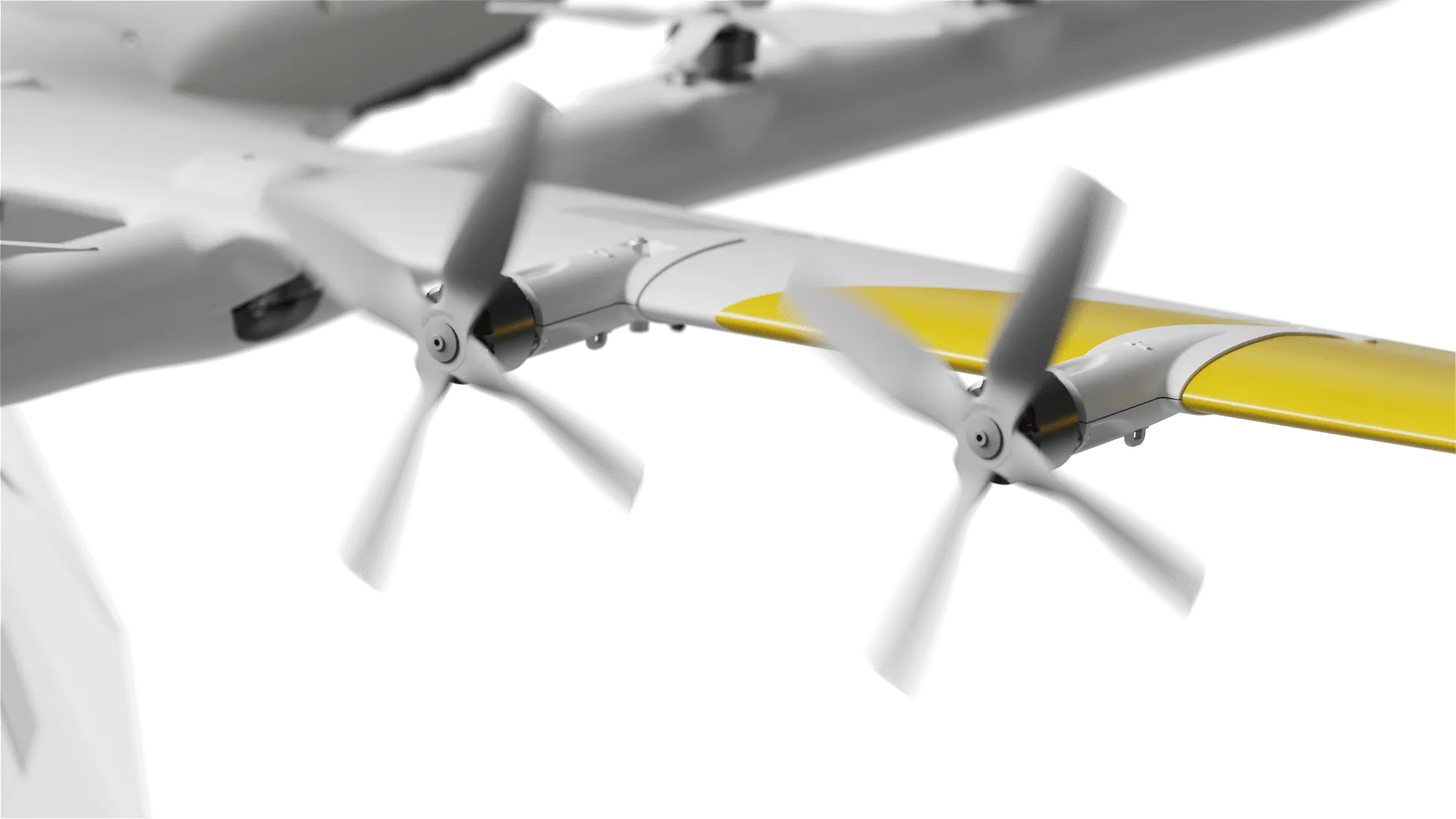
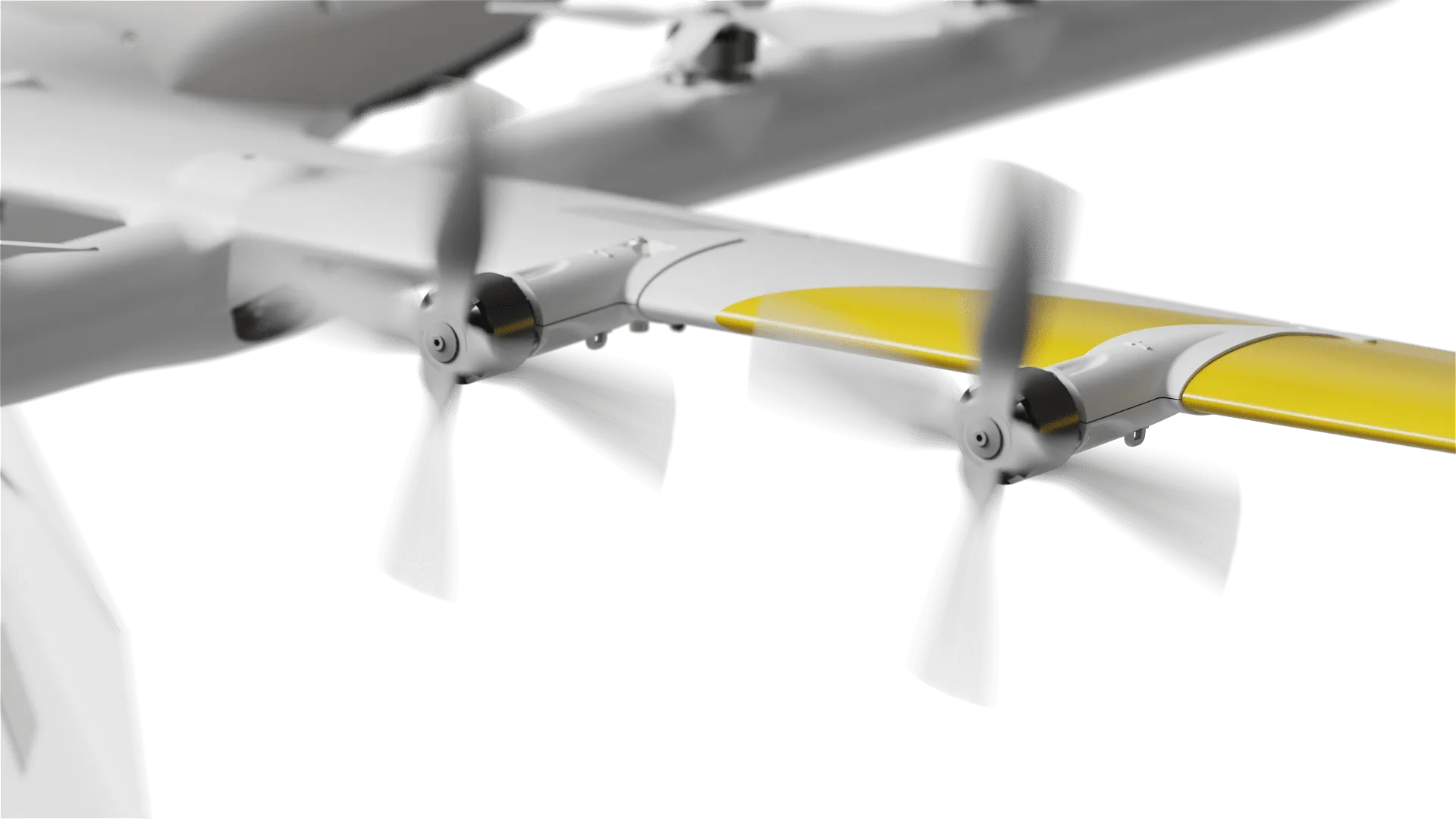
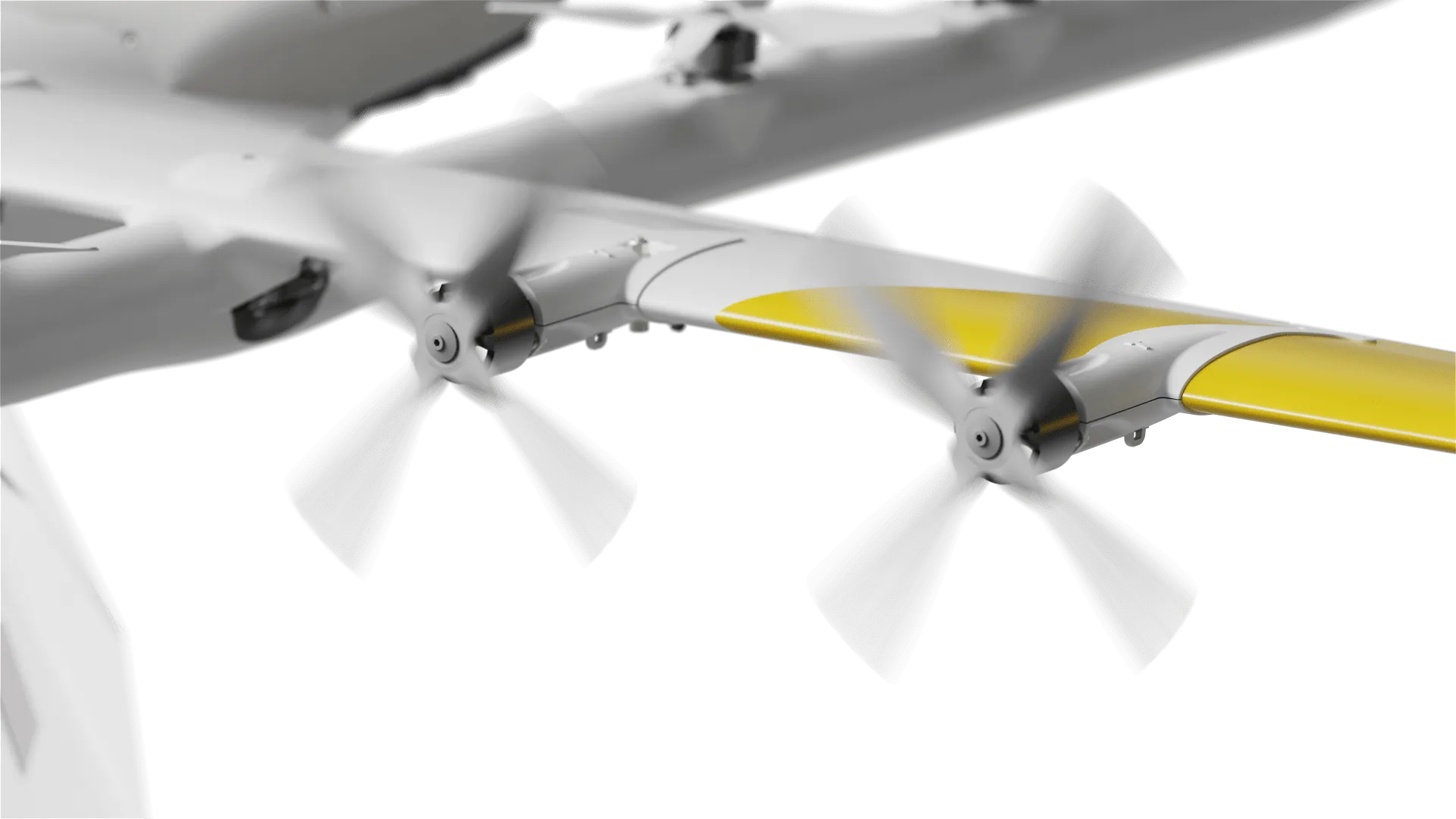
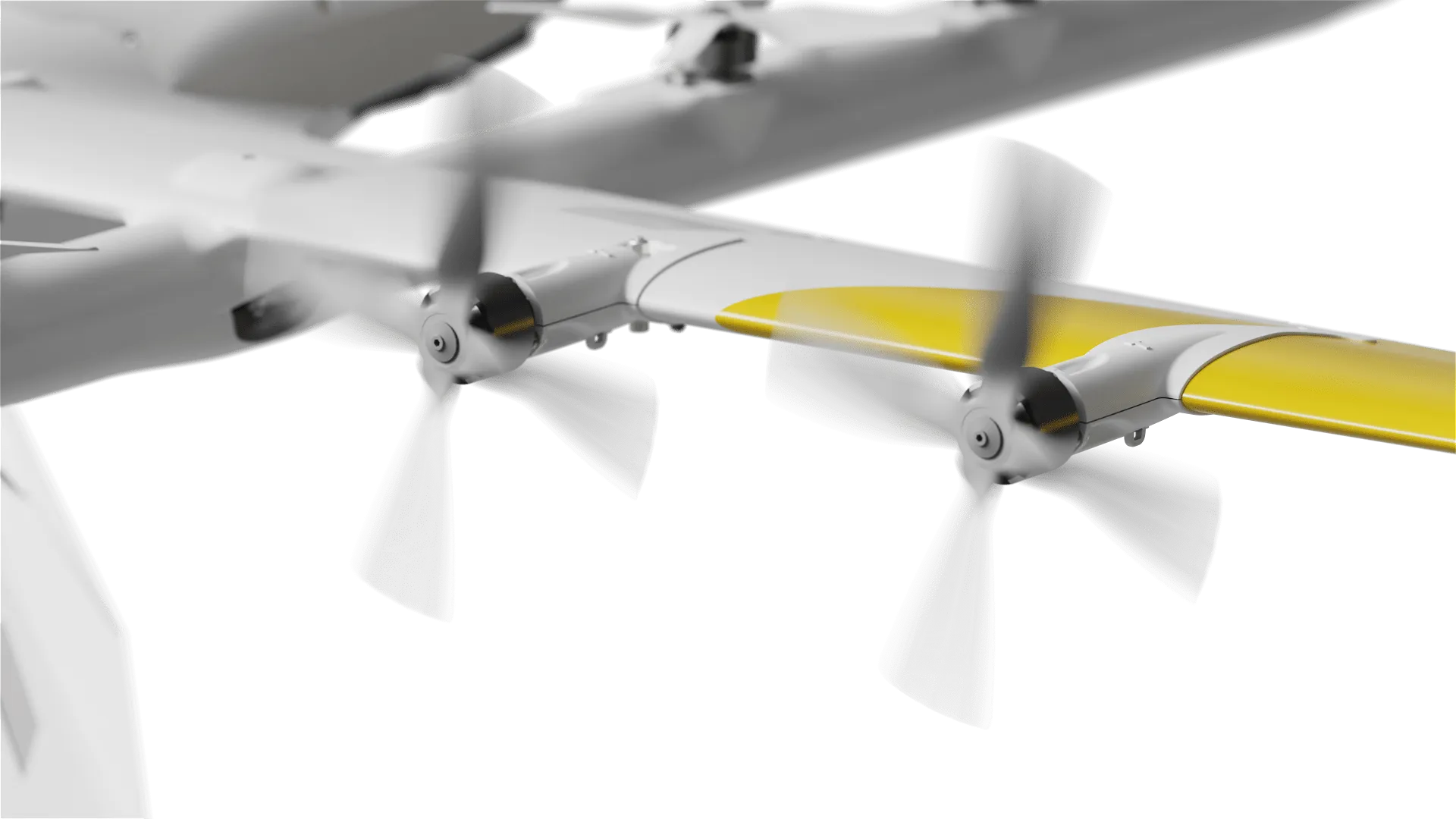
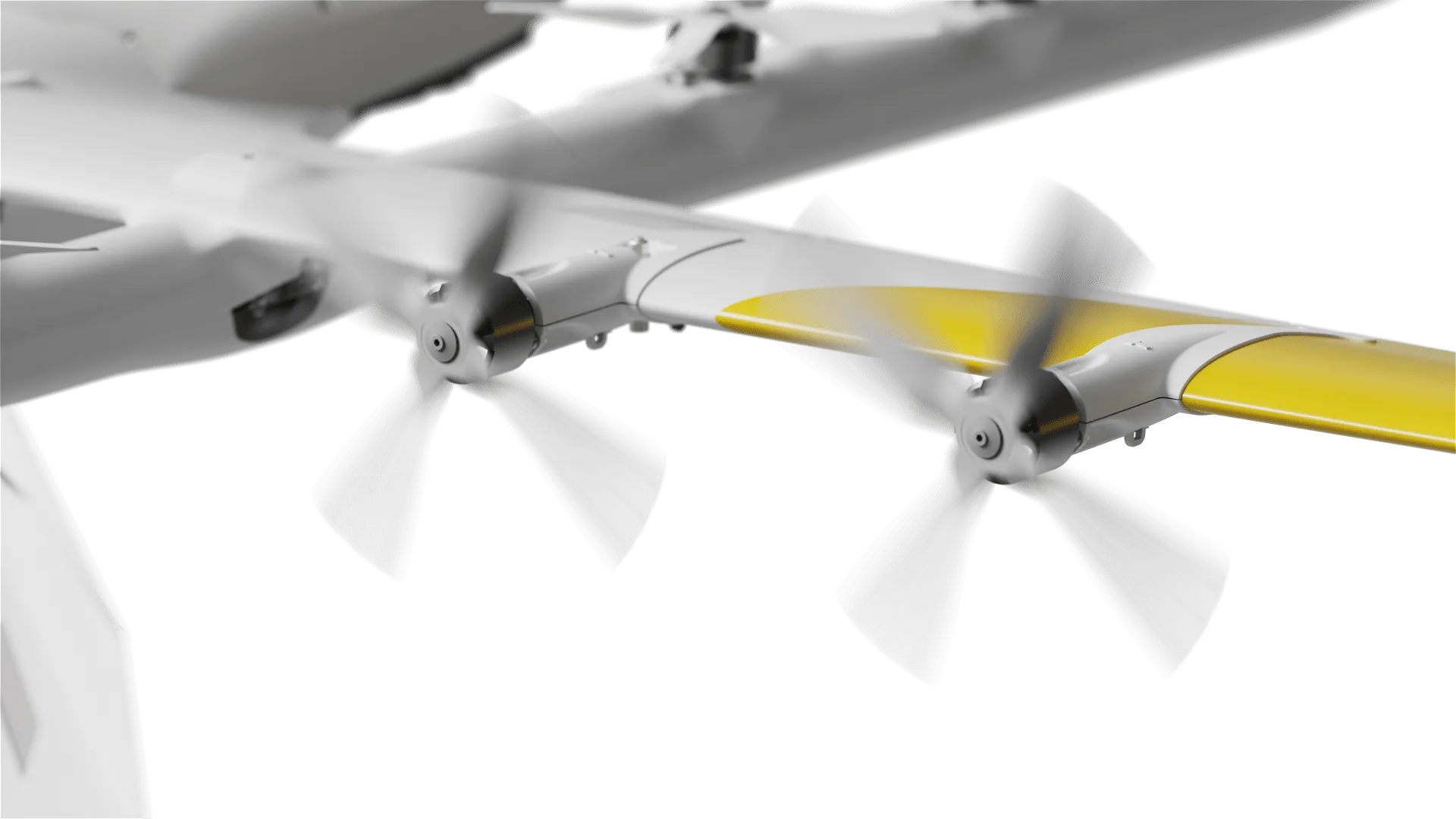
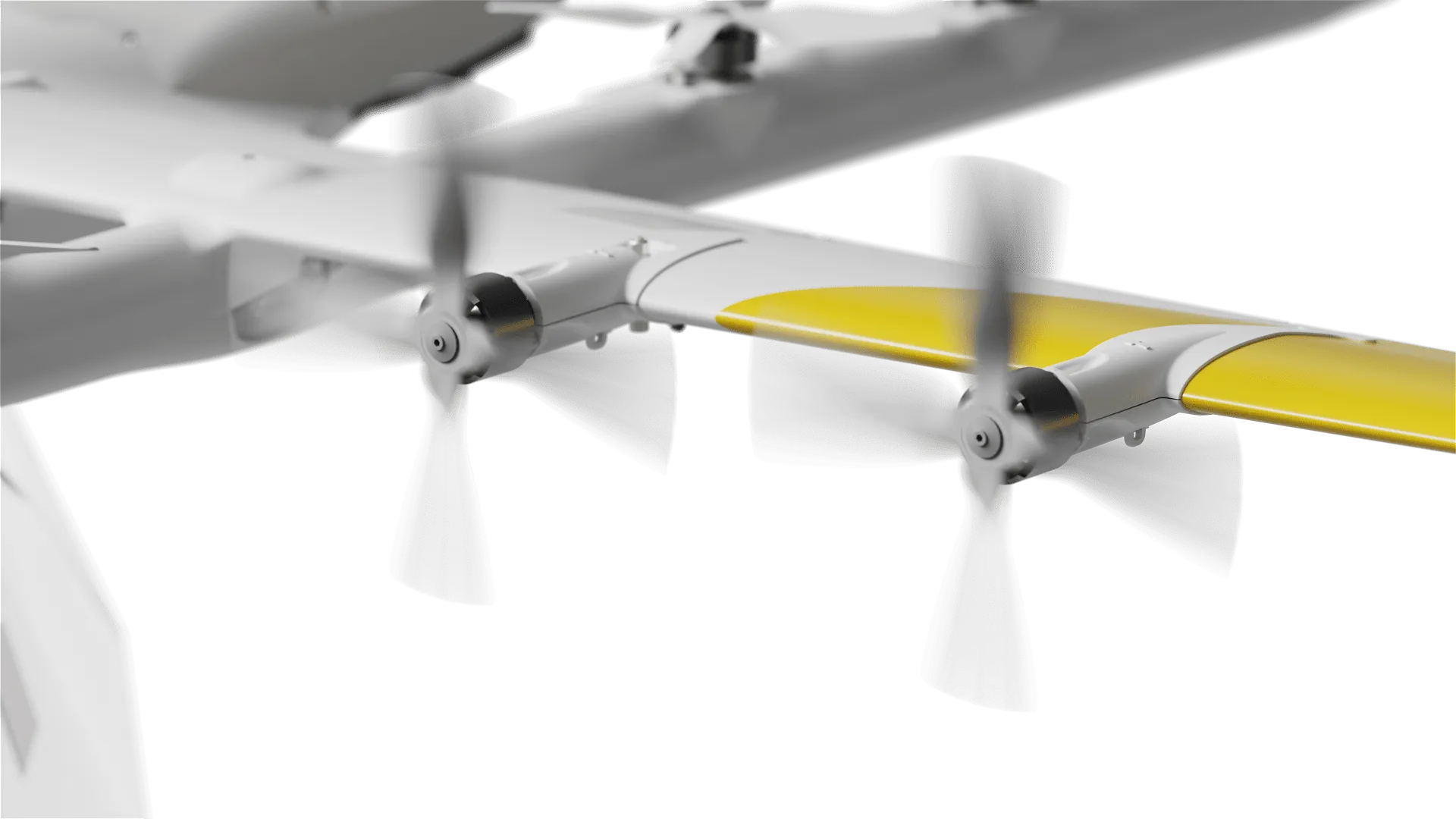
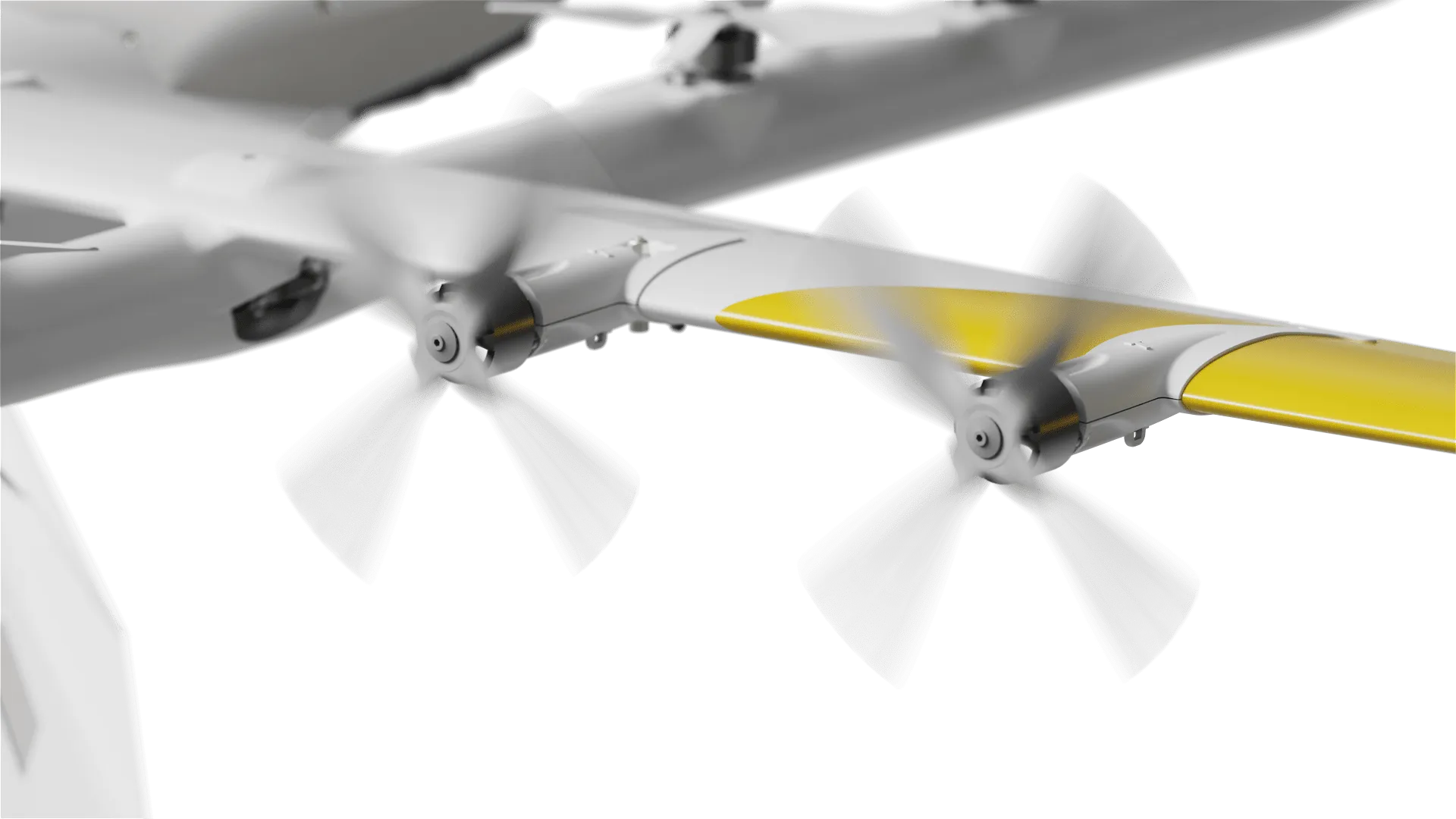
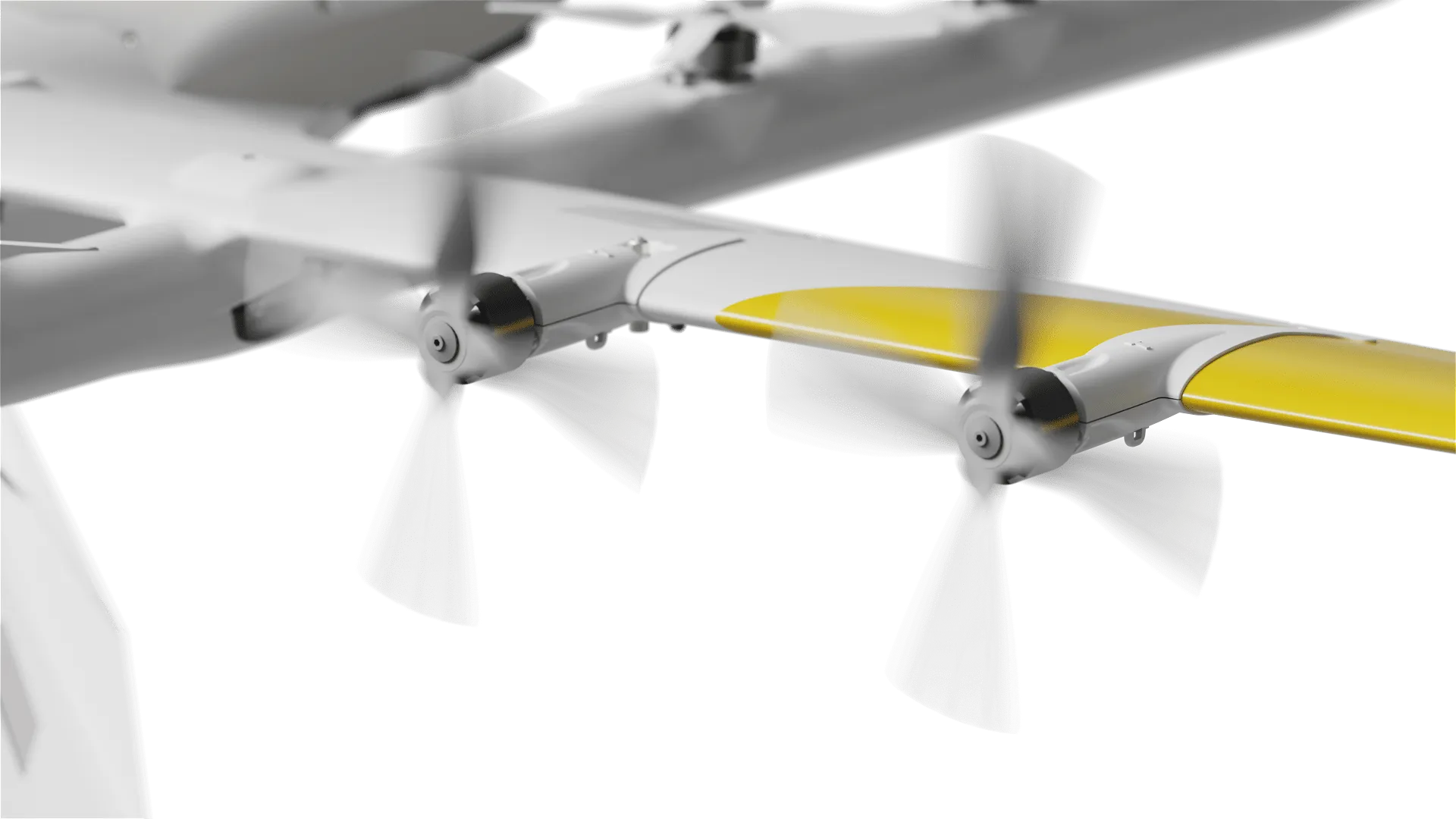
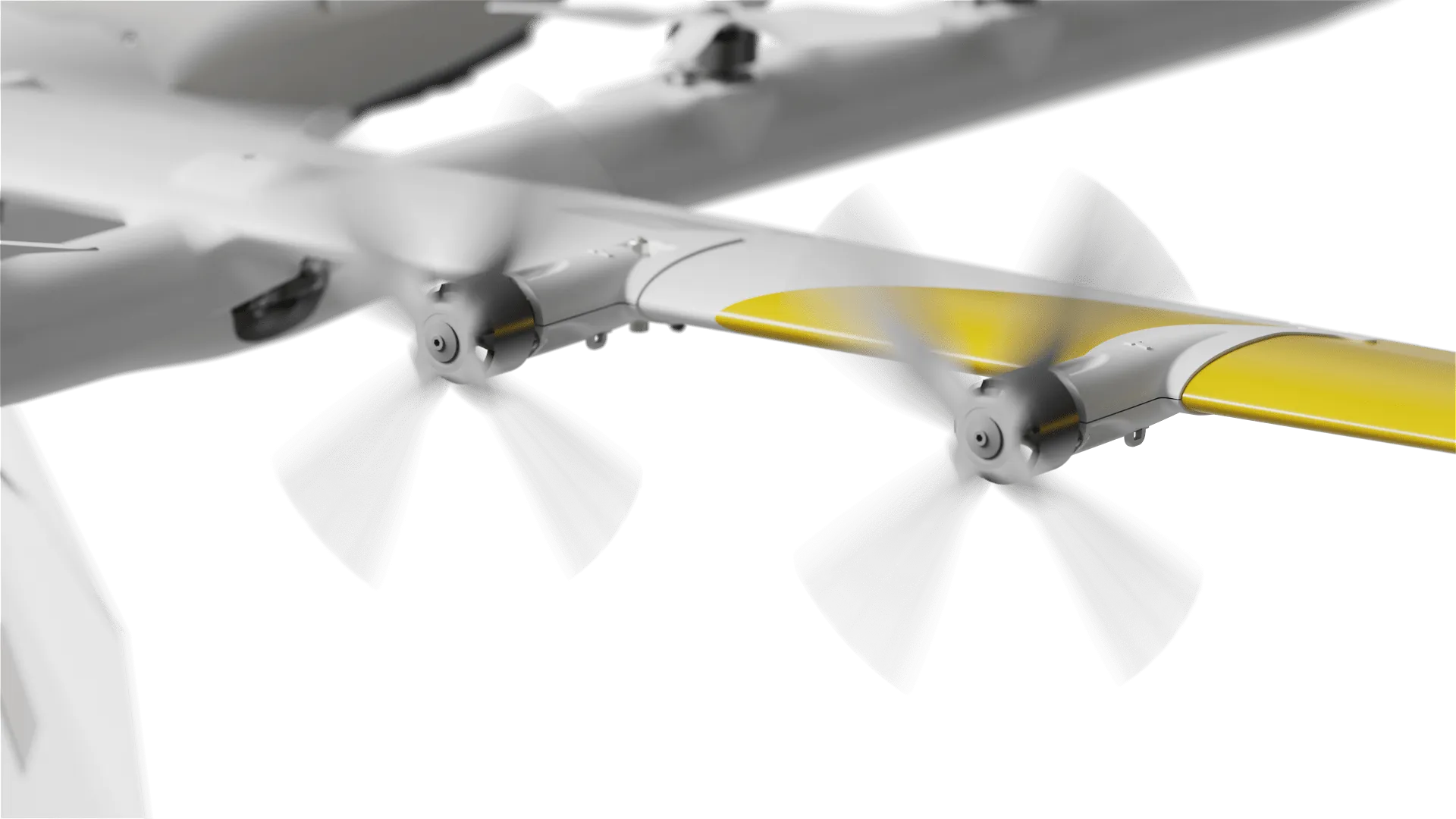
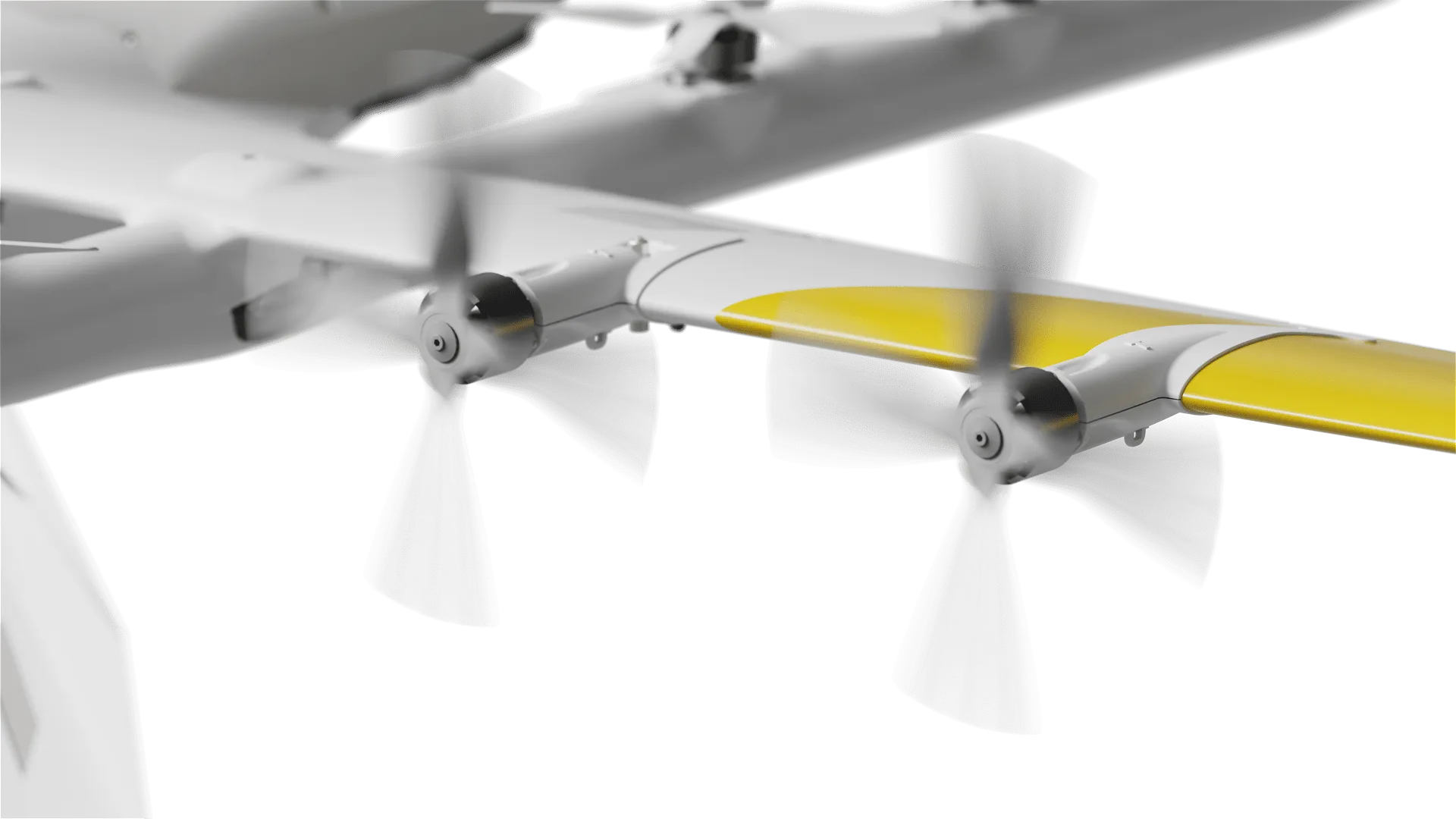
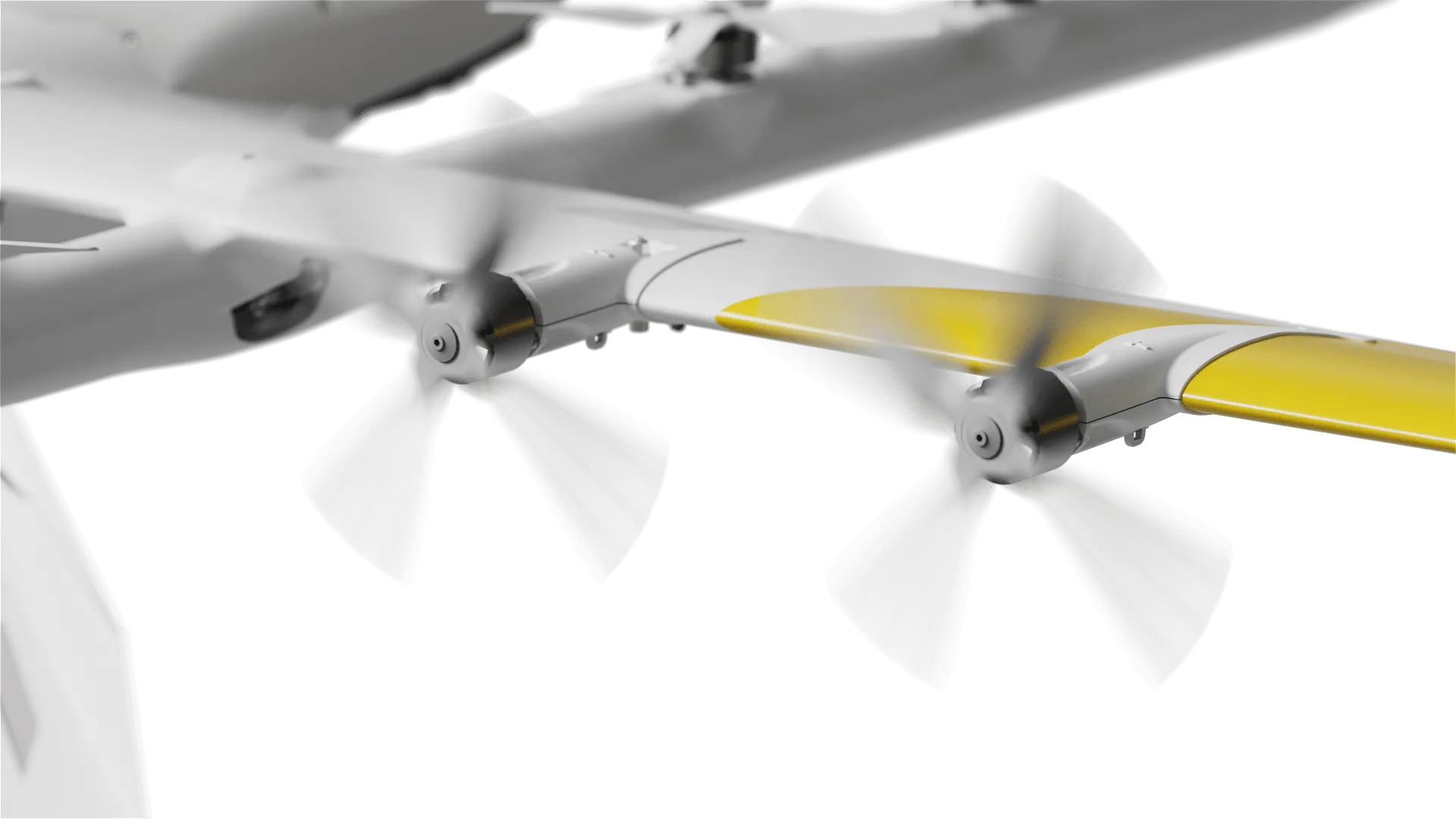
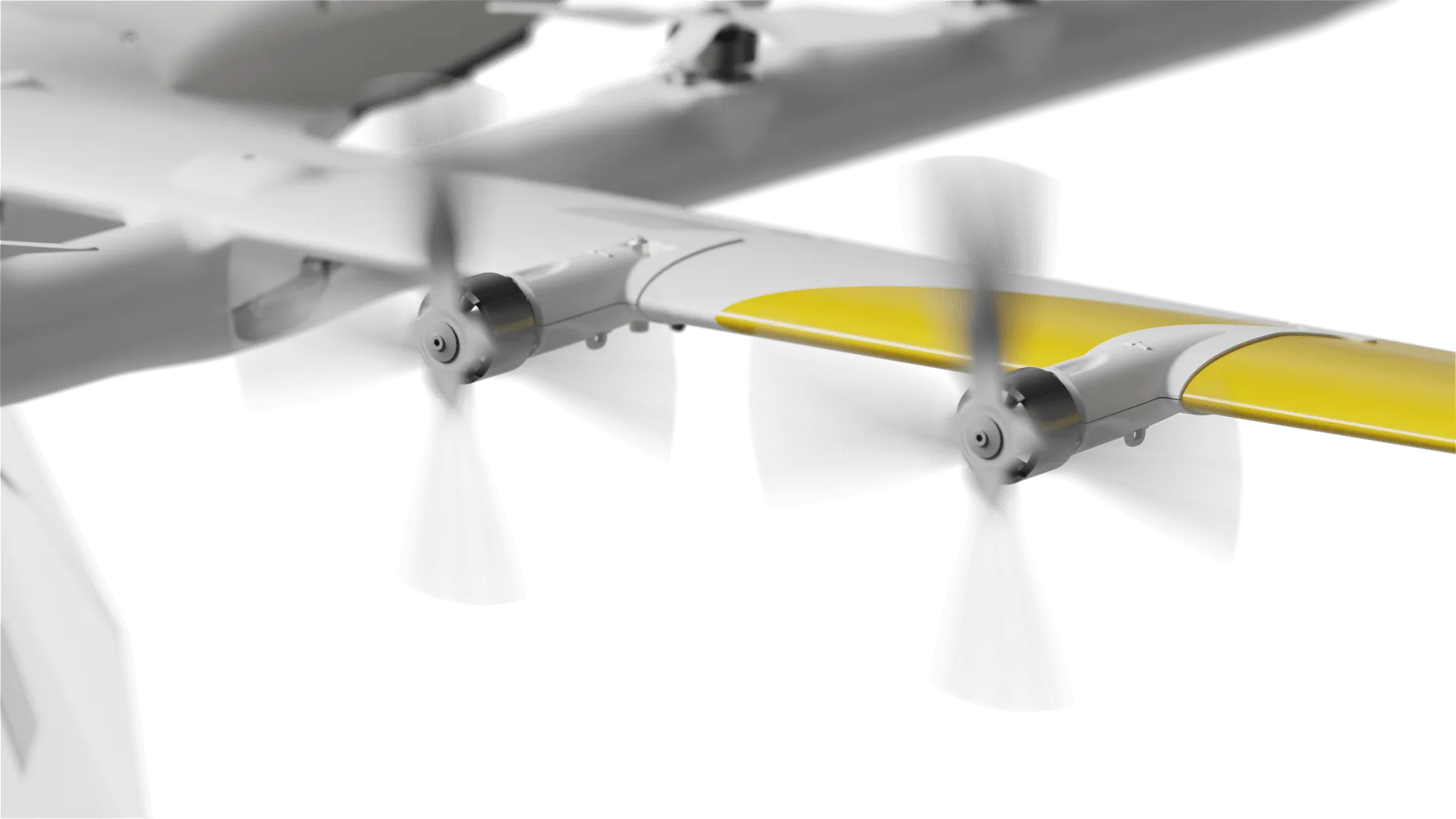
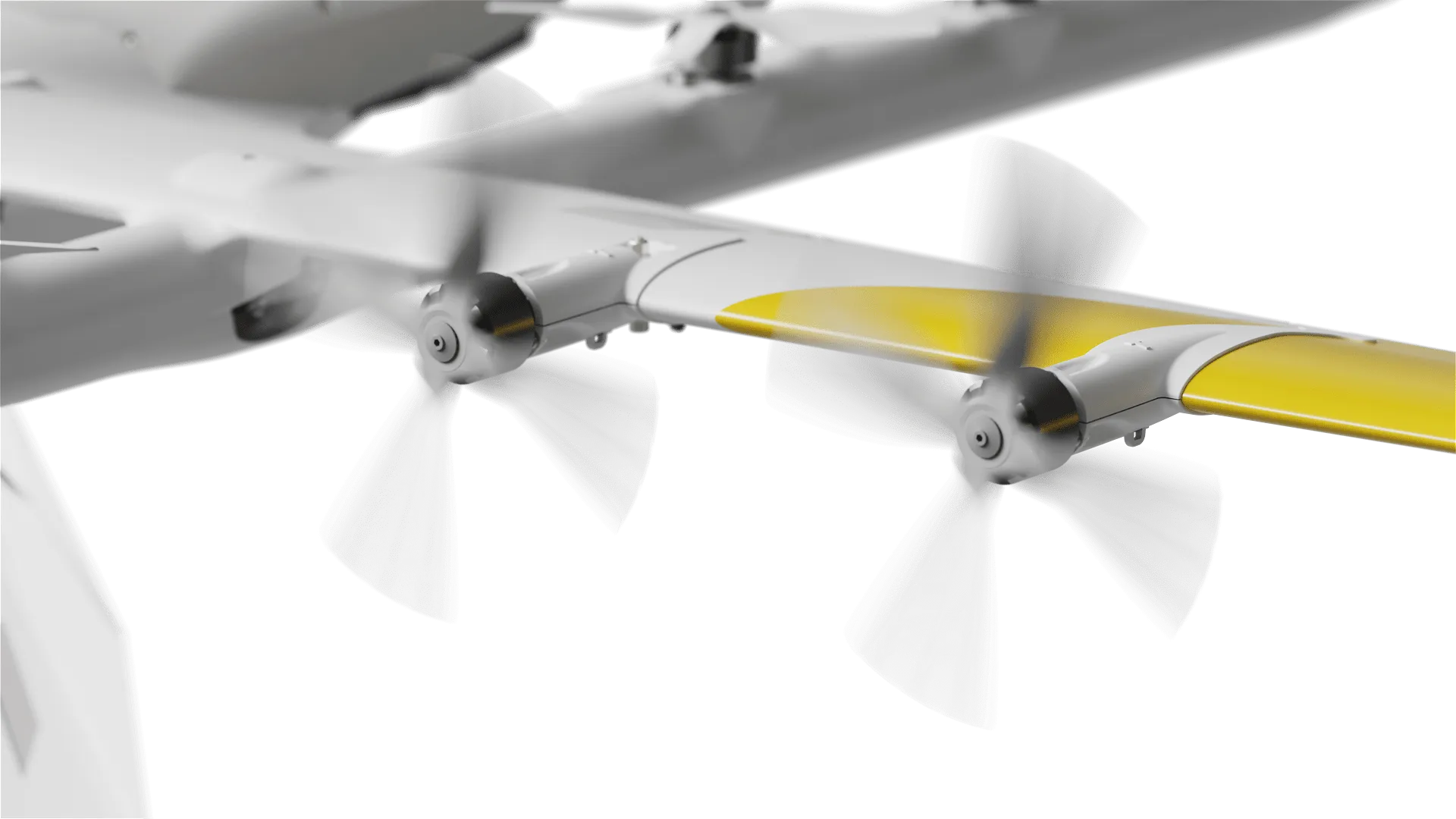
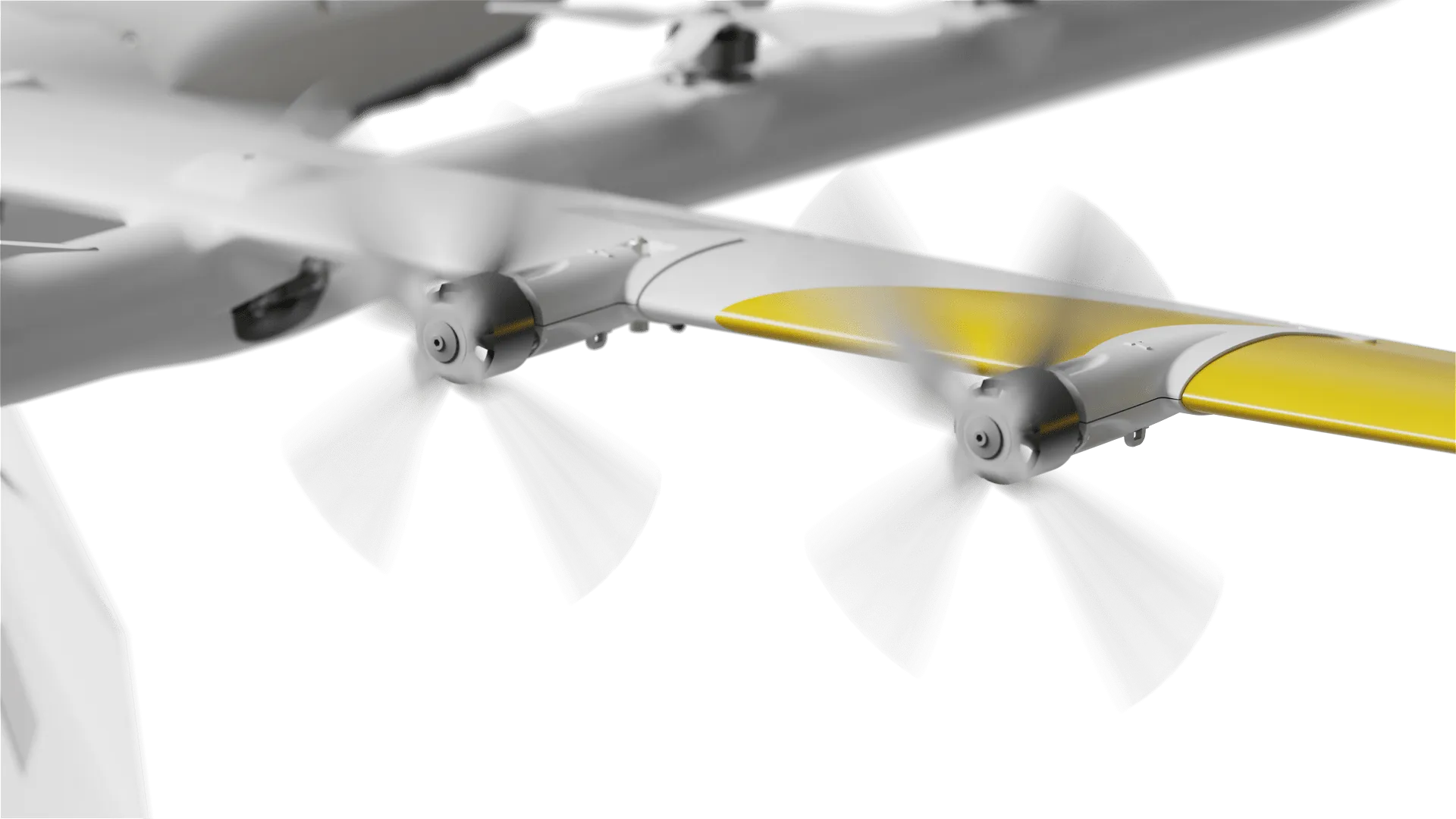
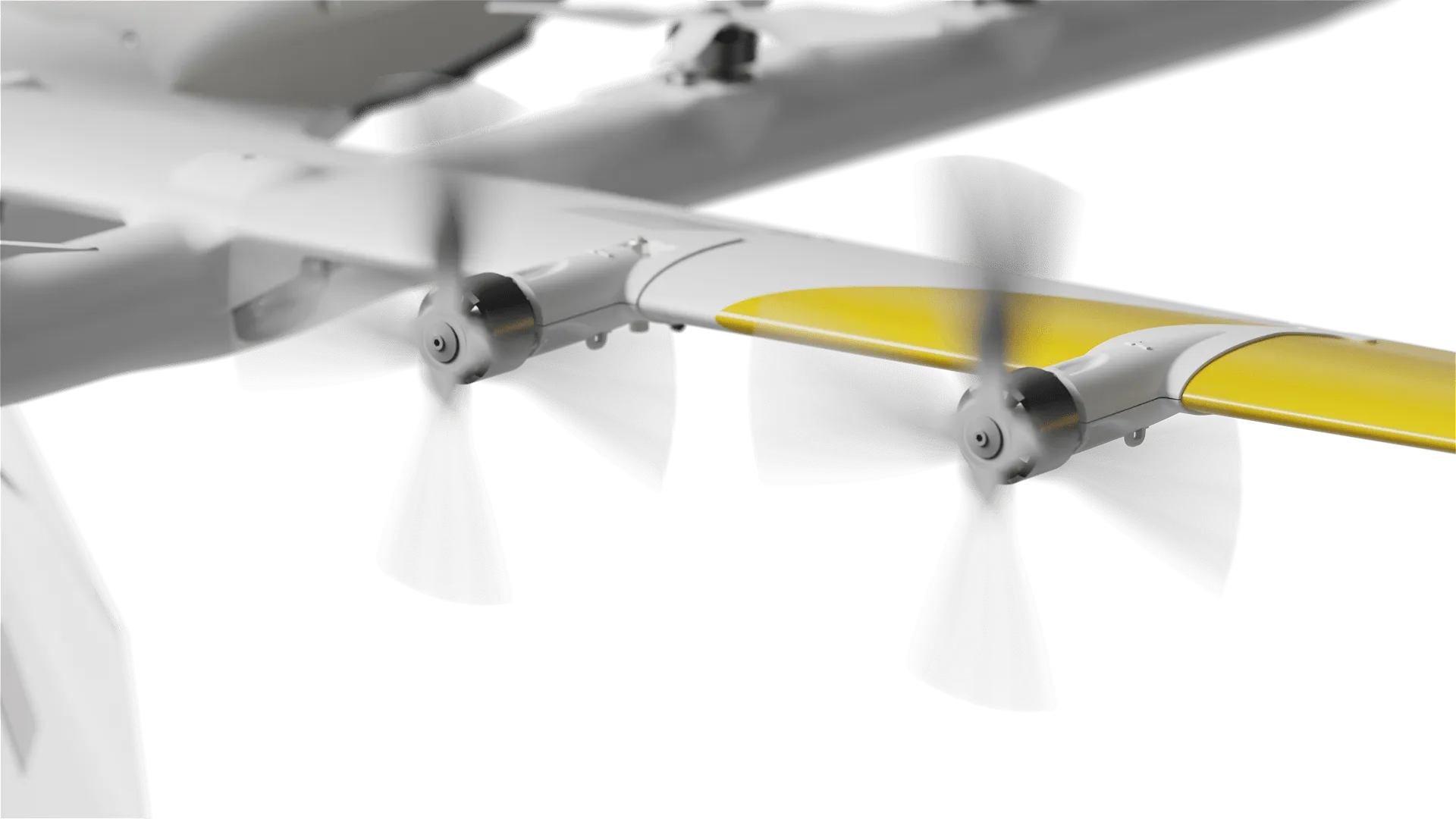
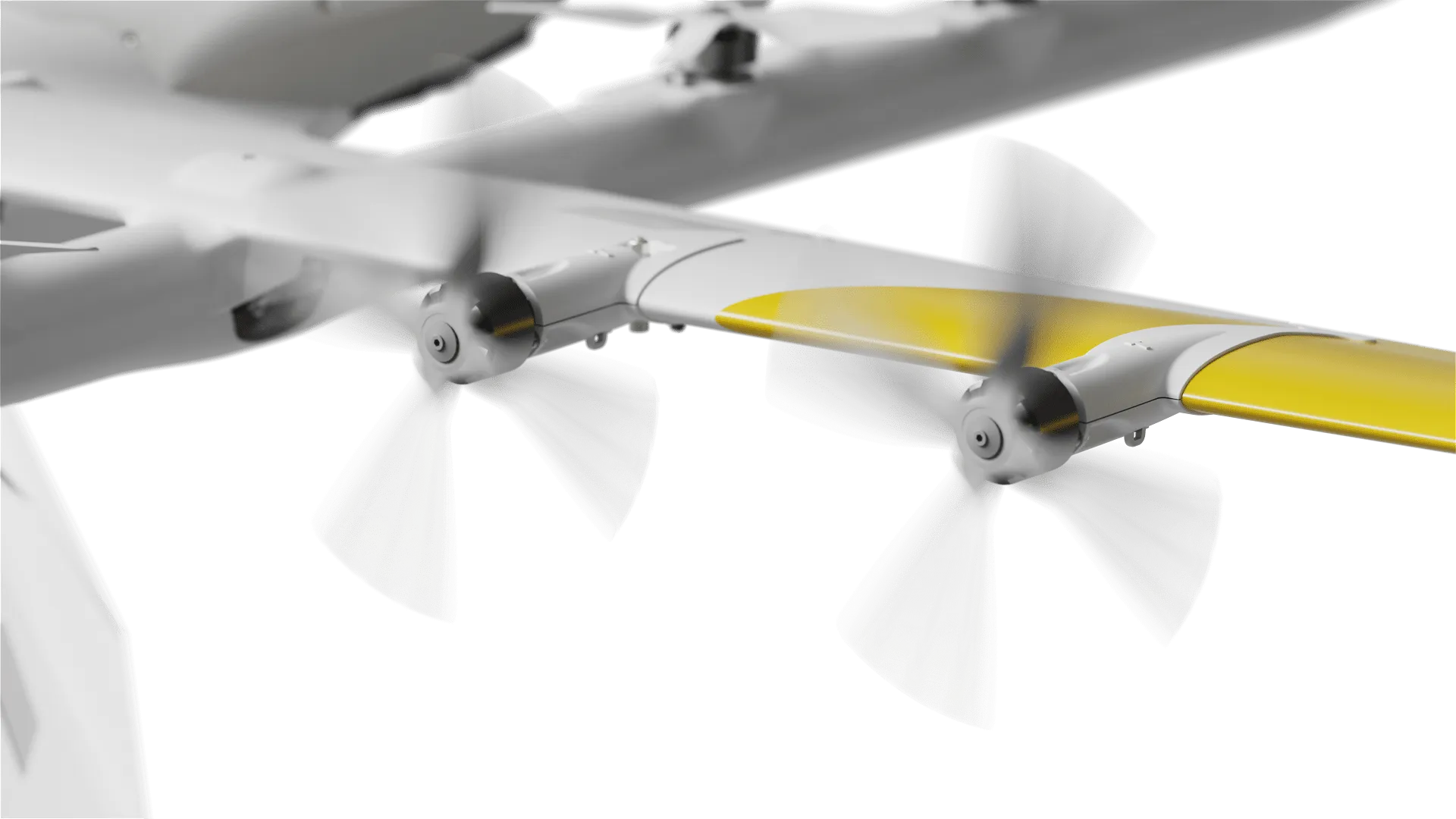
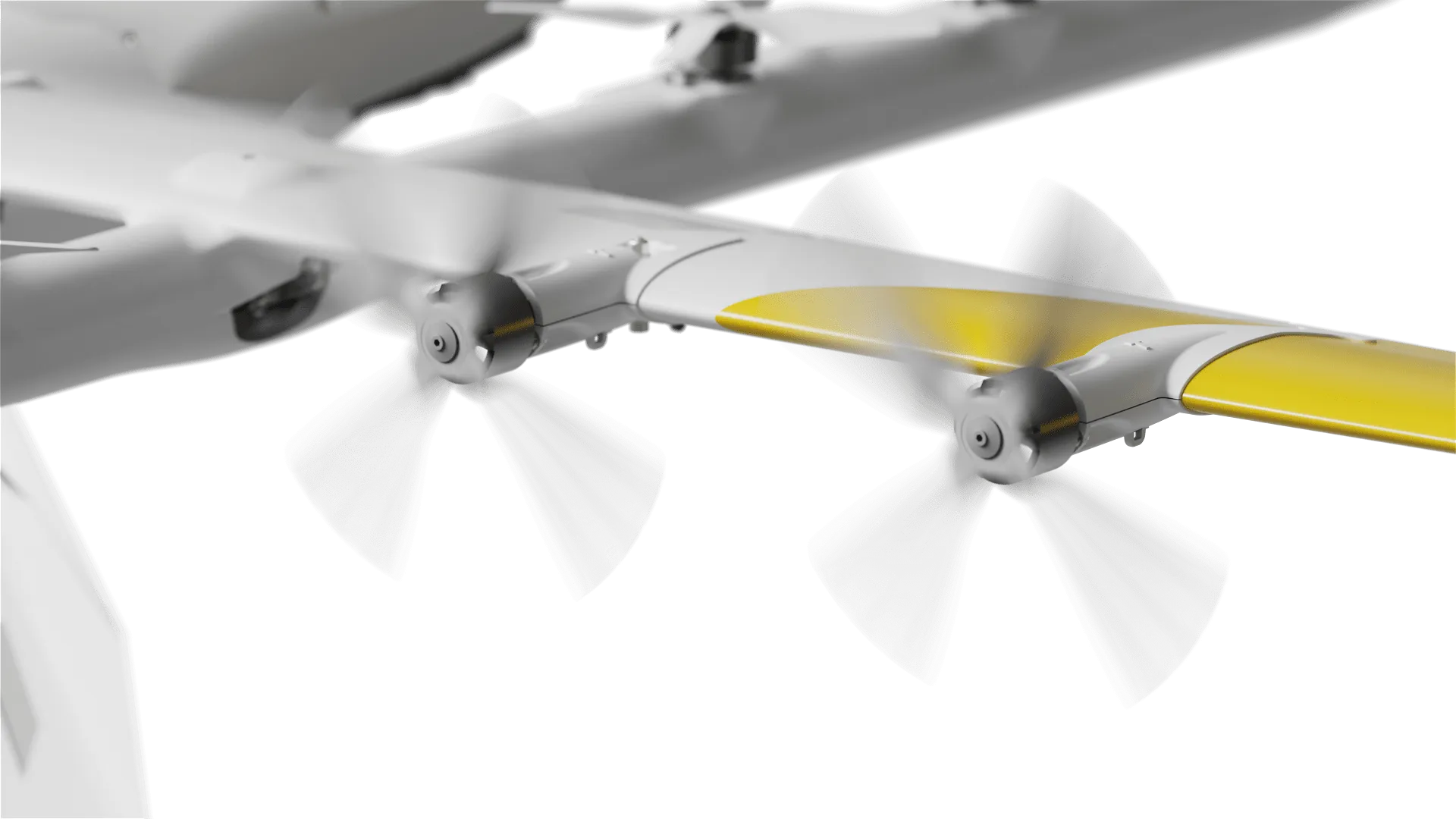
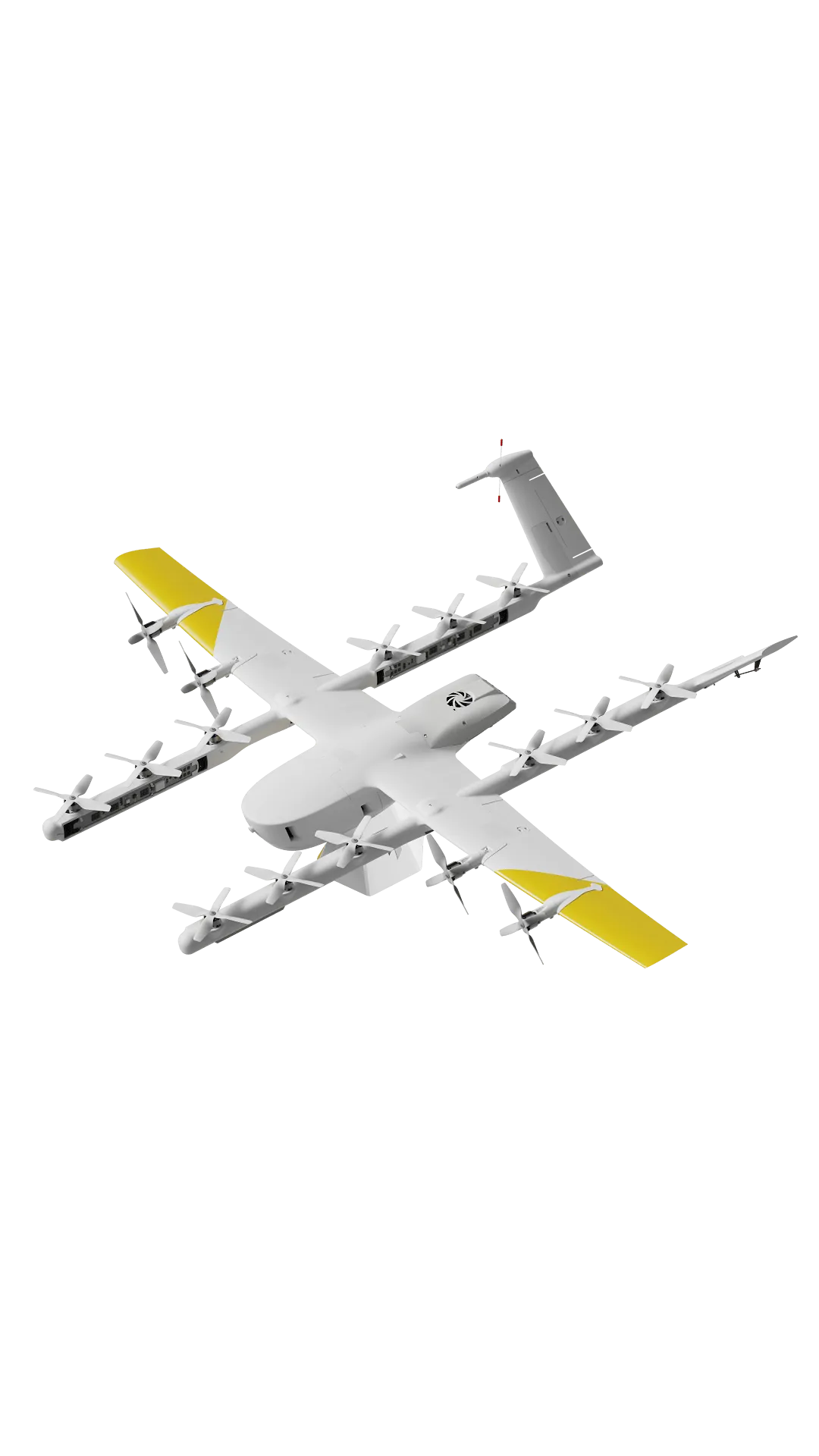
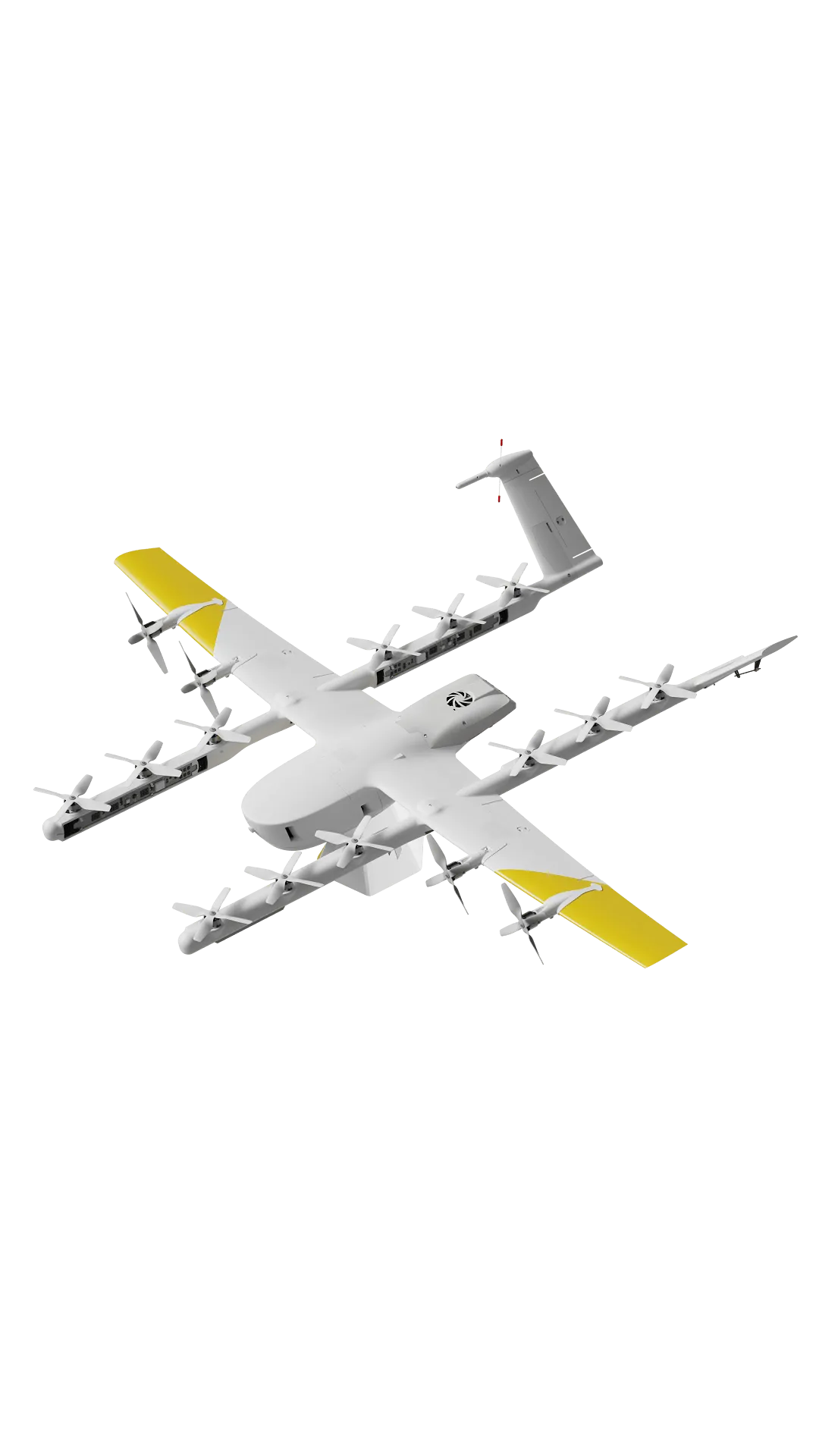
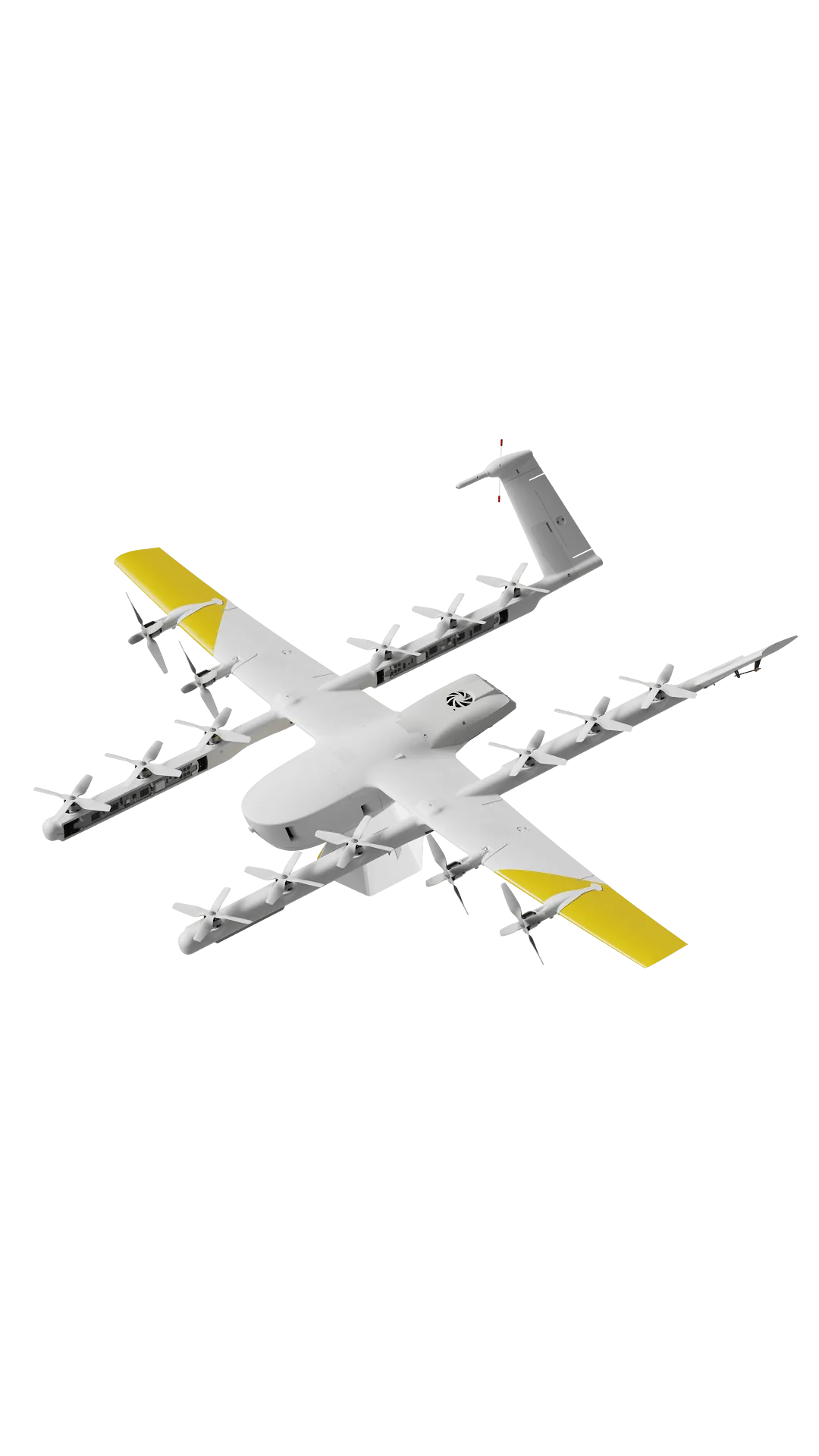
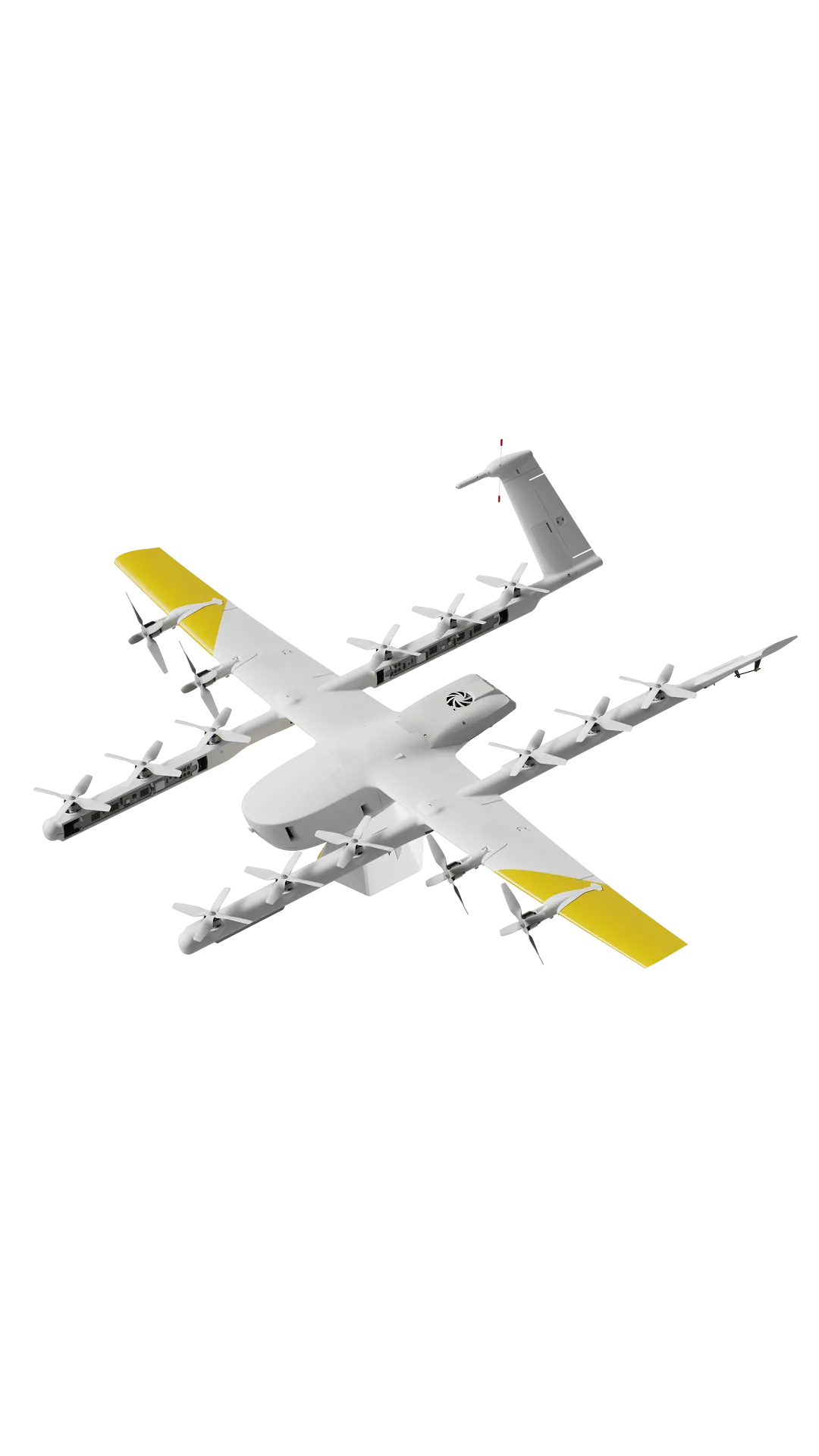
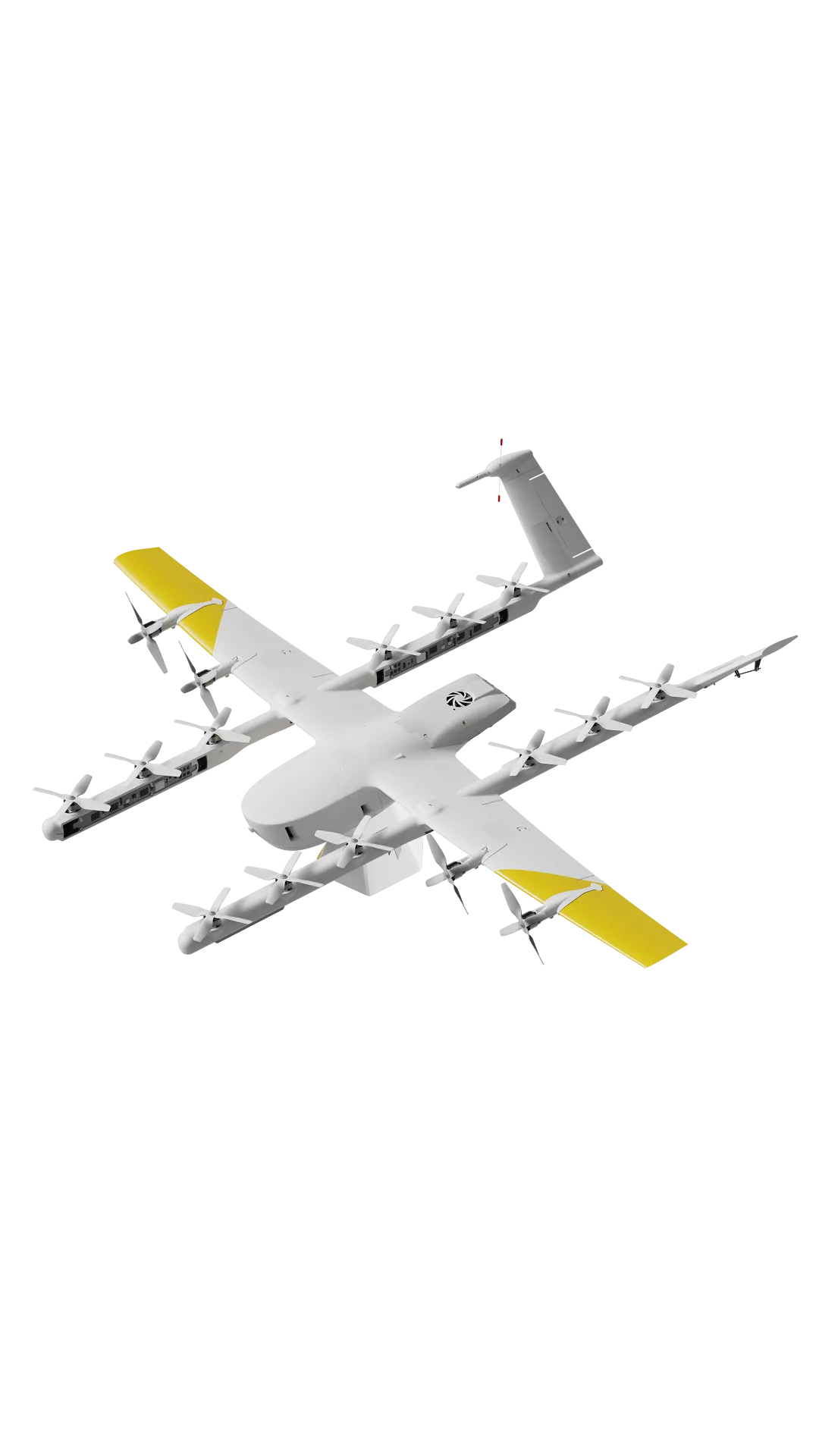
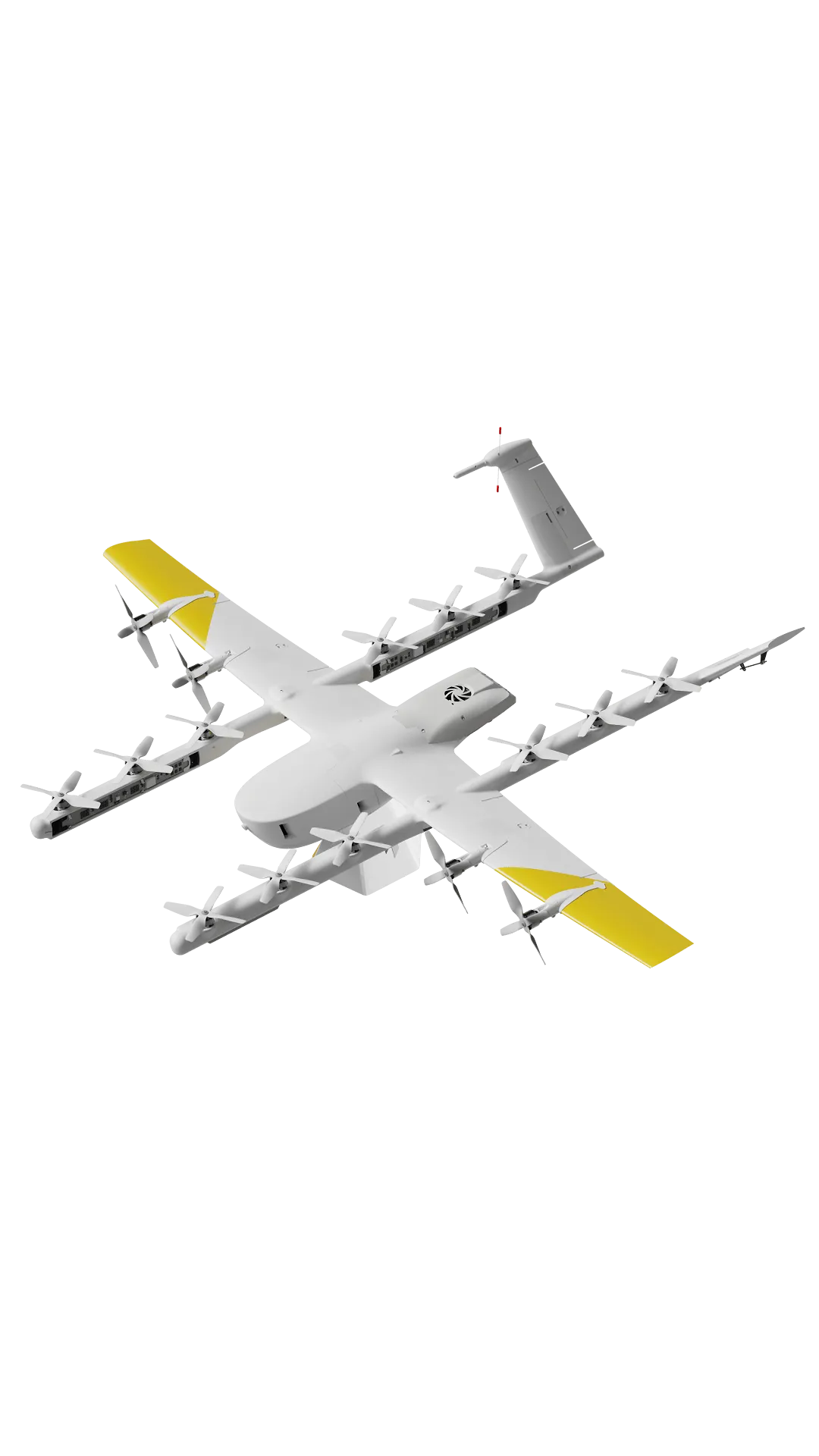
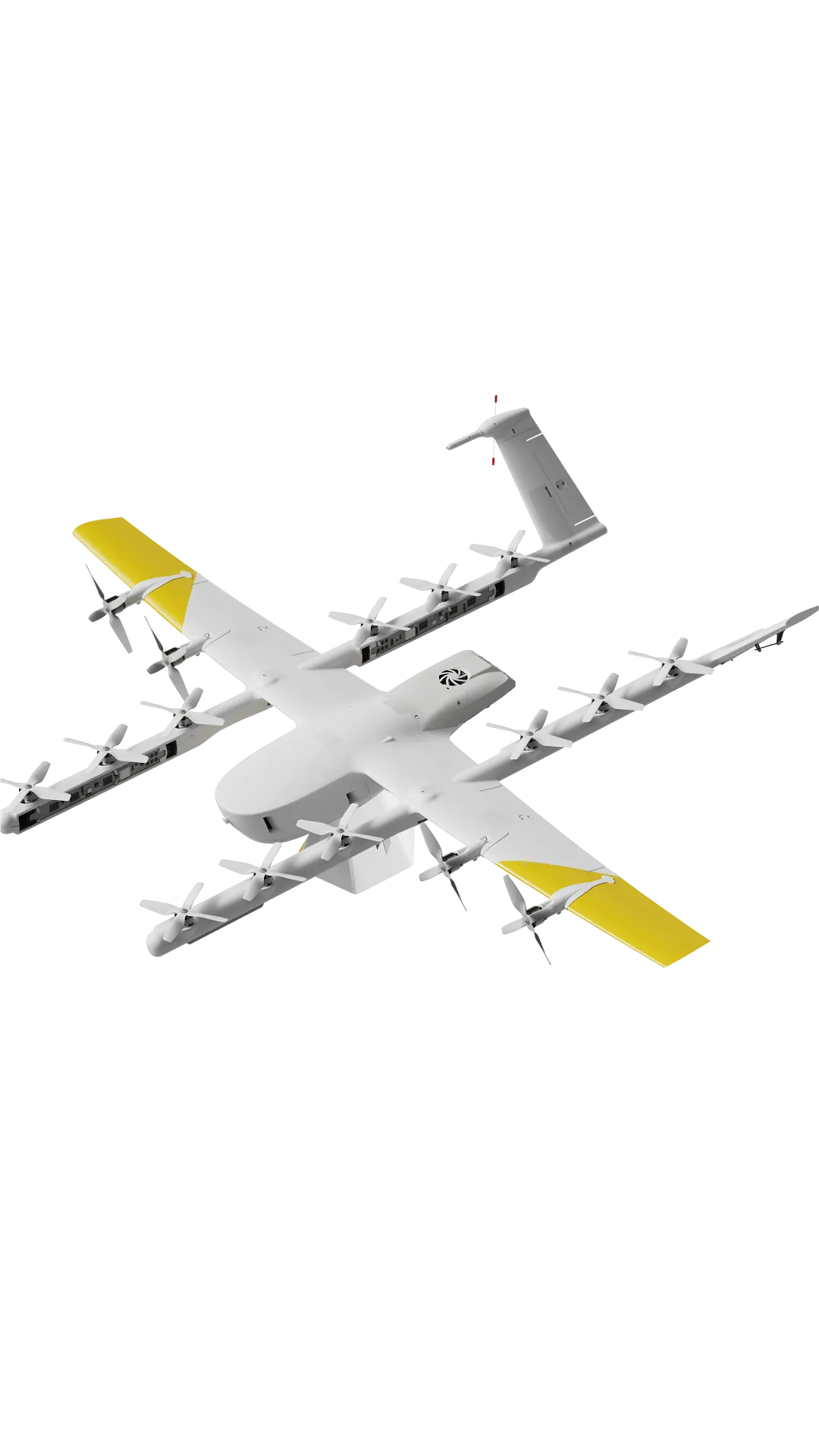
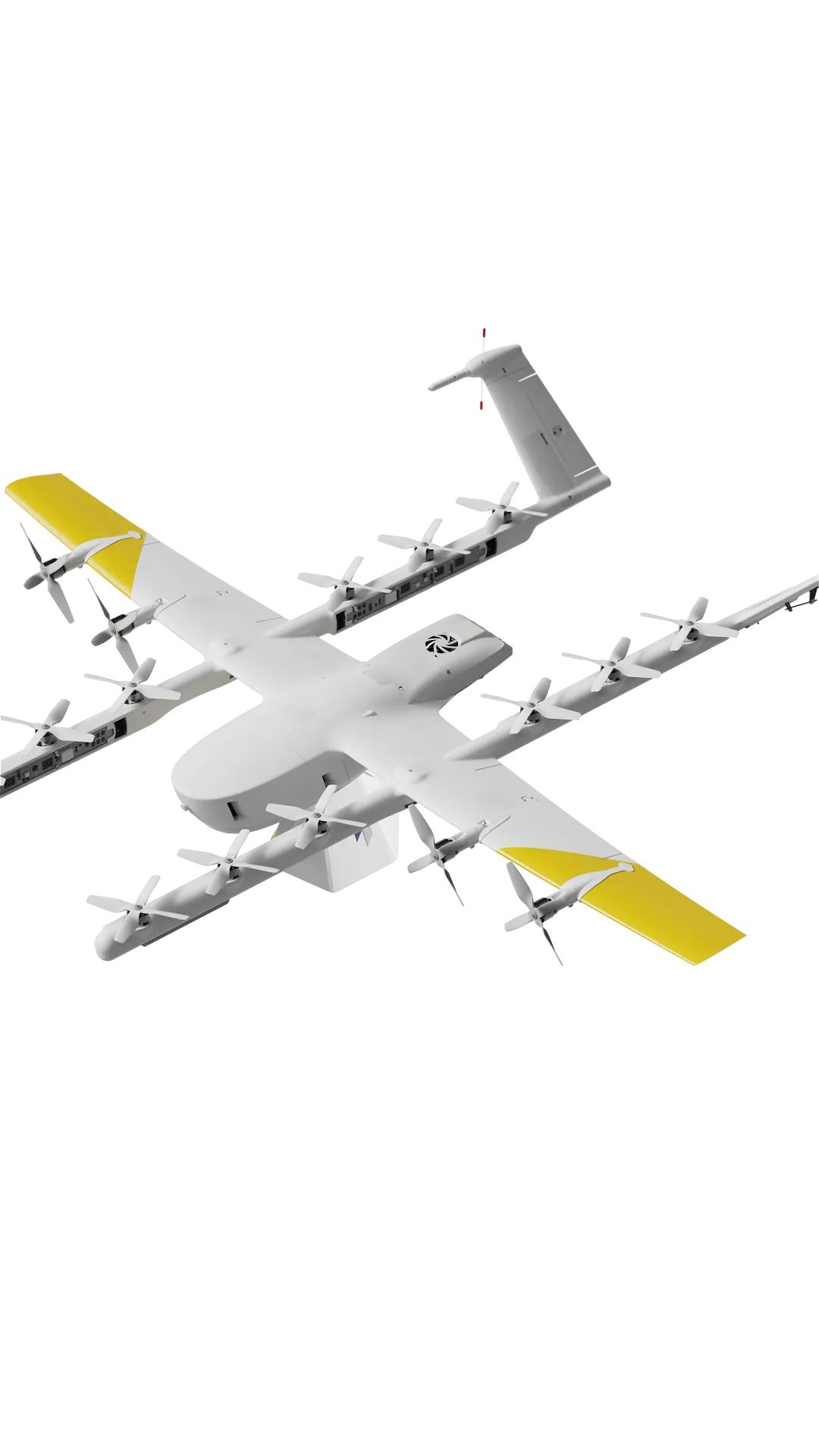
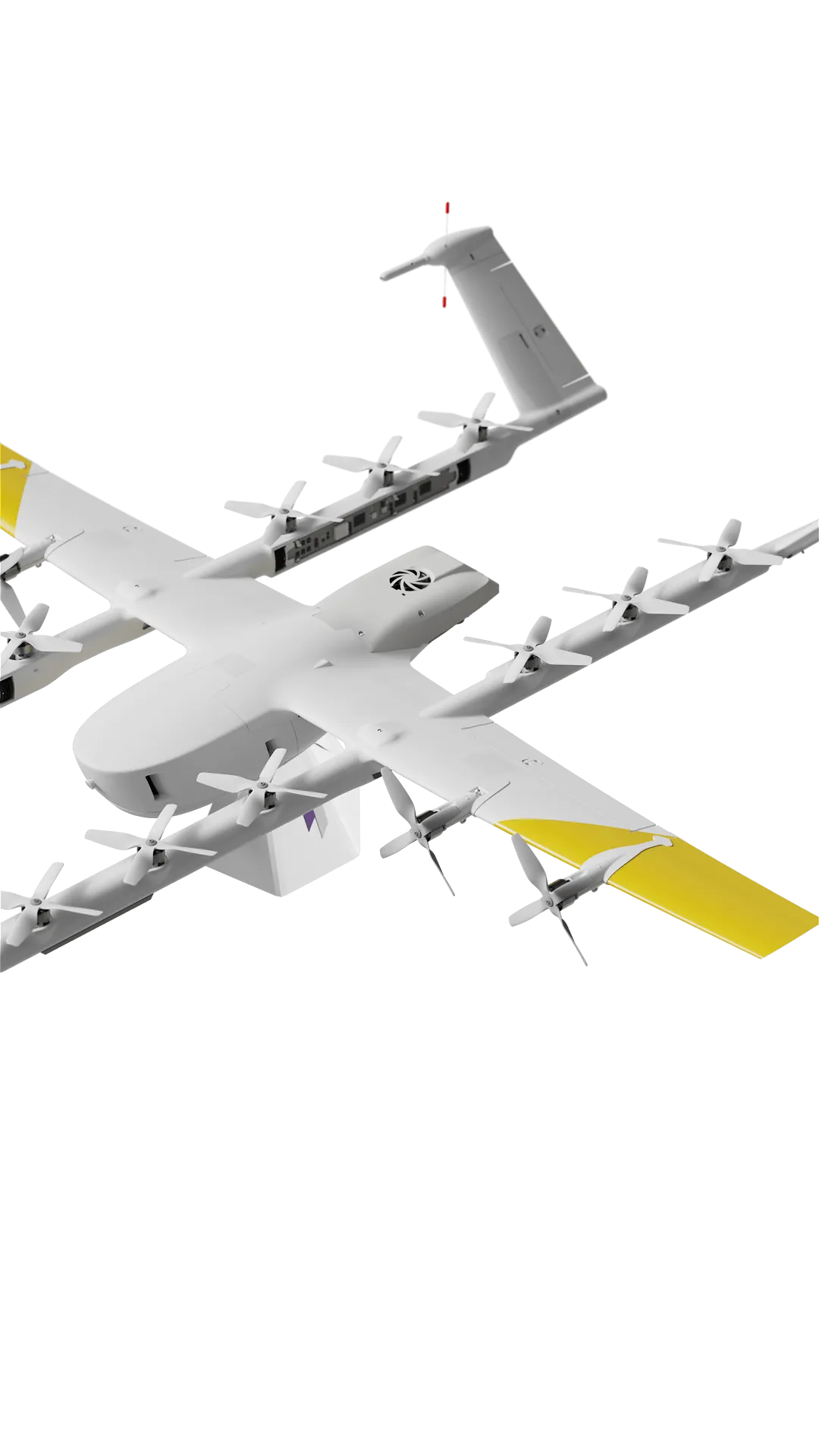
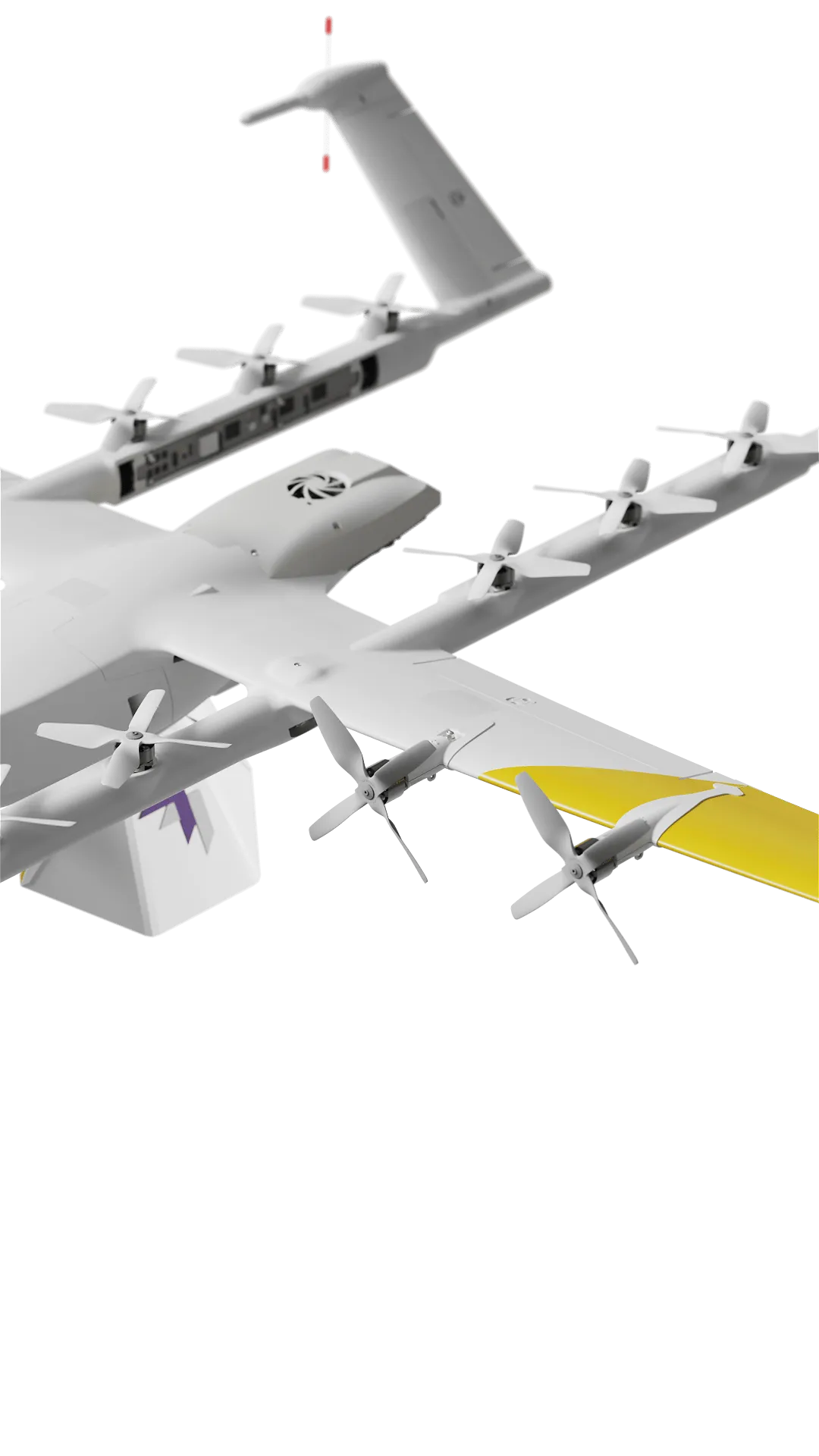
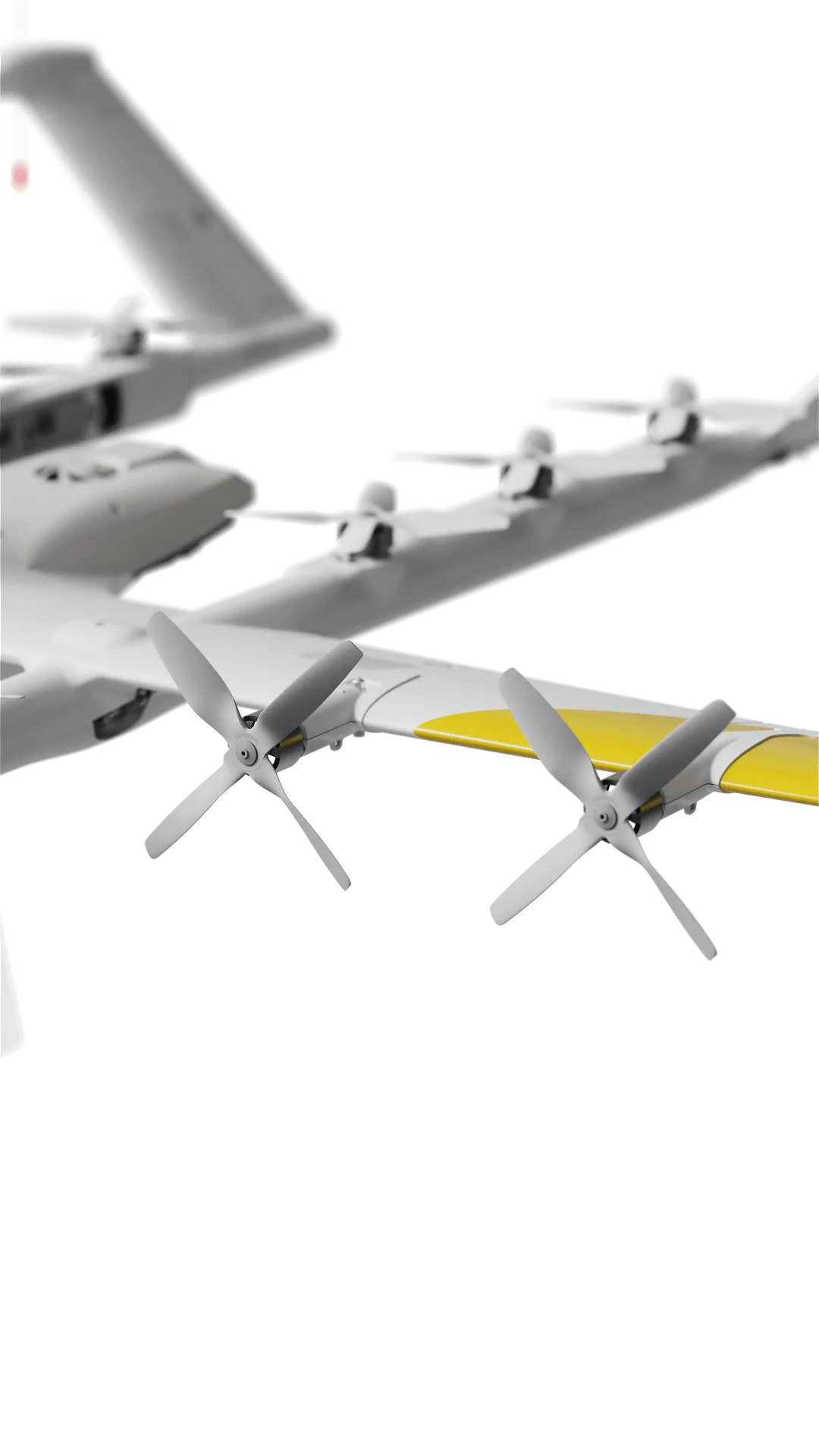
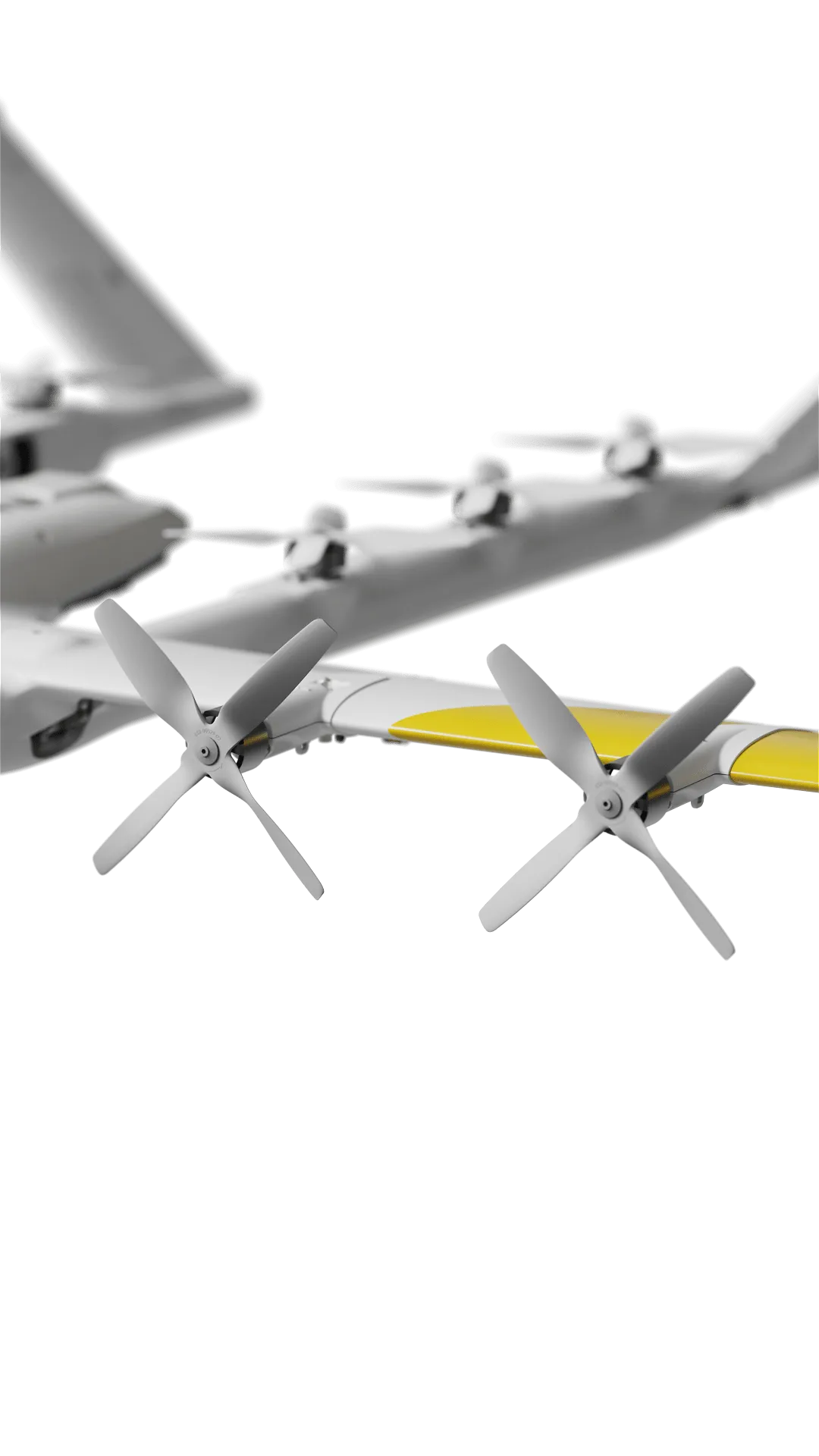
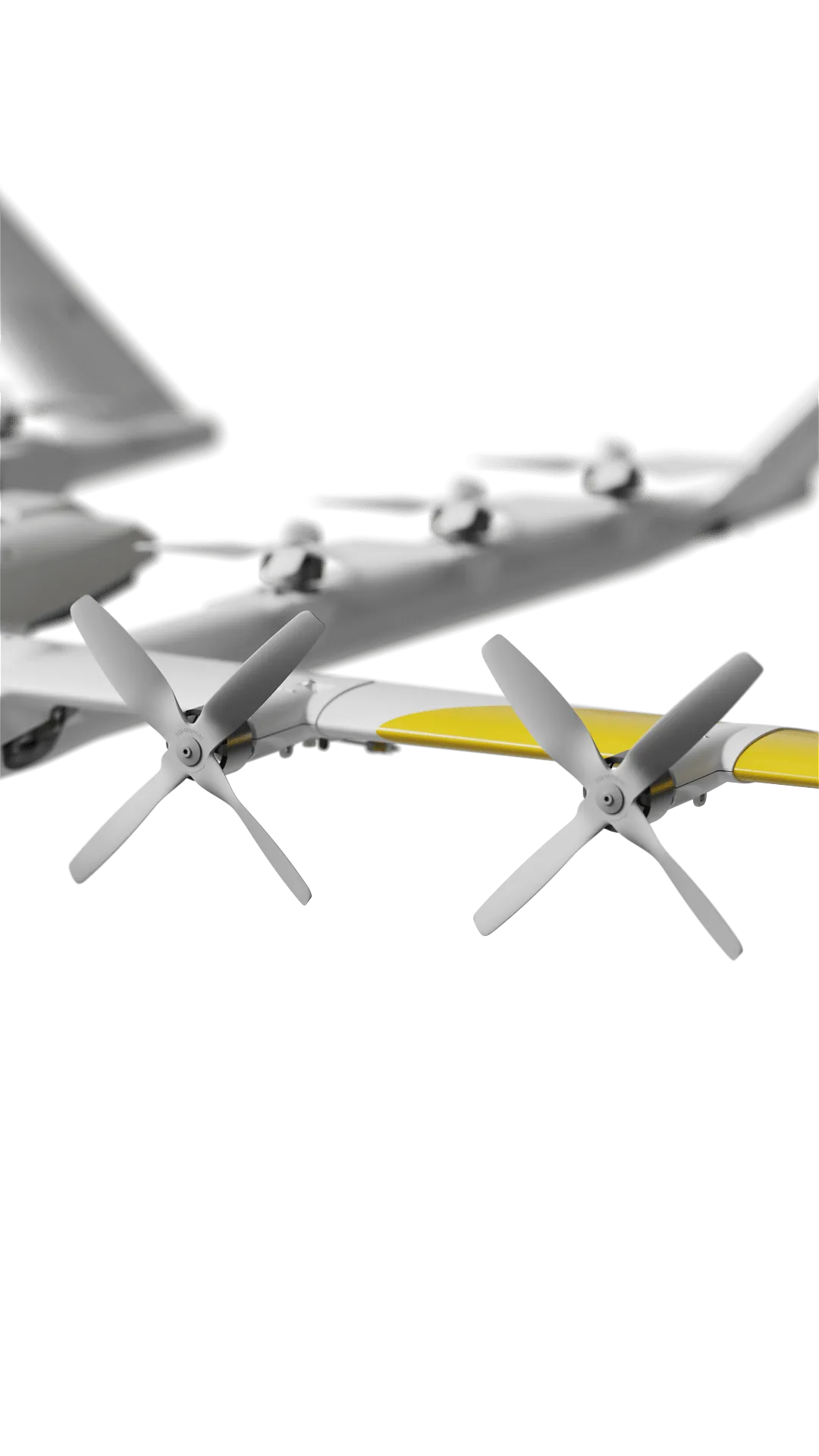
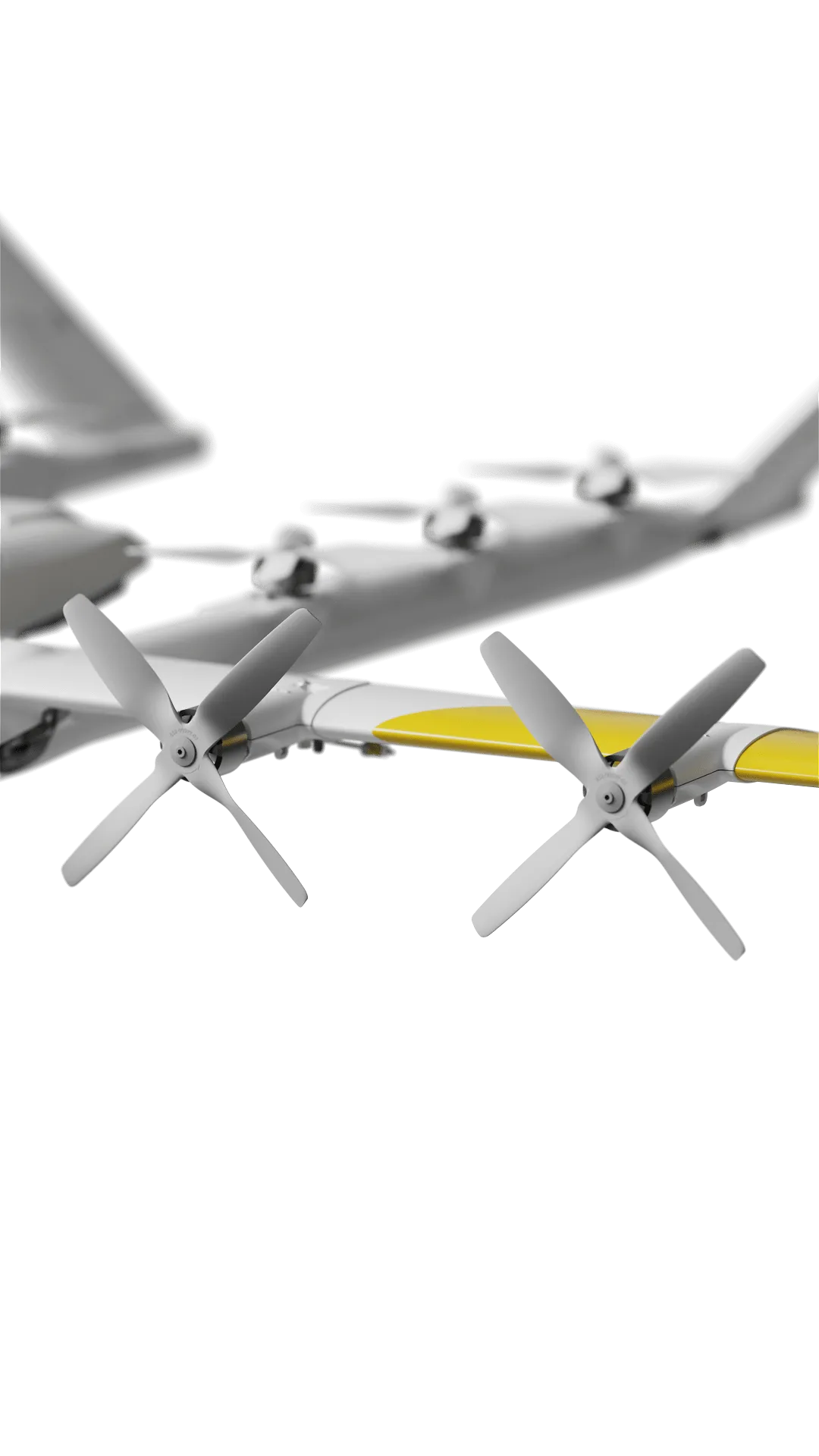
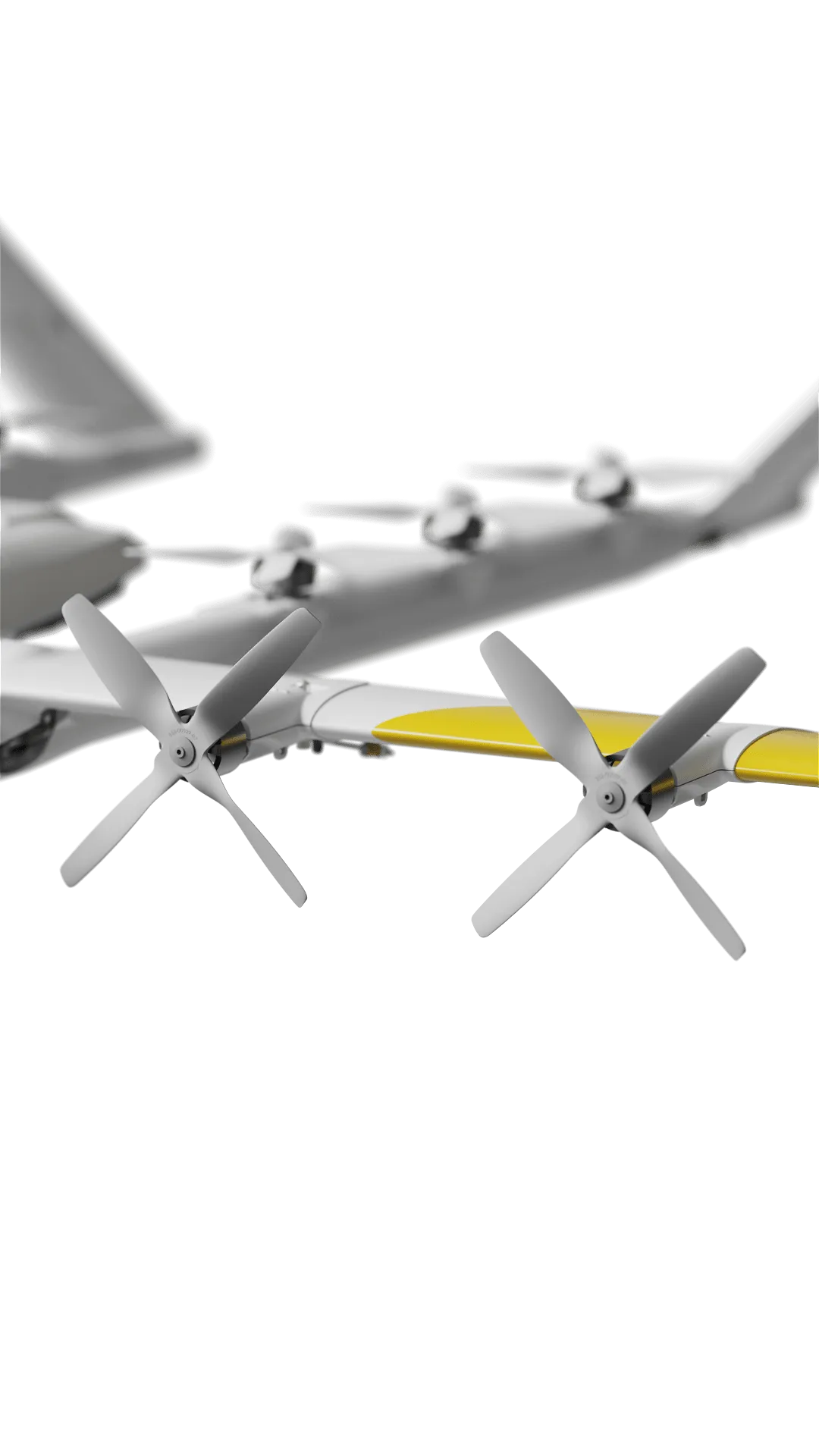
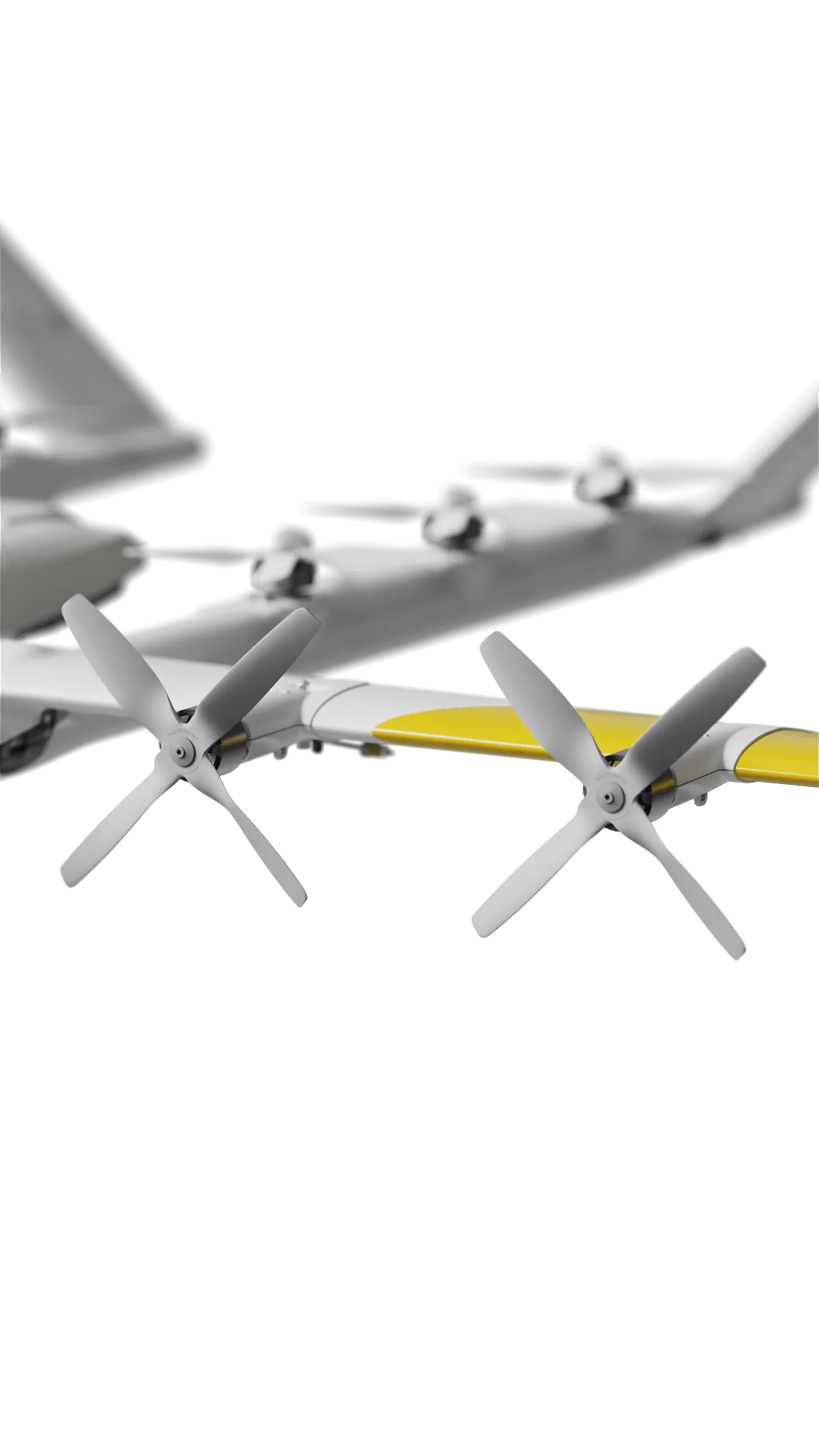
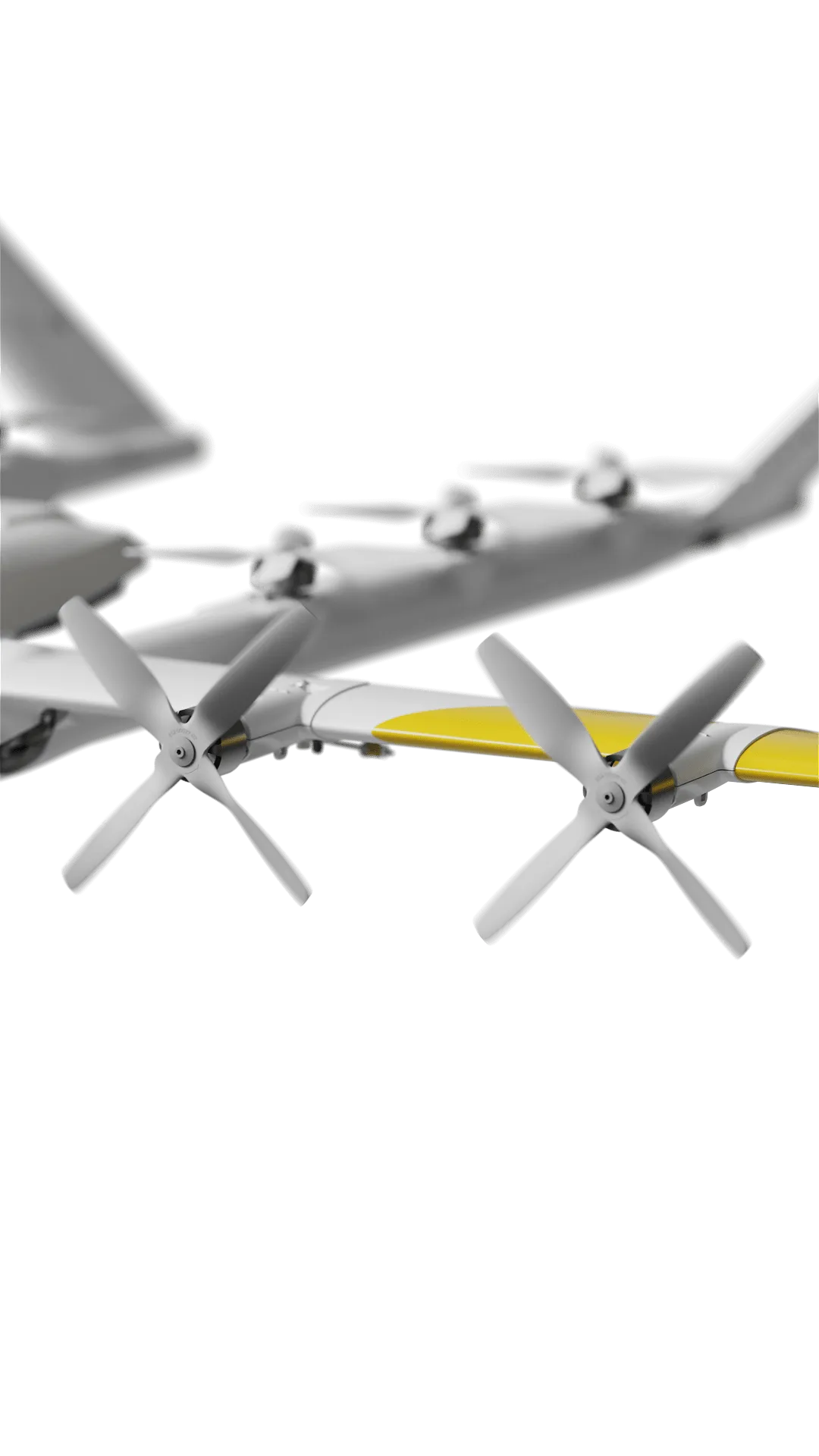
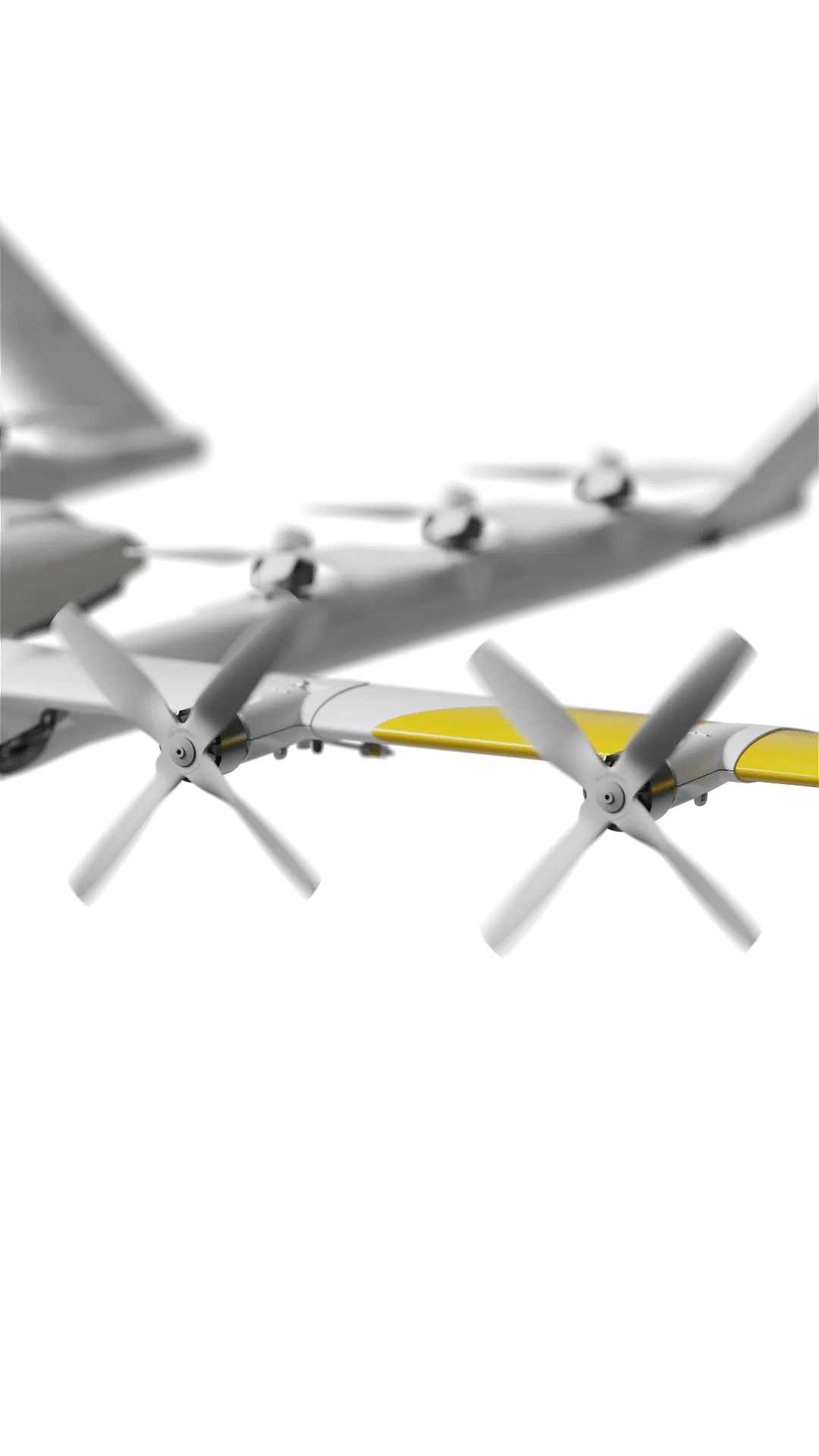
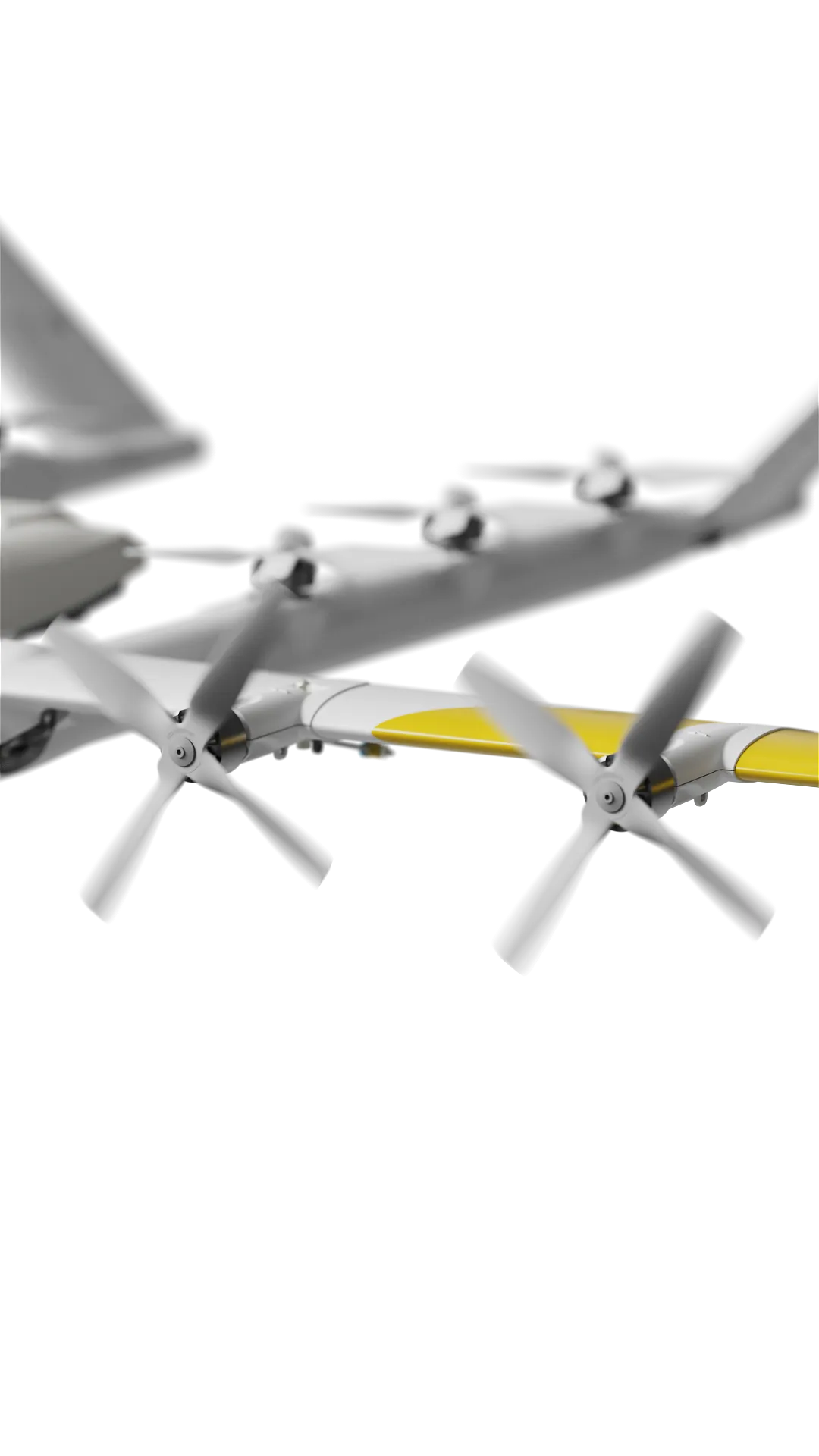
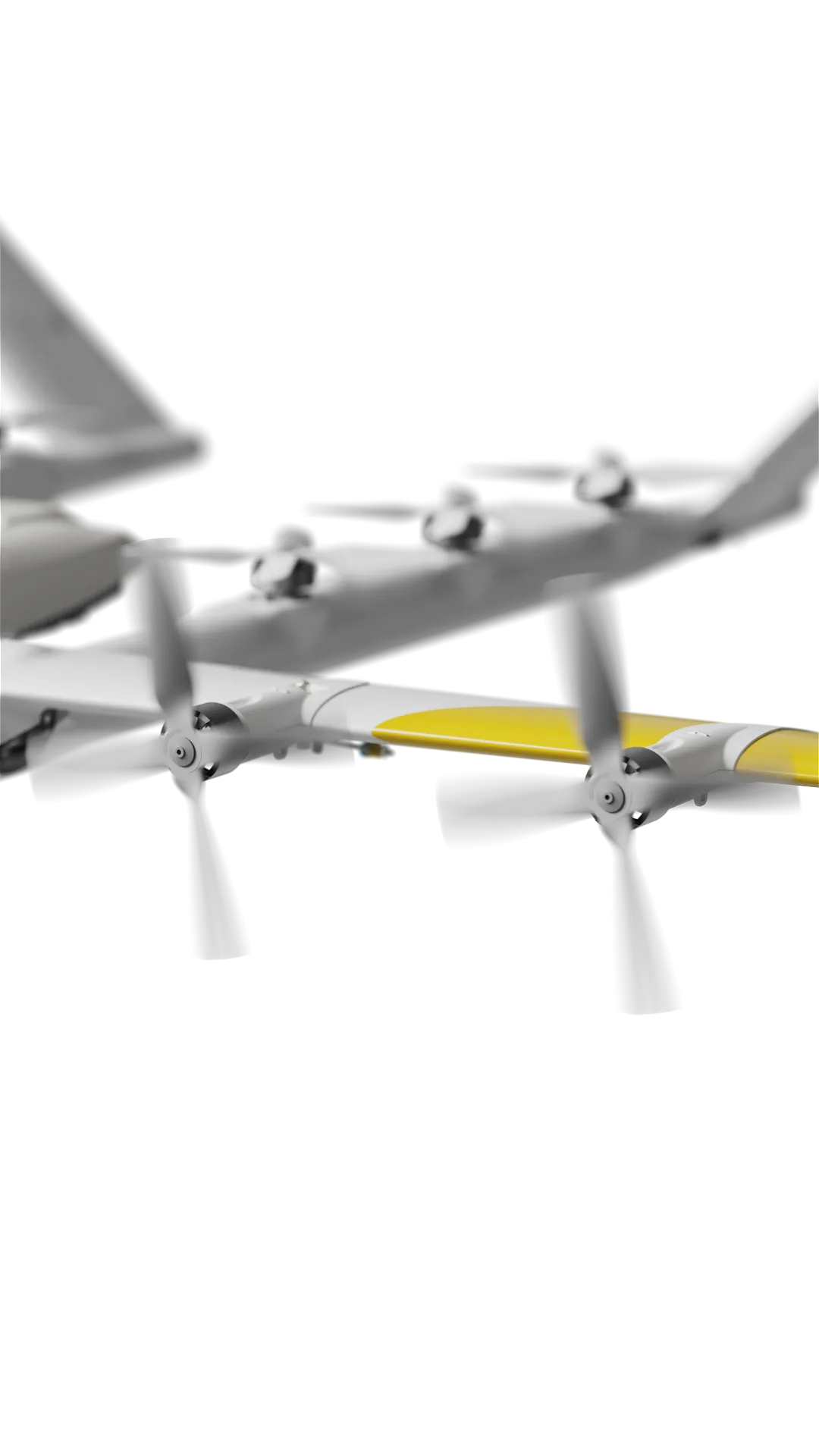
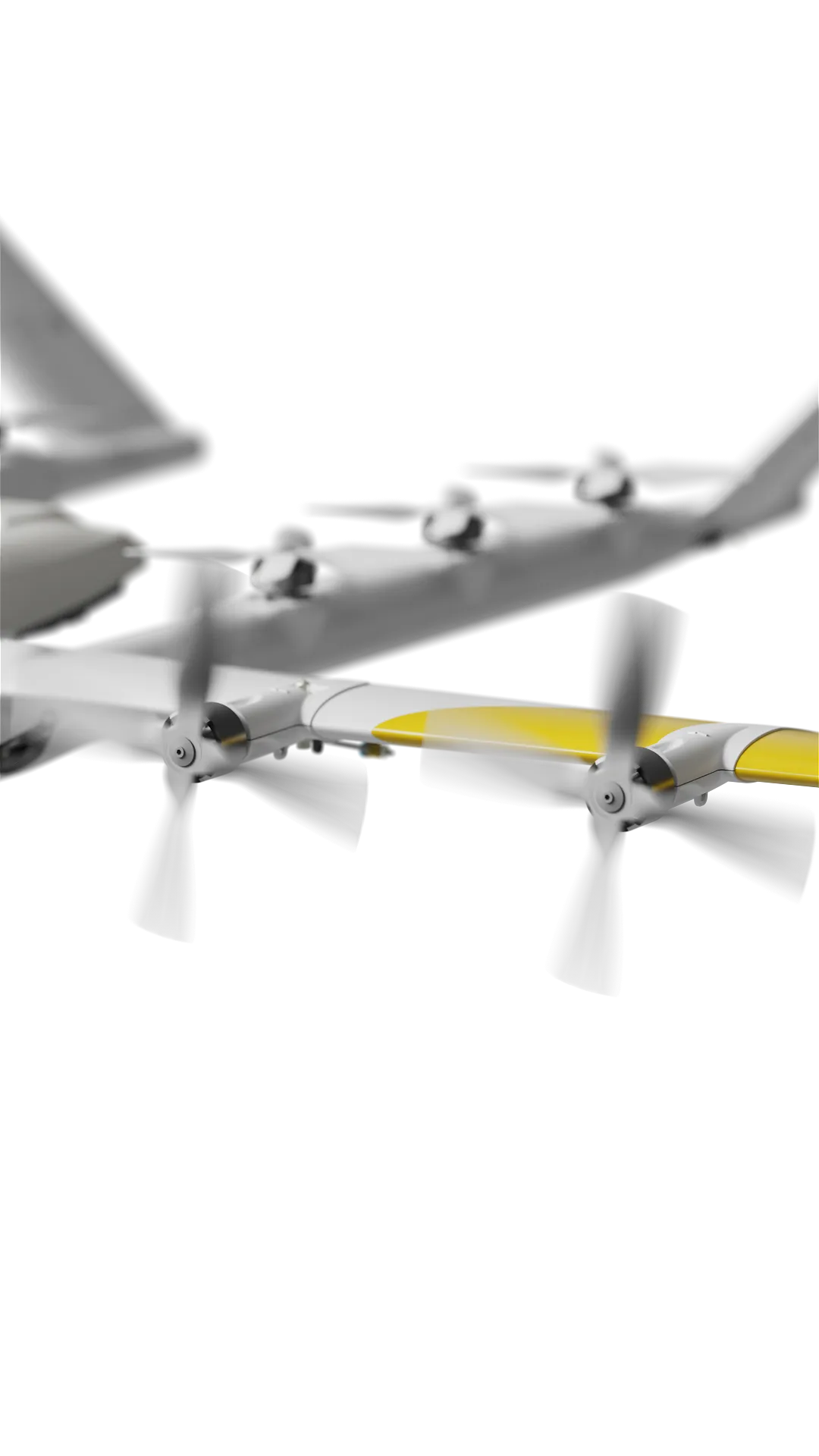
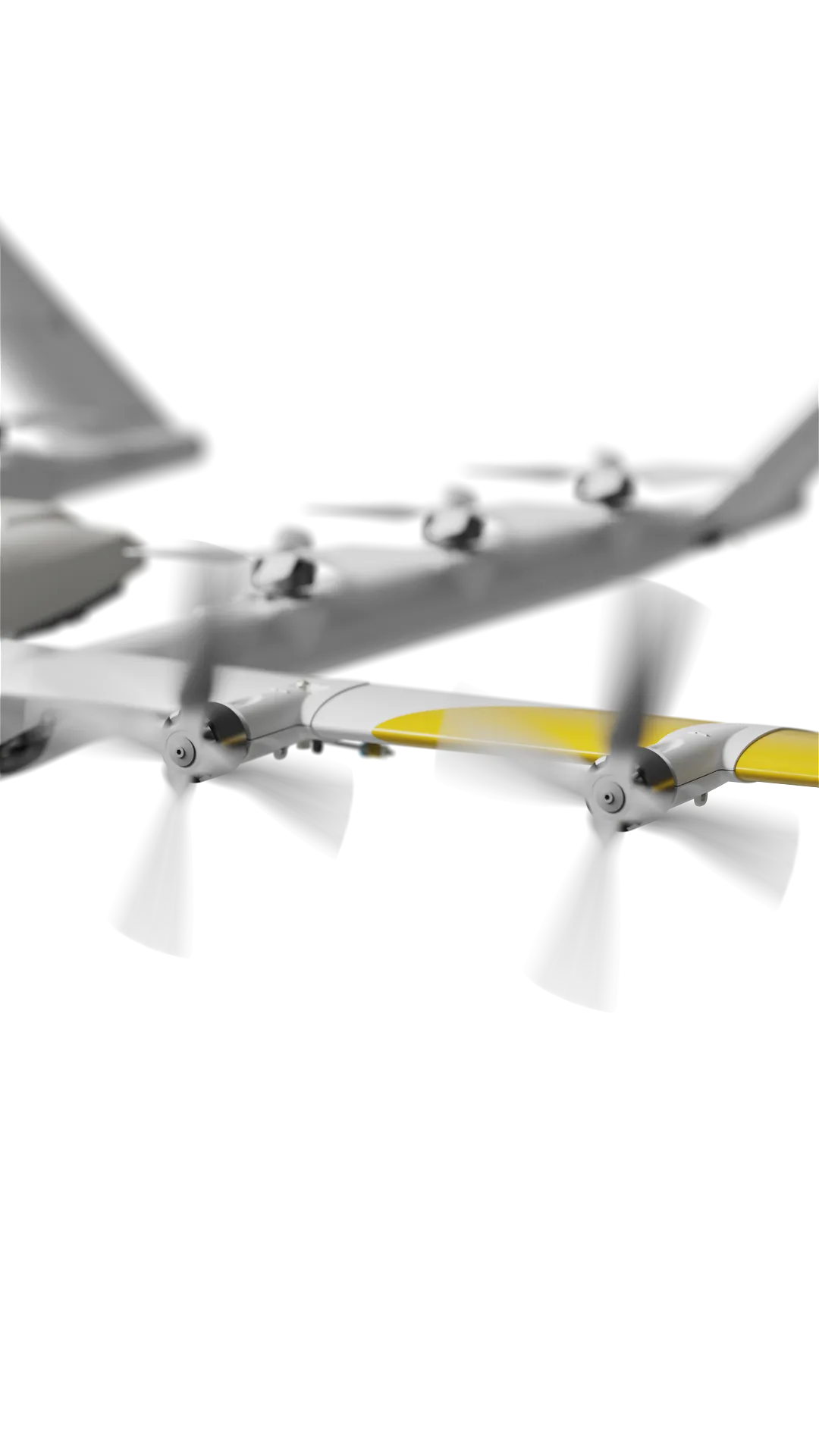
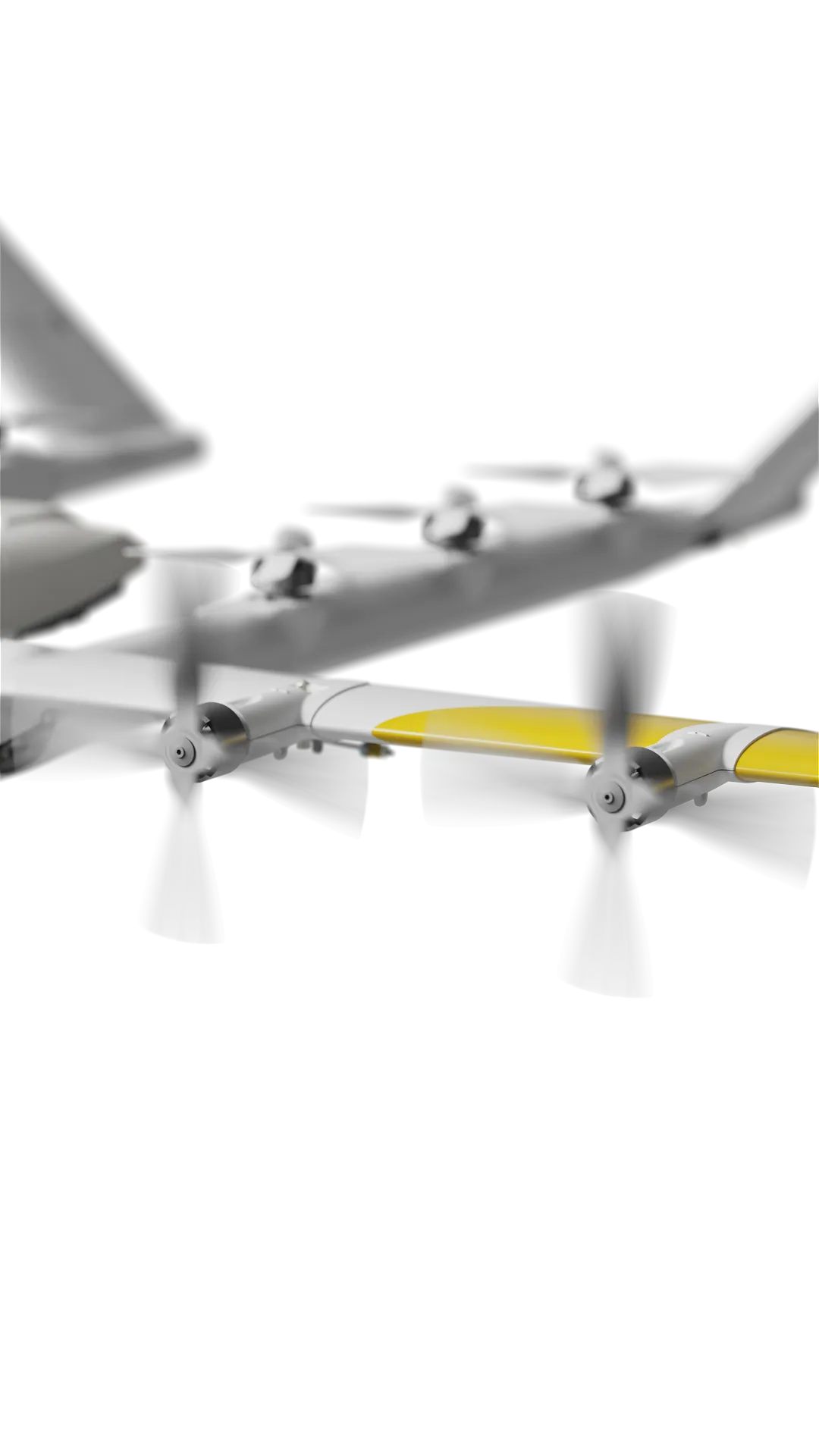
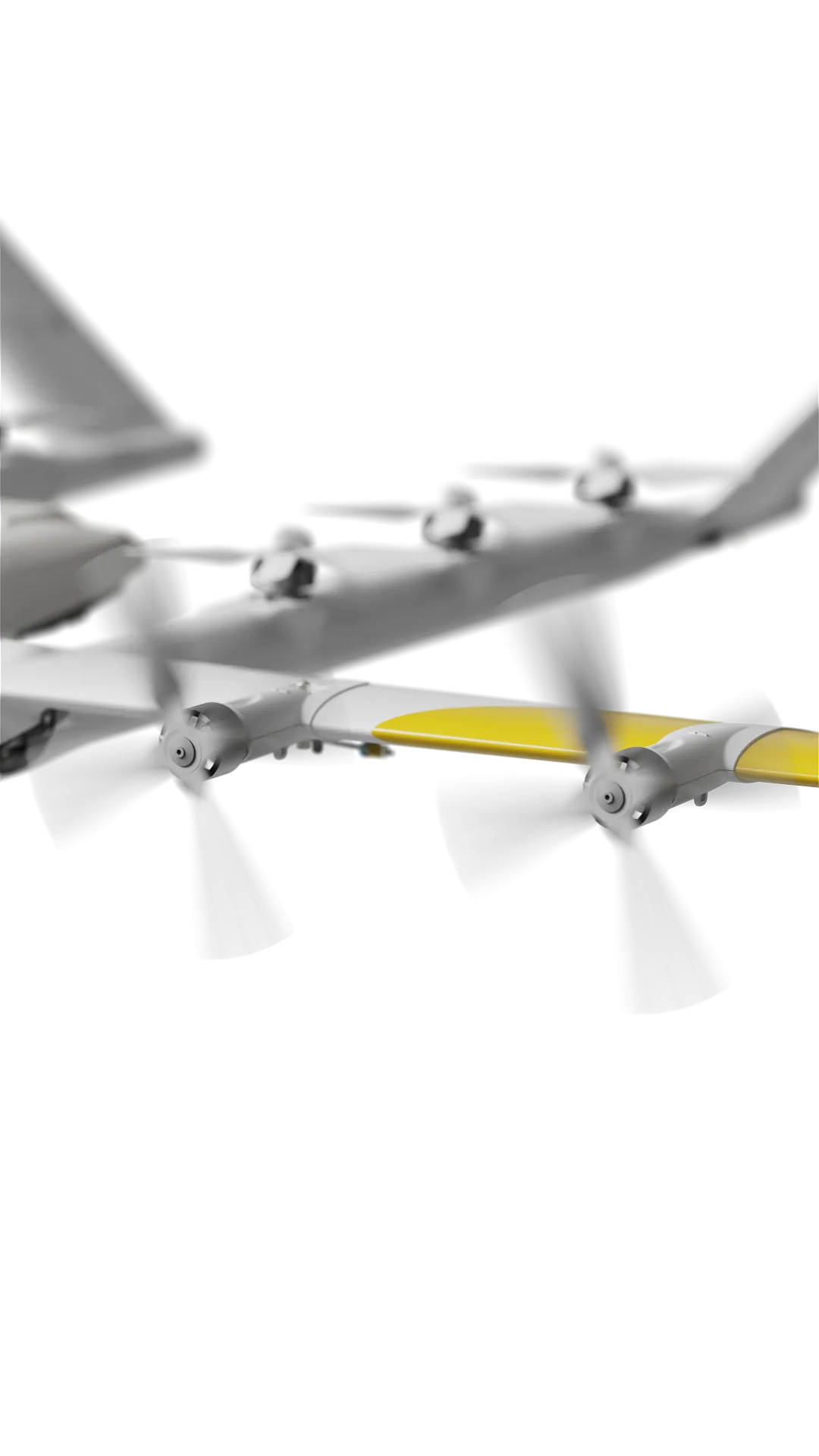
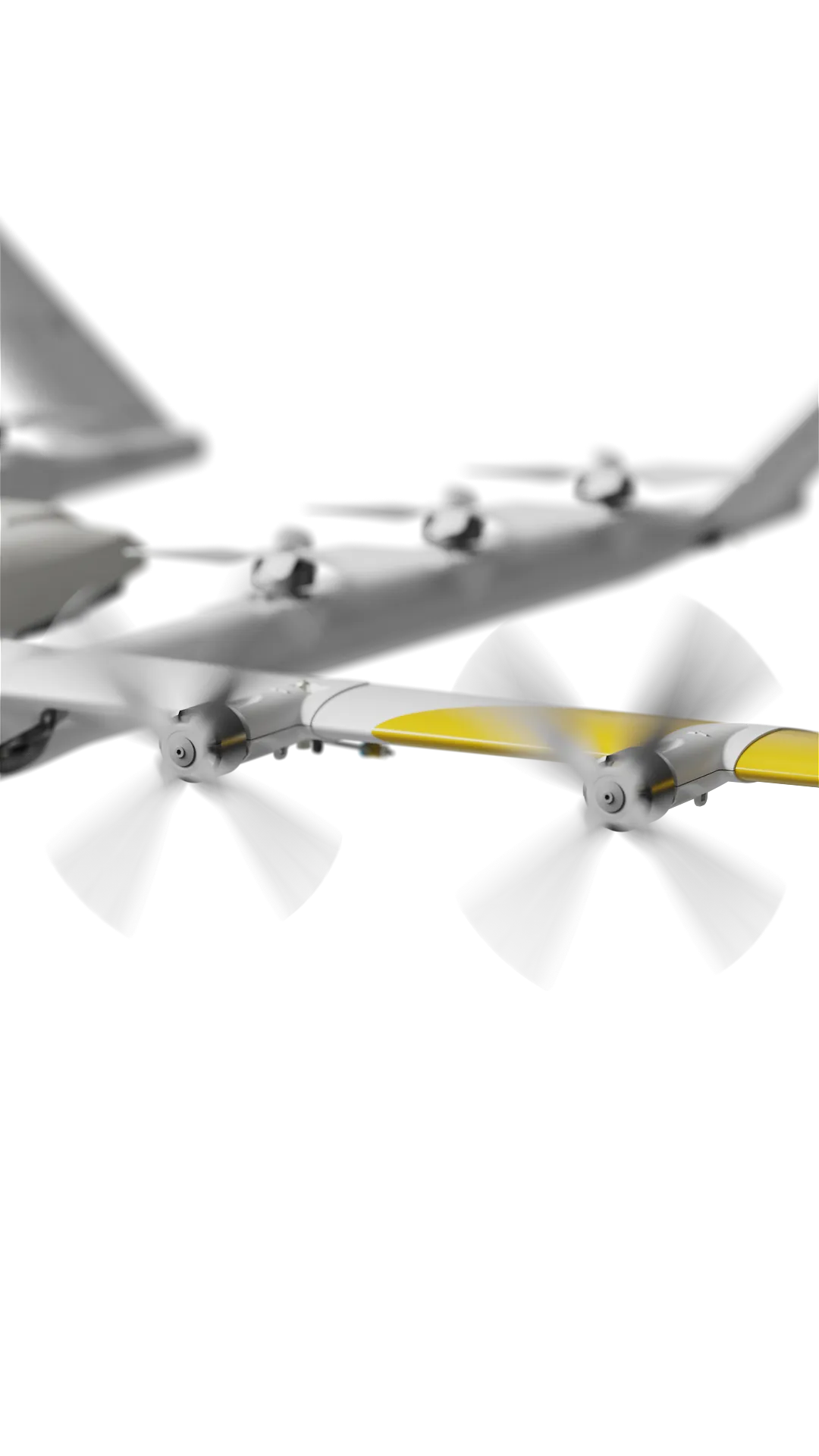
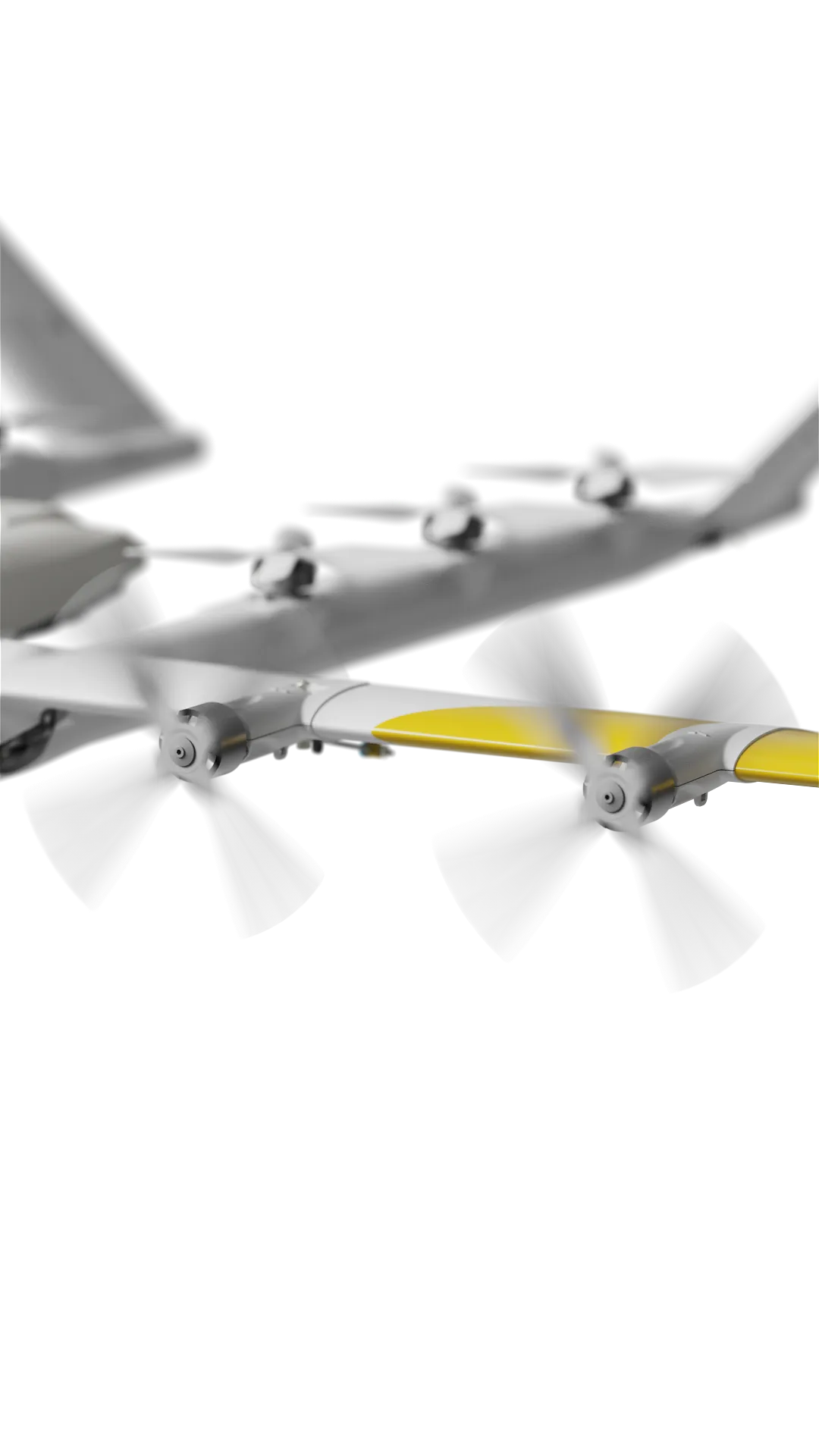
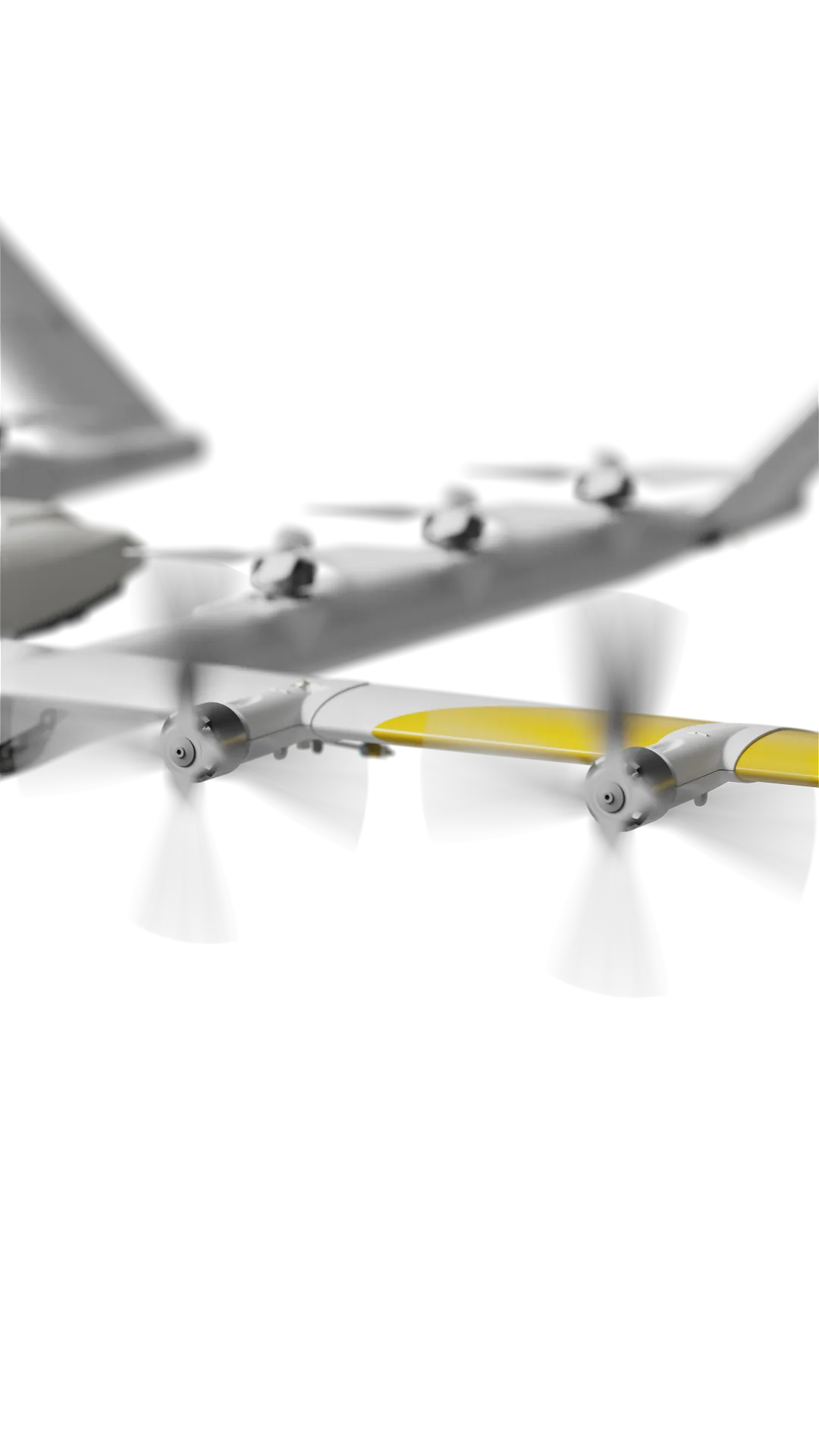
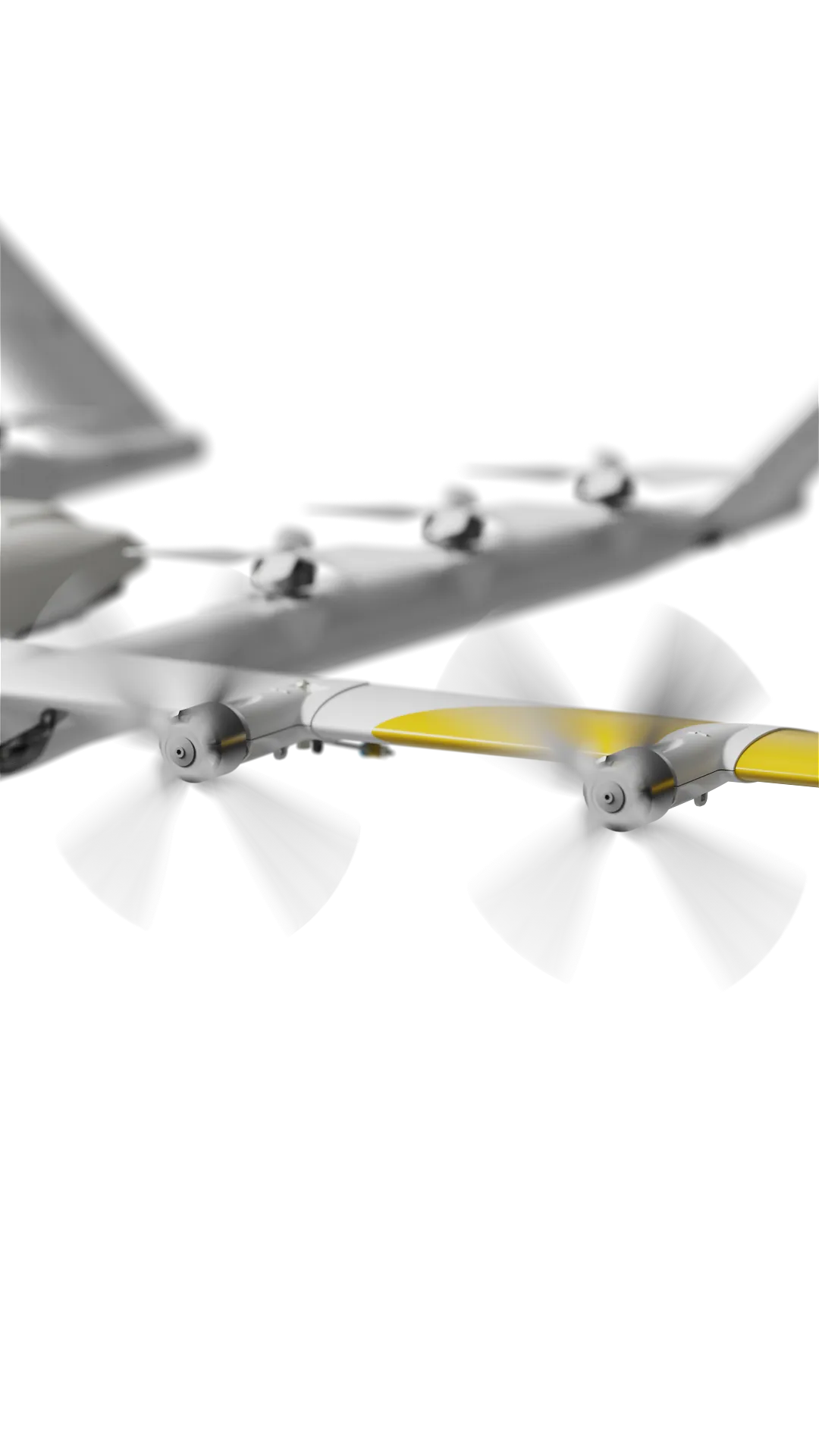
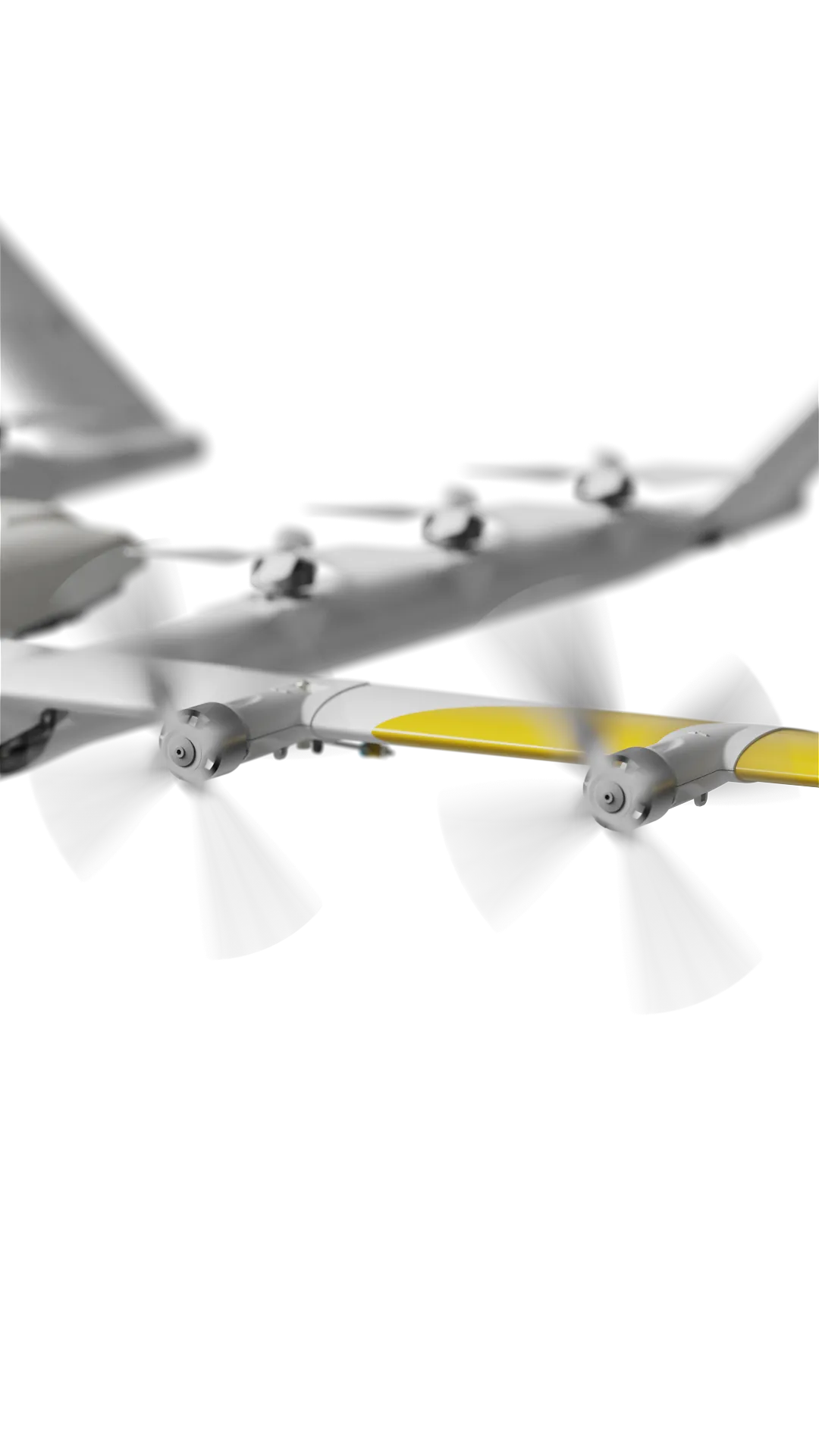
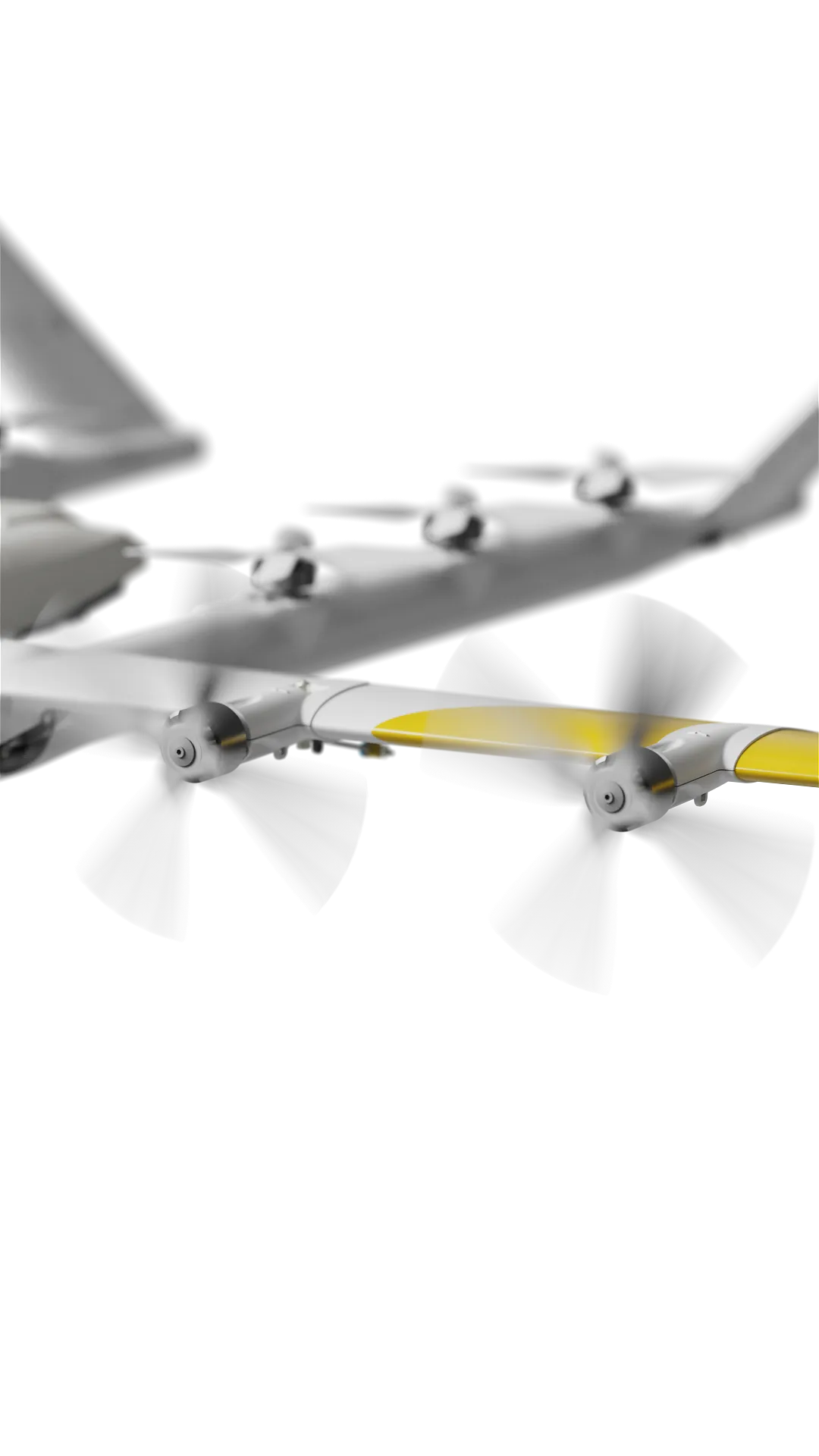
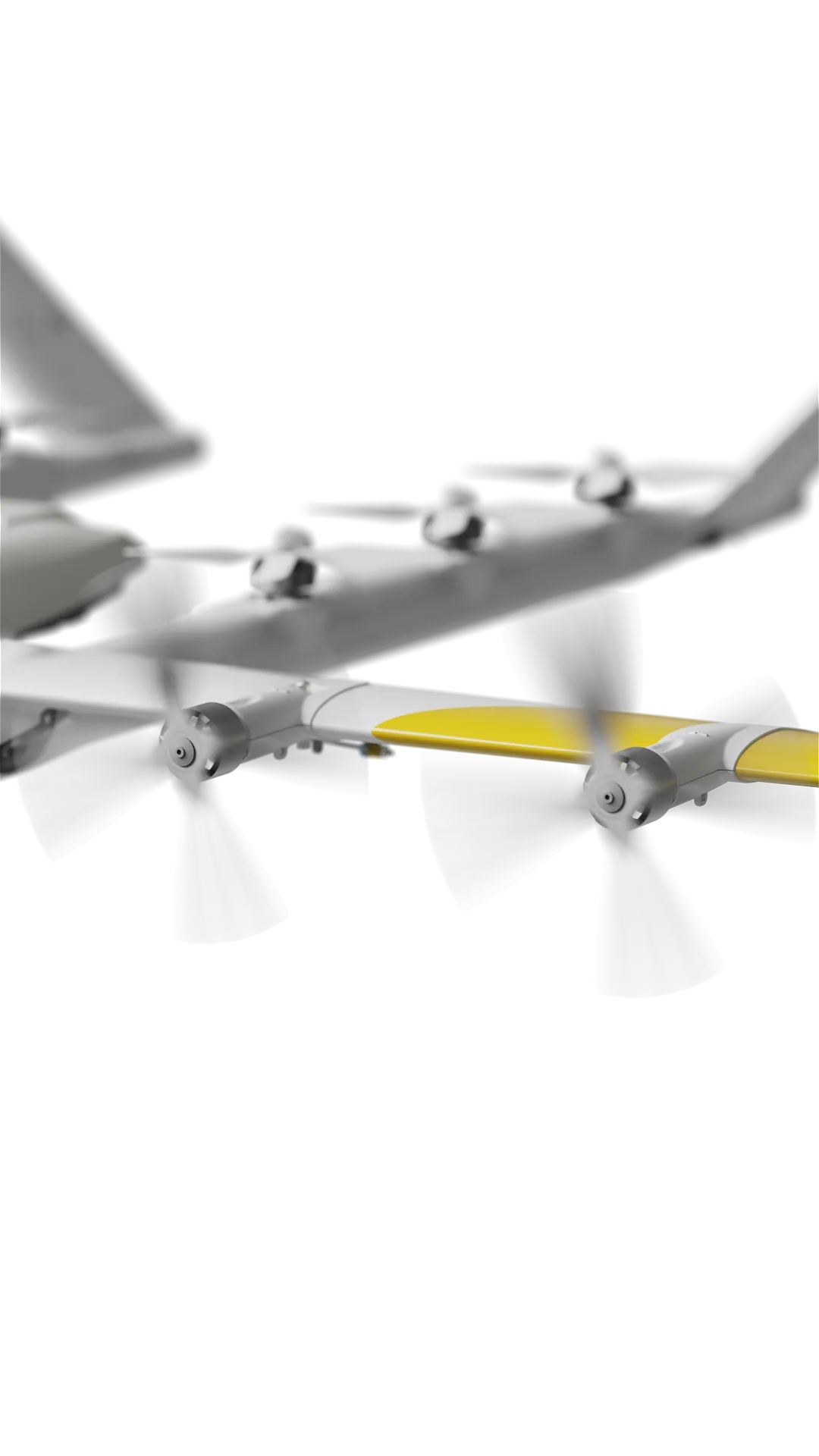
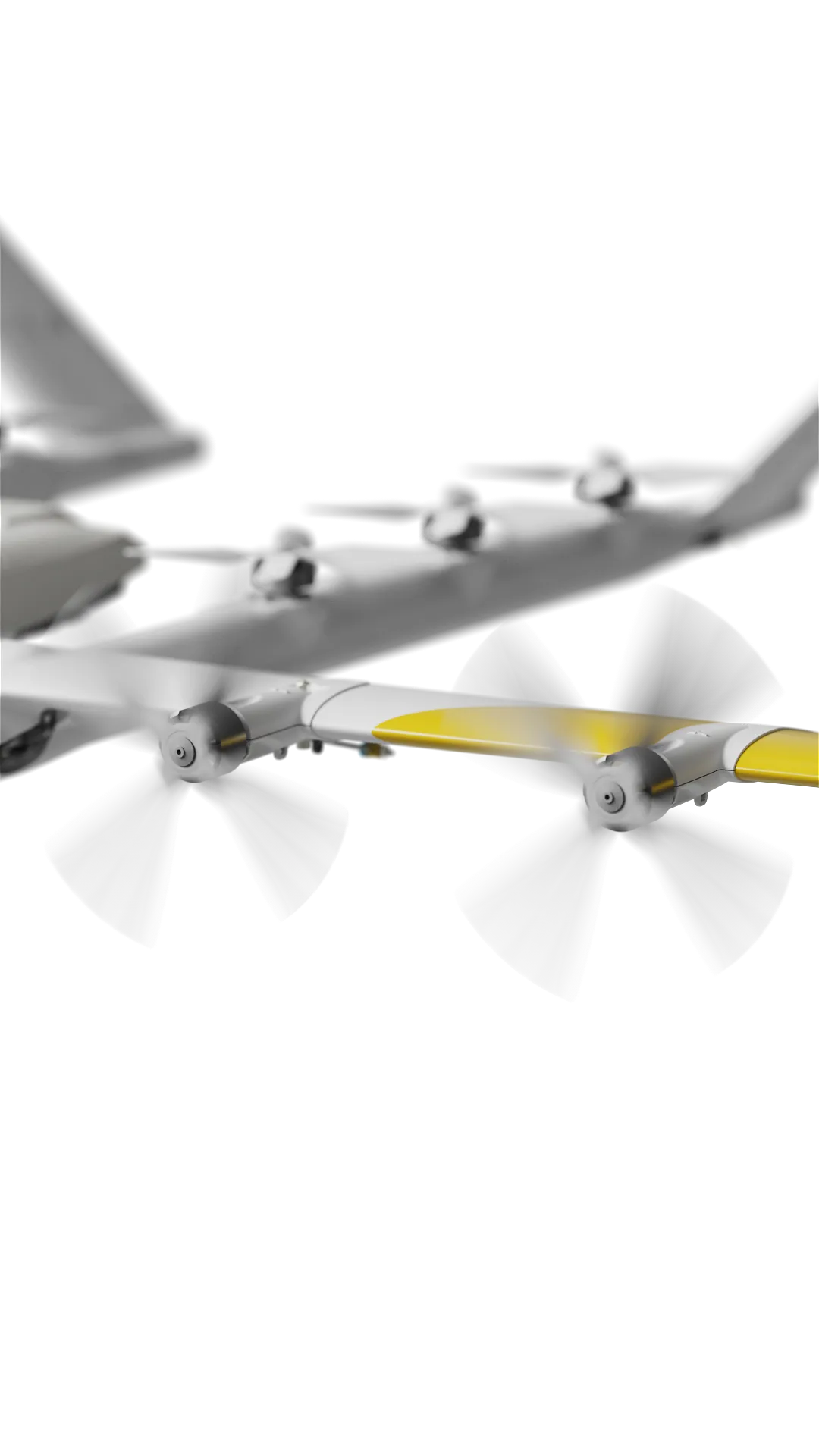
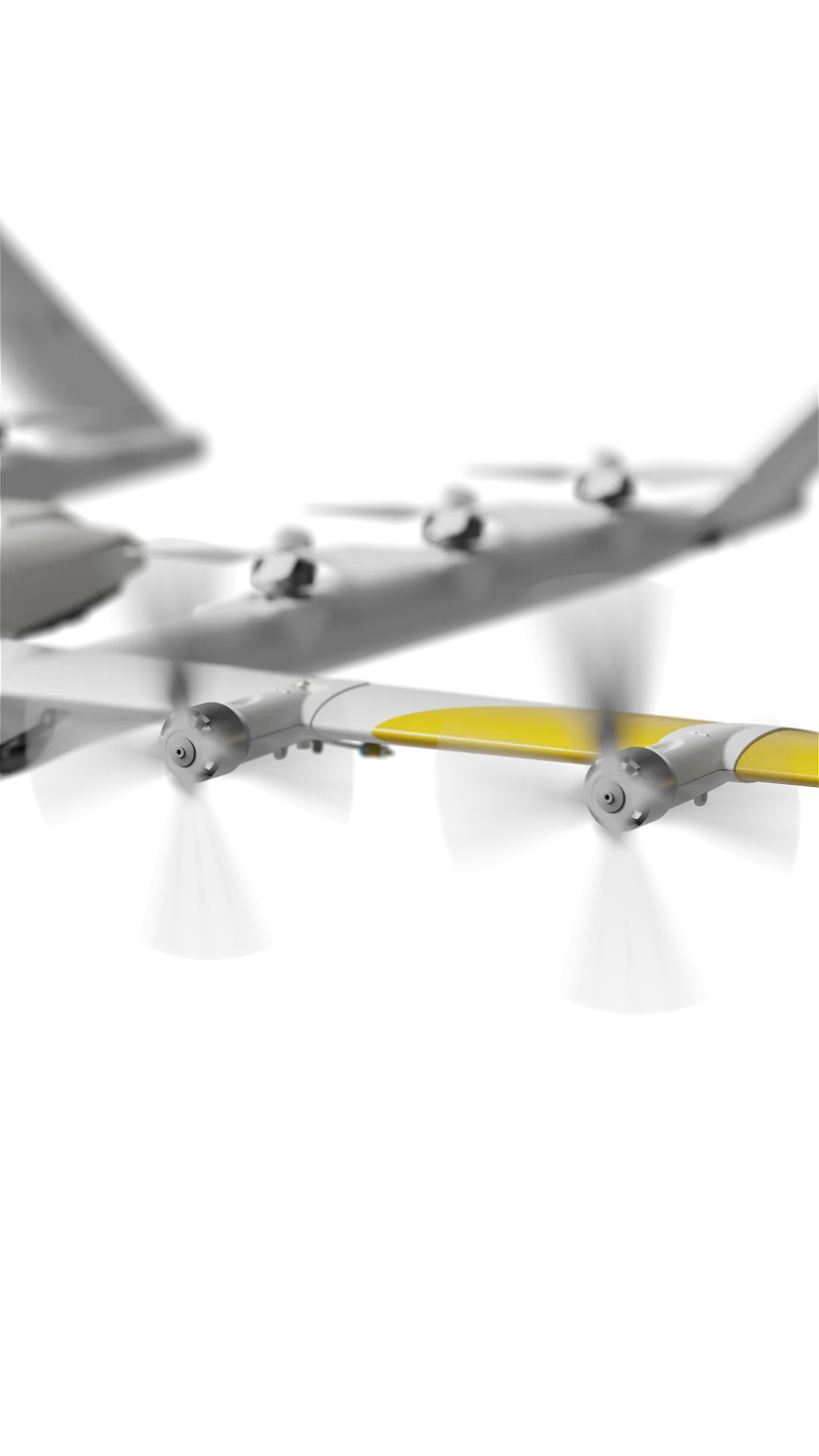
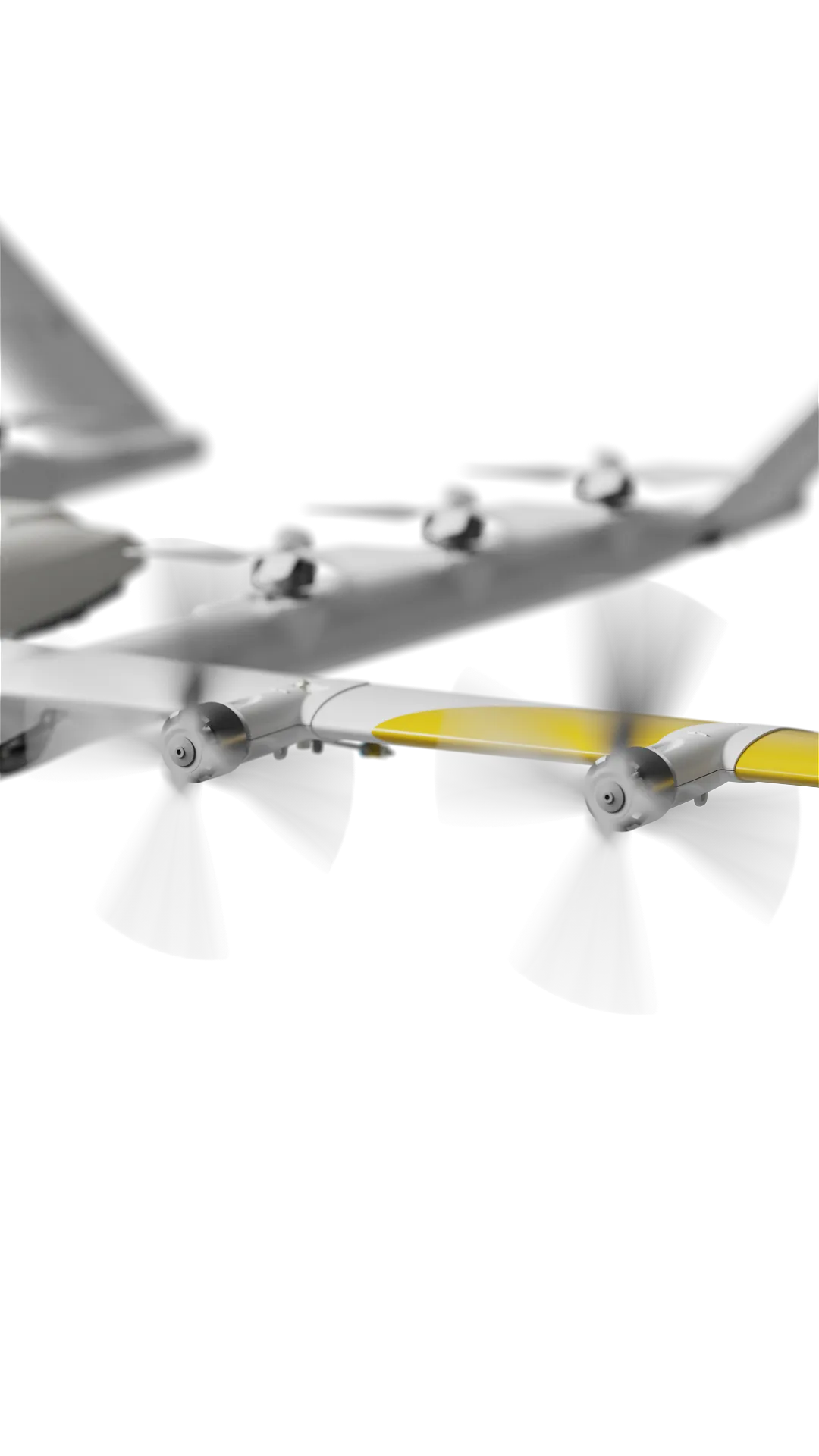
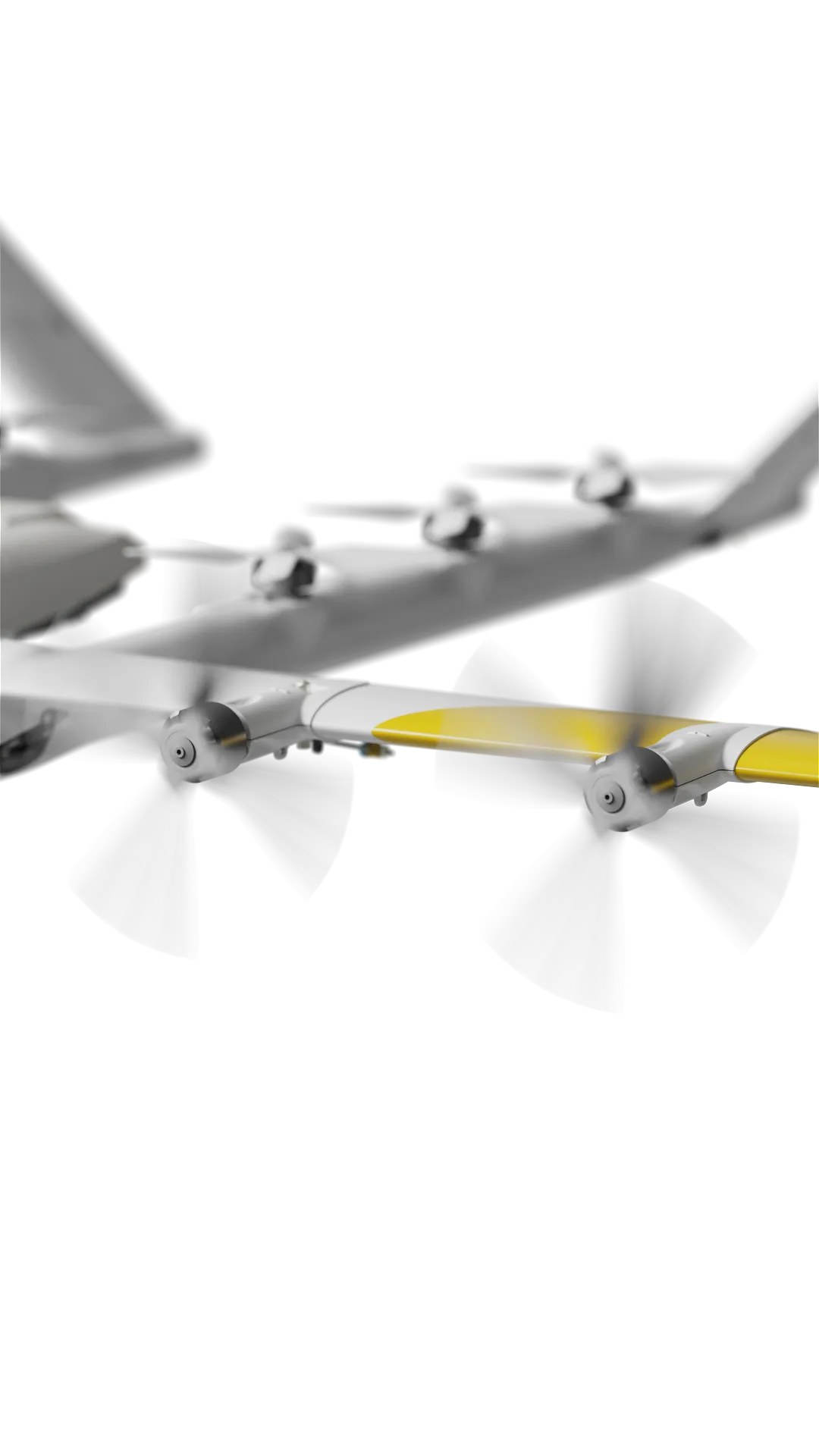
Our drones
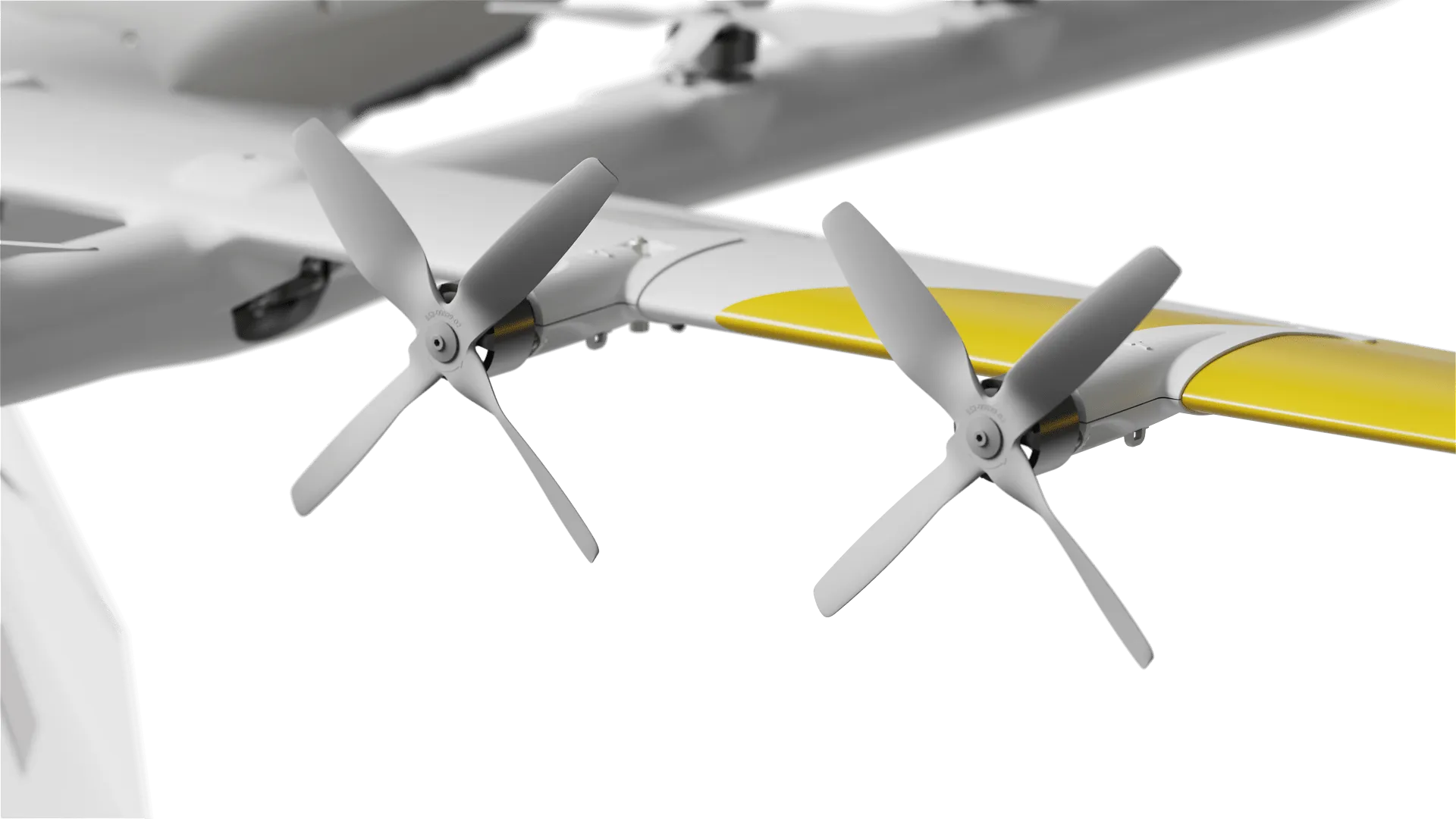
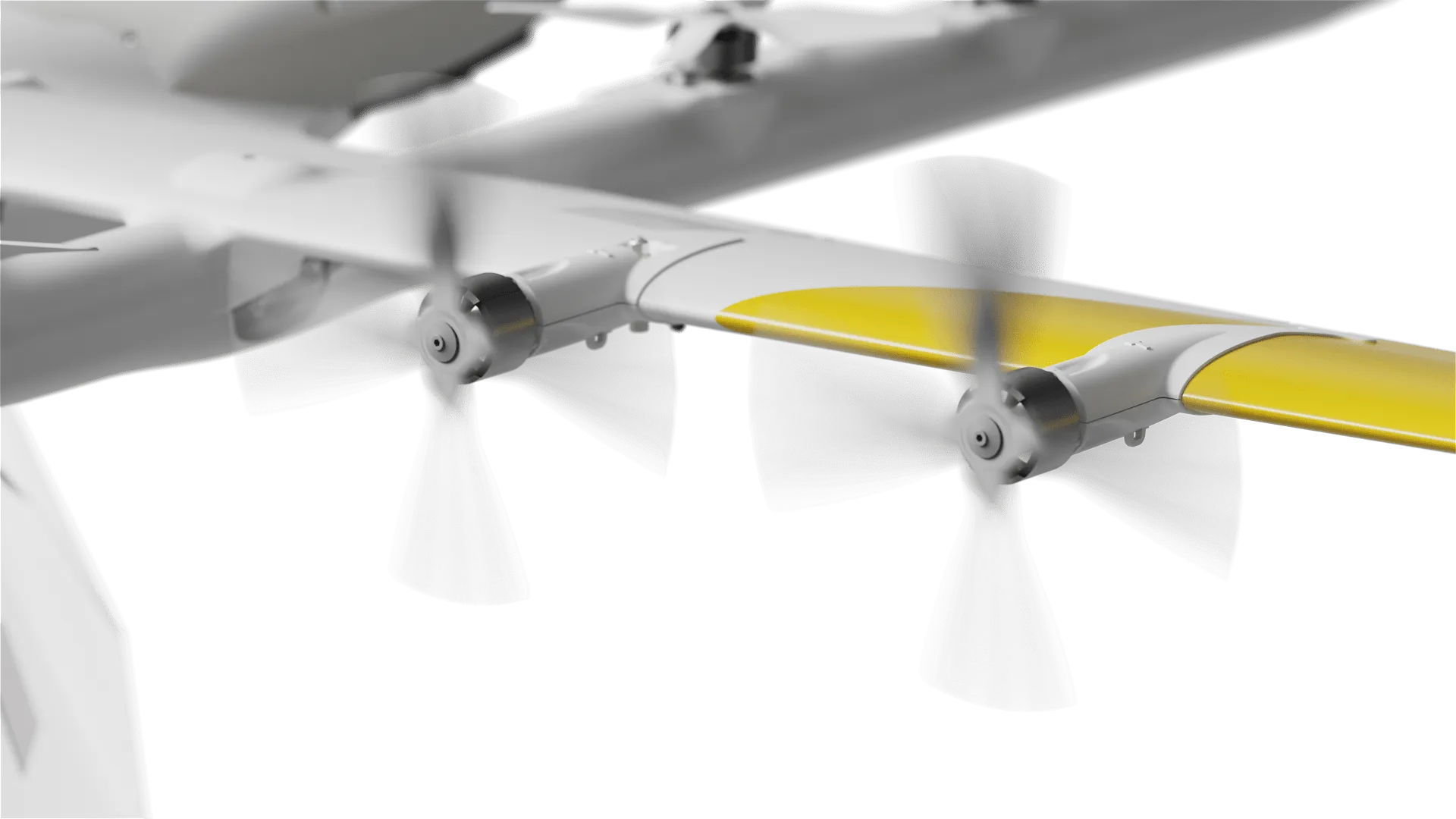
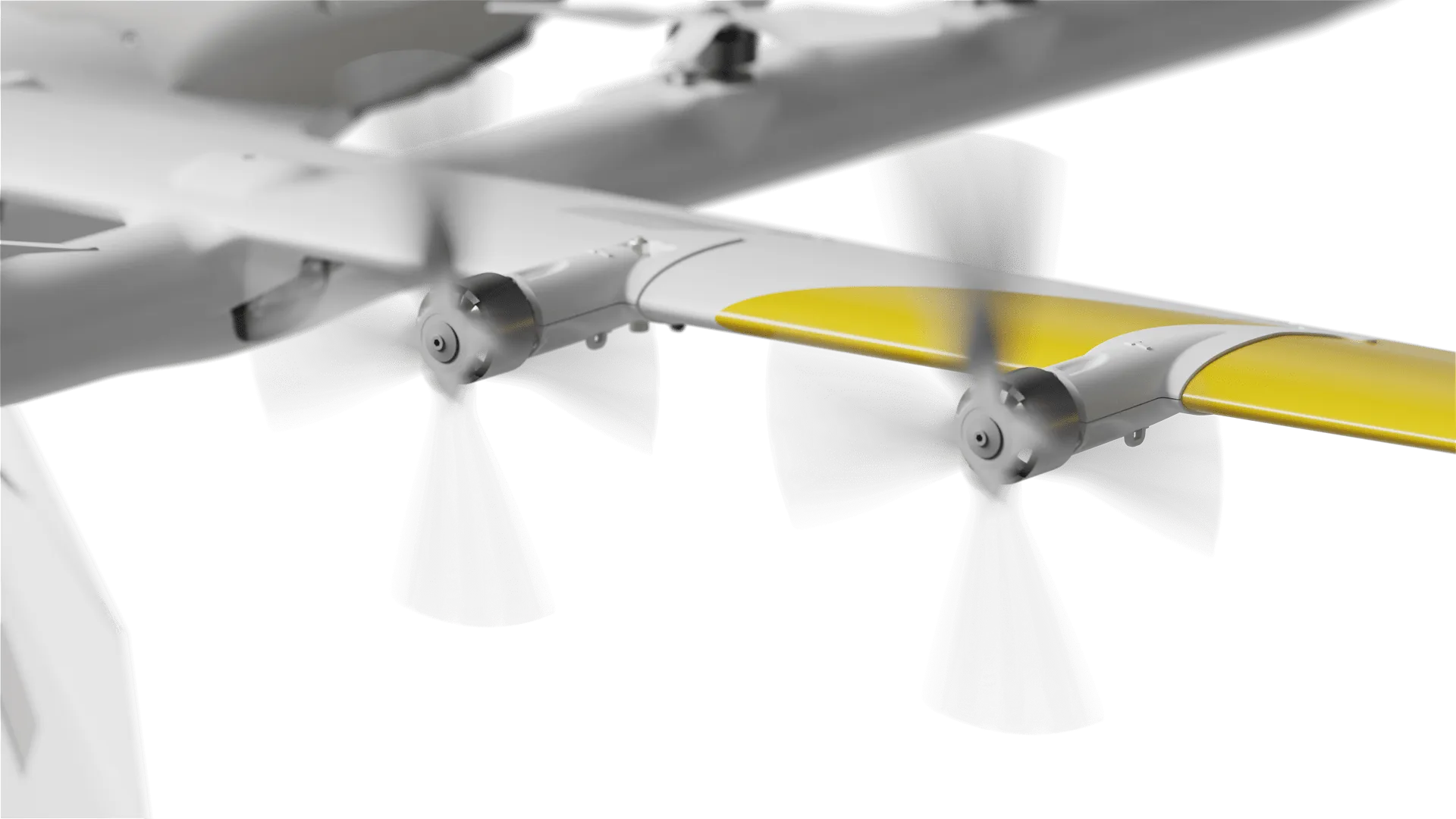
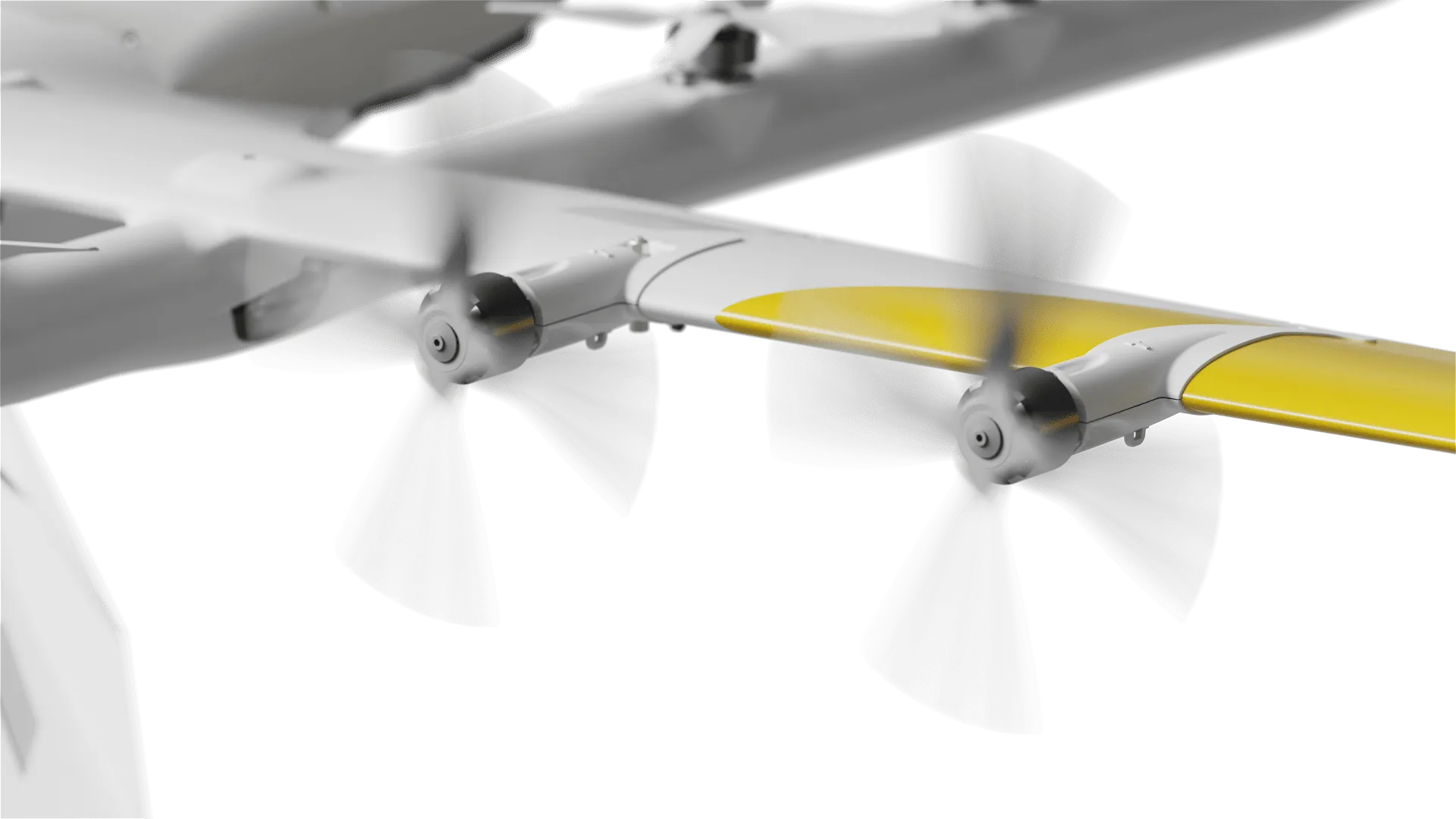
Wing's innovative design uses a unique dual-propulsion system. Vertical lift motors enable precision takeoff, delivery, and landing. Separate cruise motors optimize efficiency for long-range delivery.
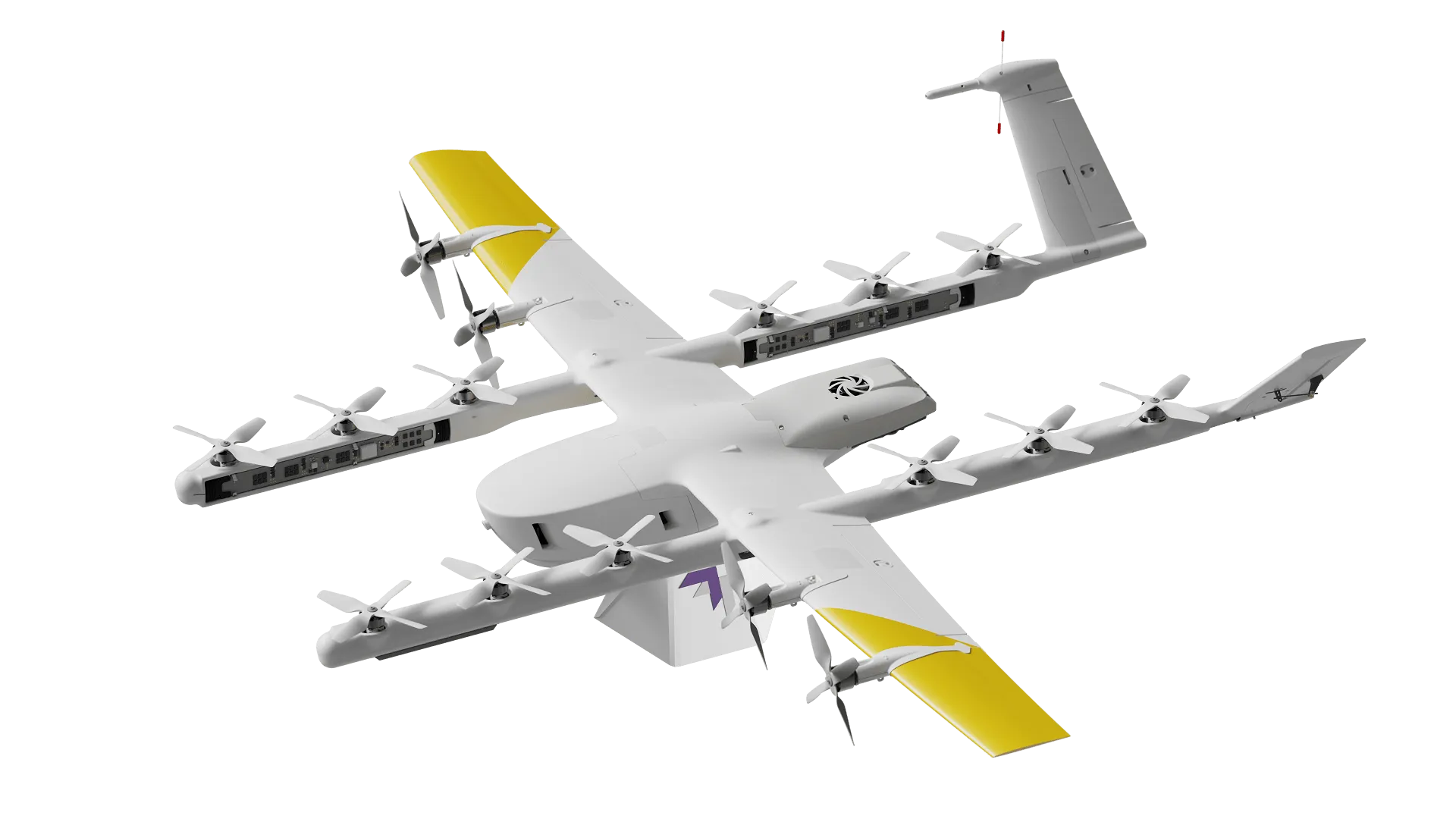
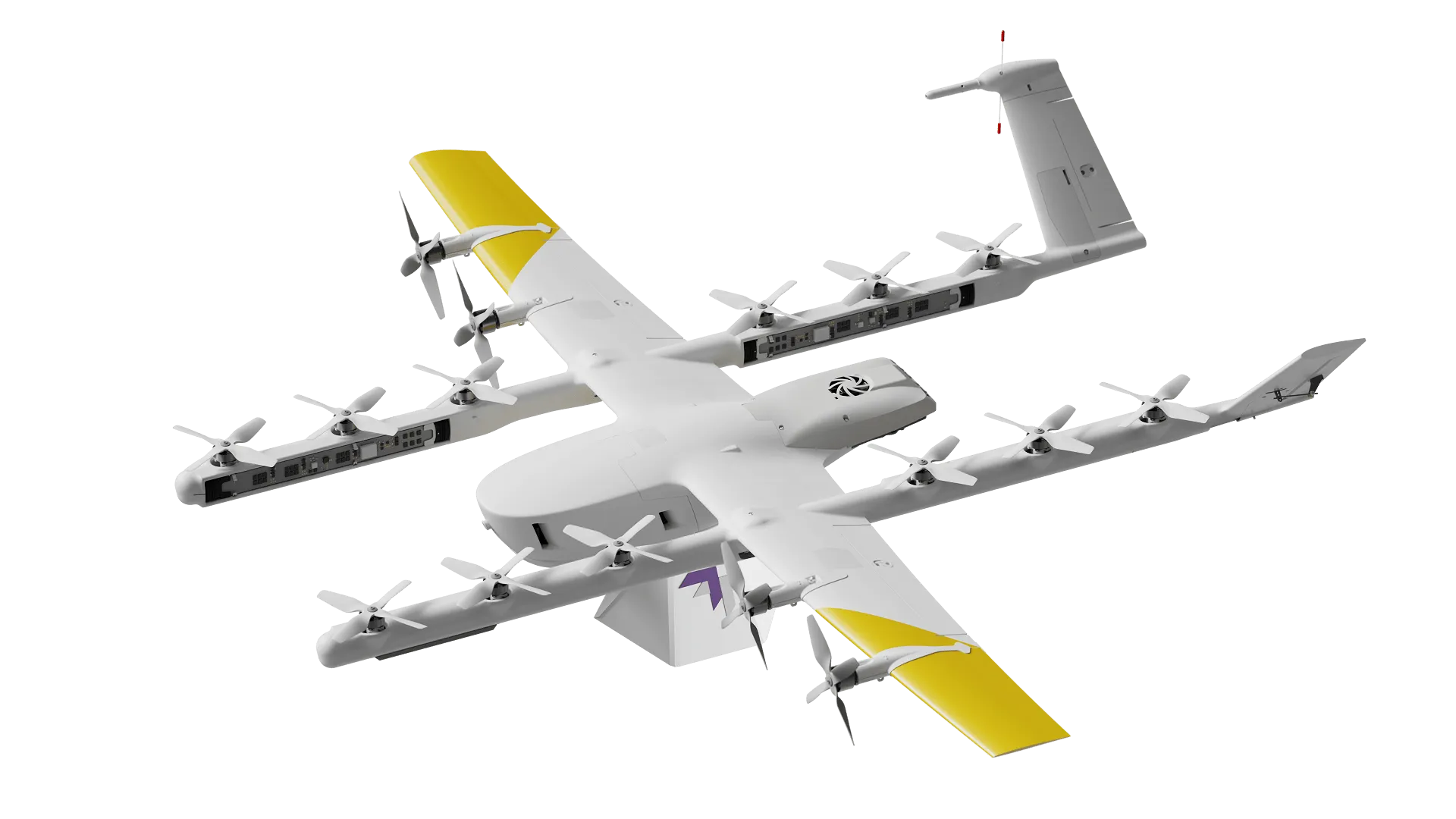
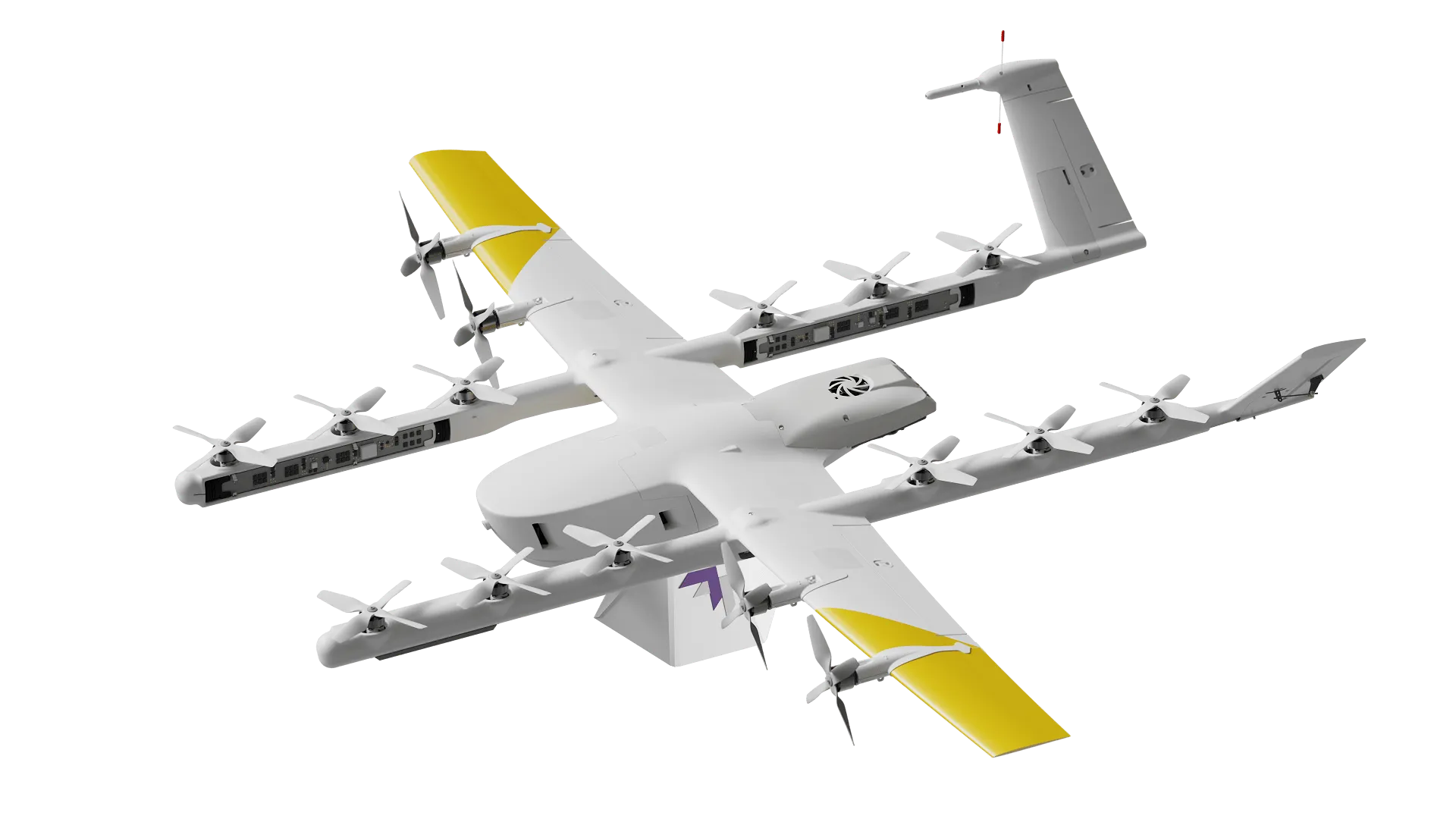
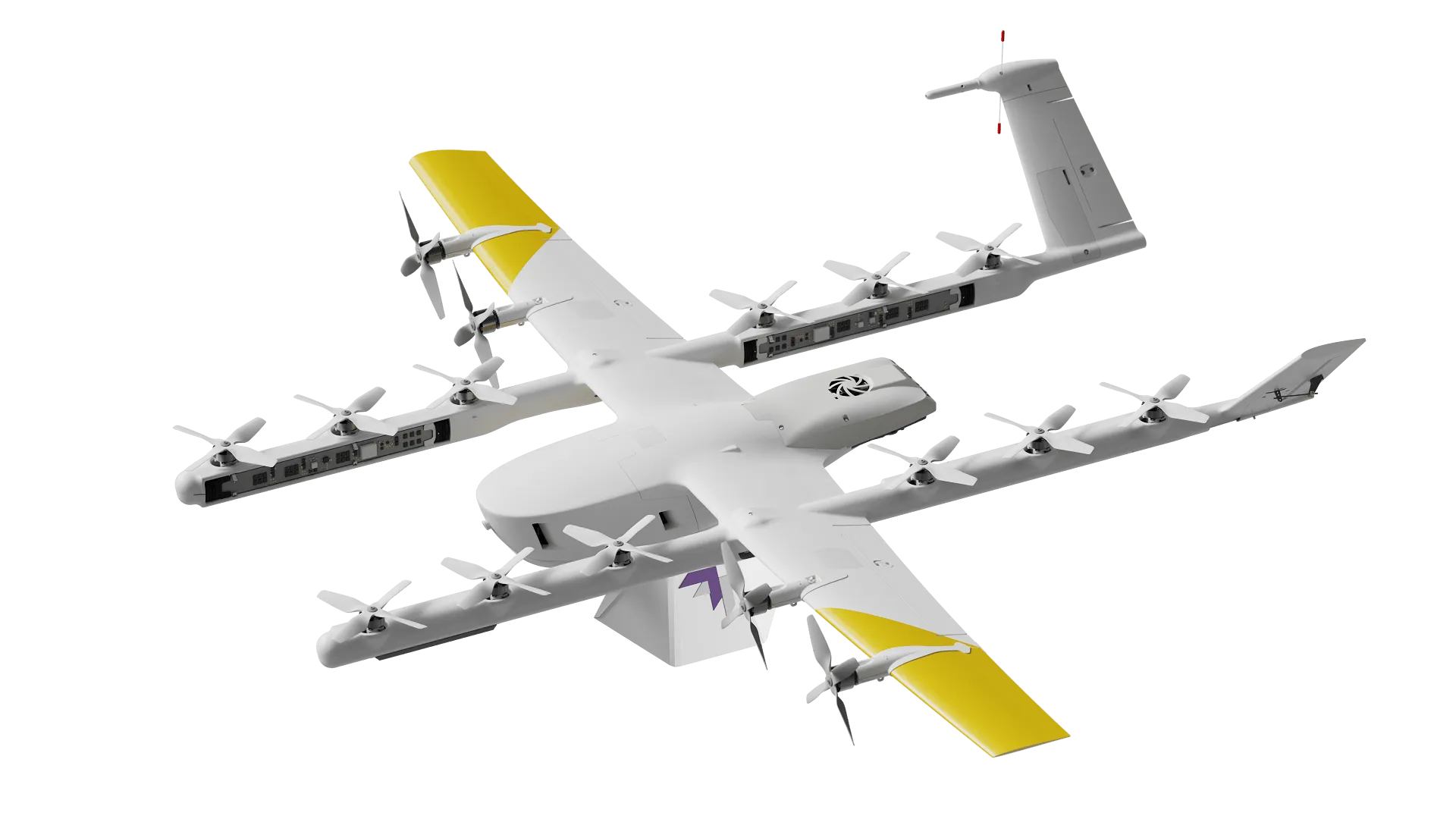
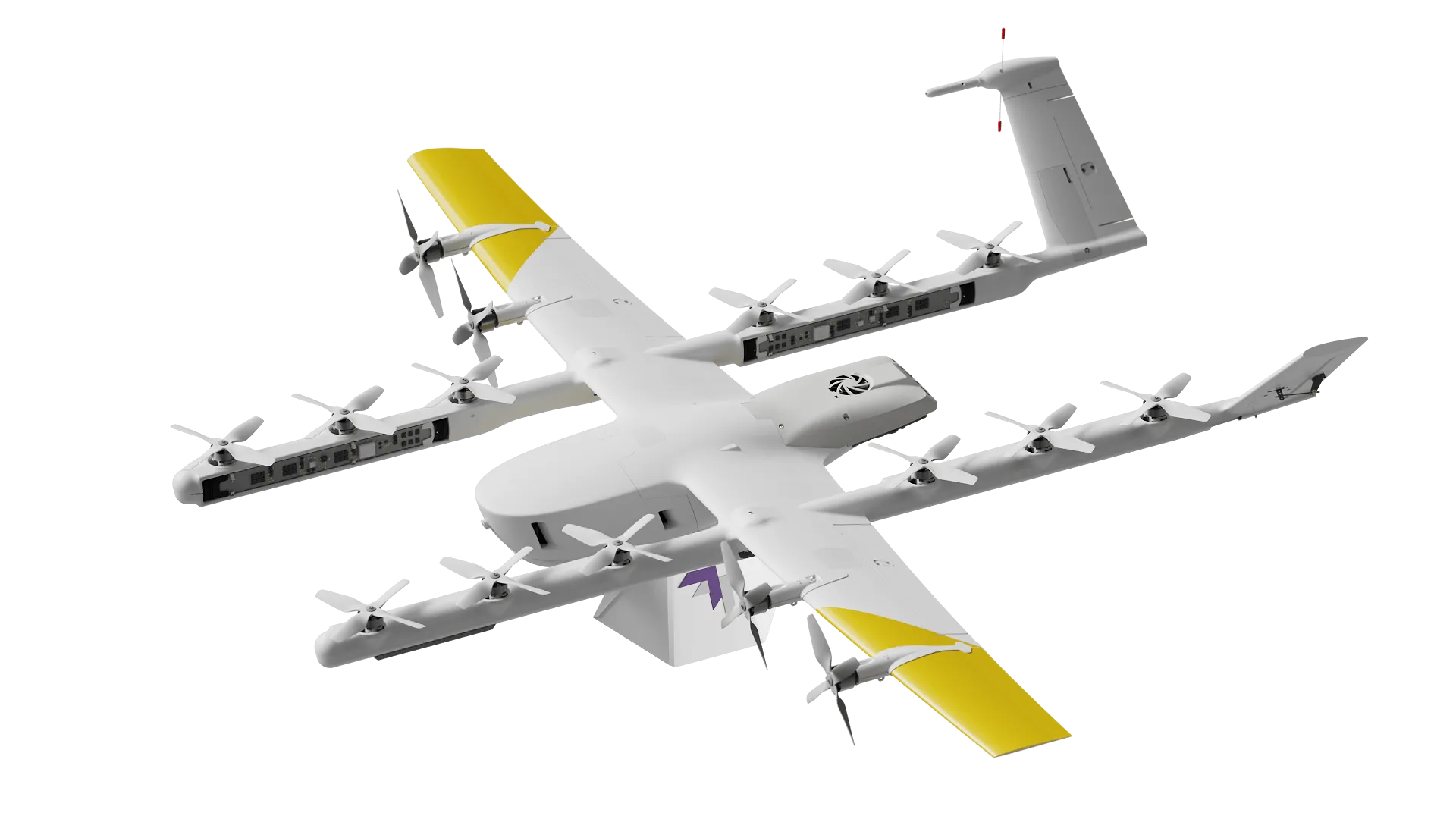
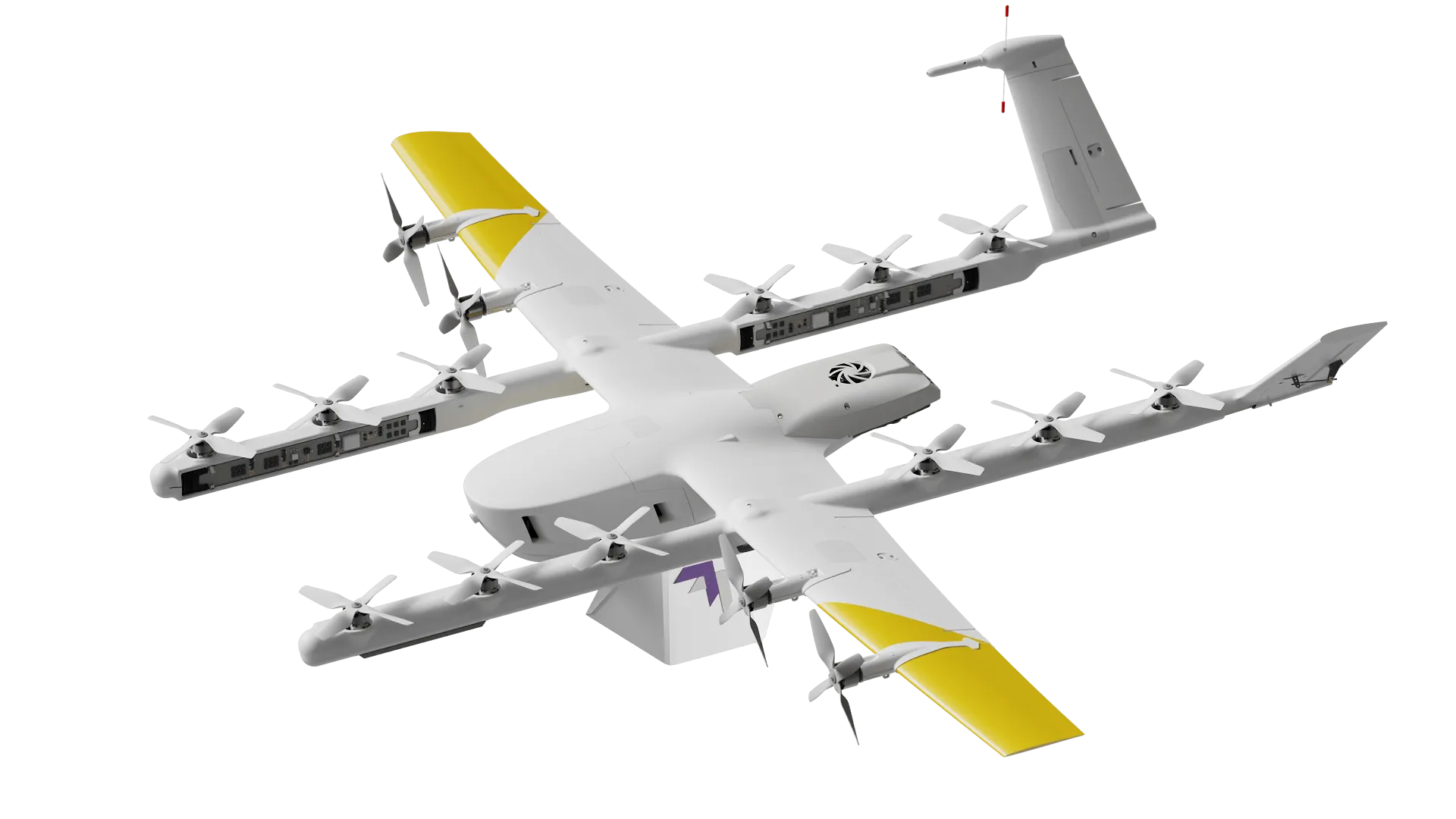
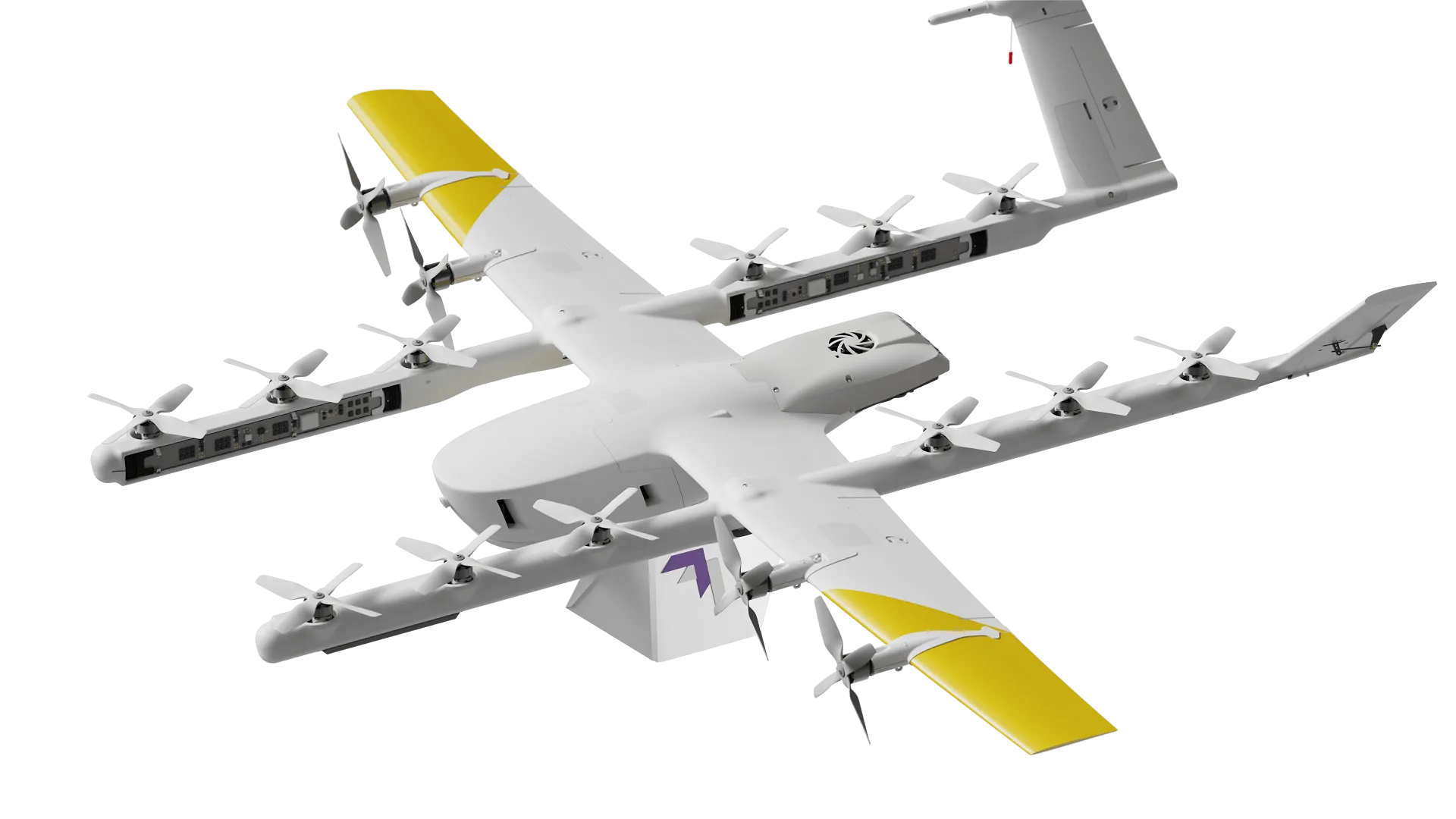
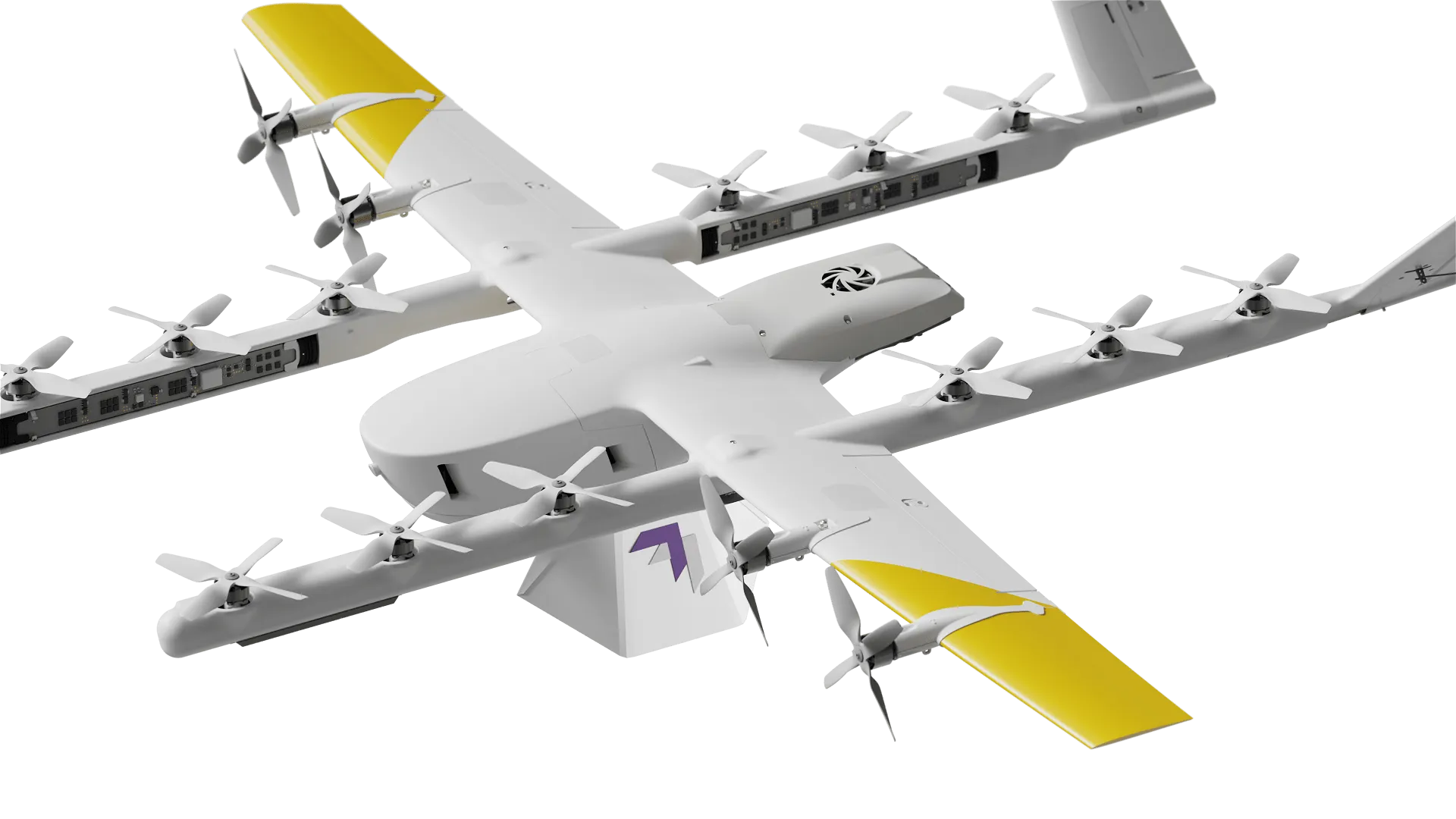
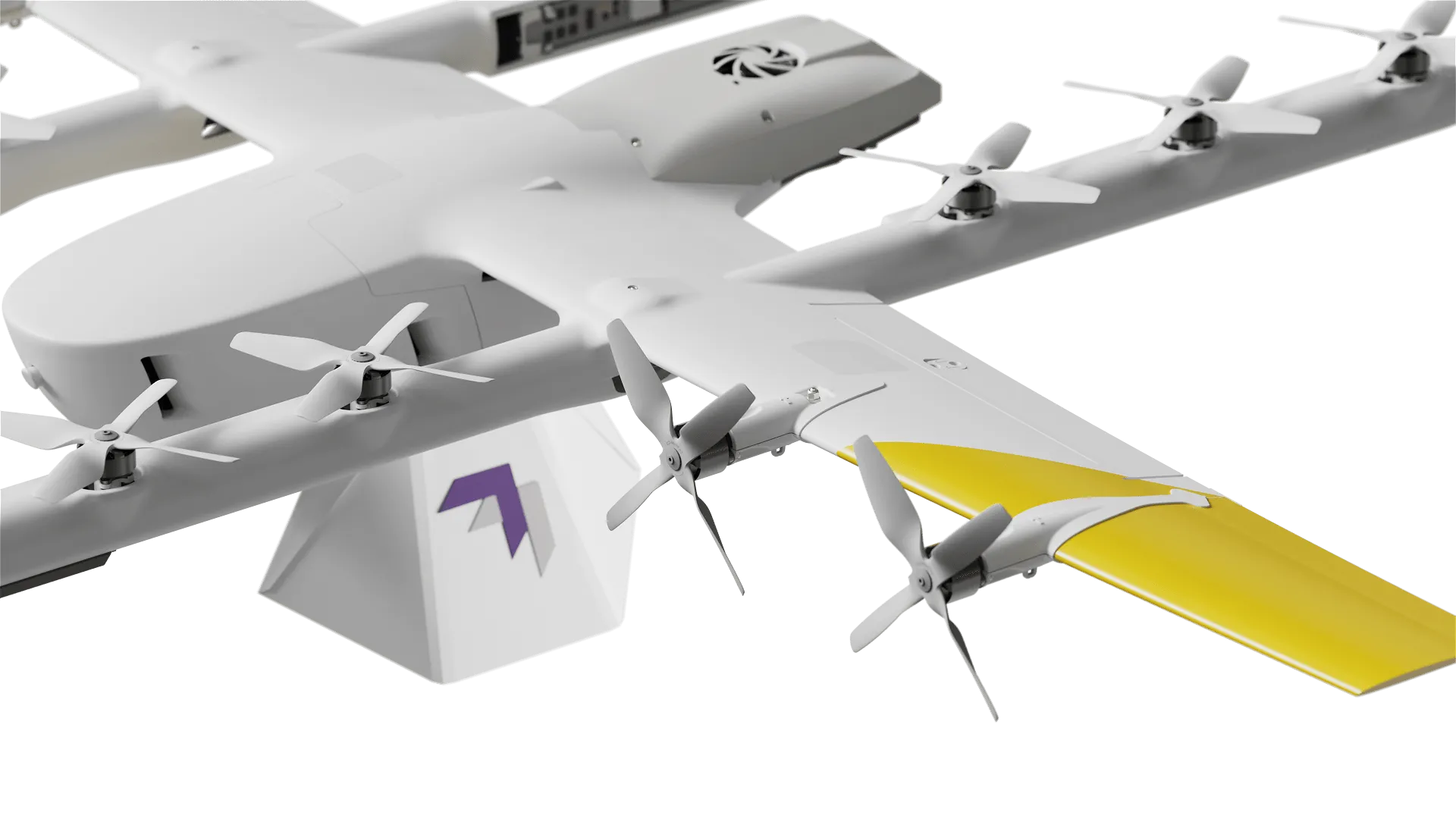
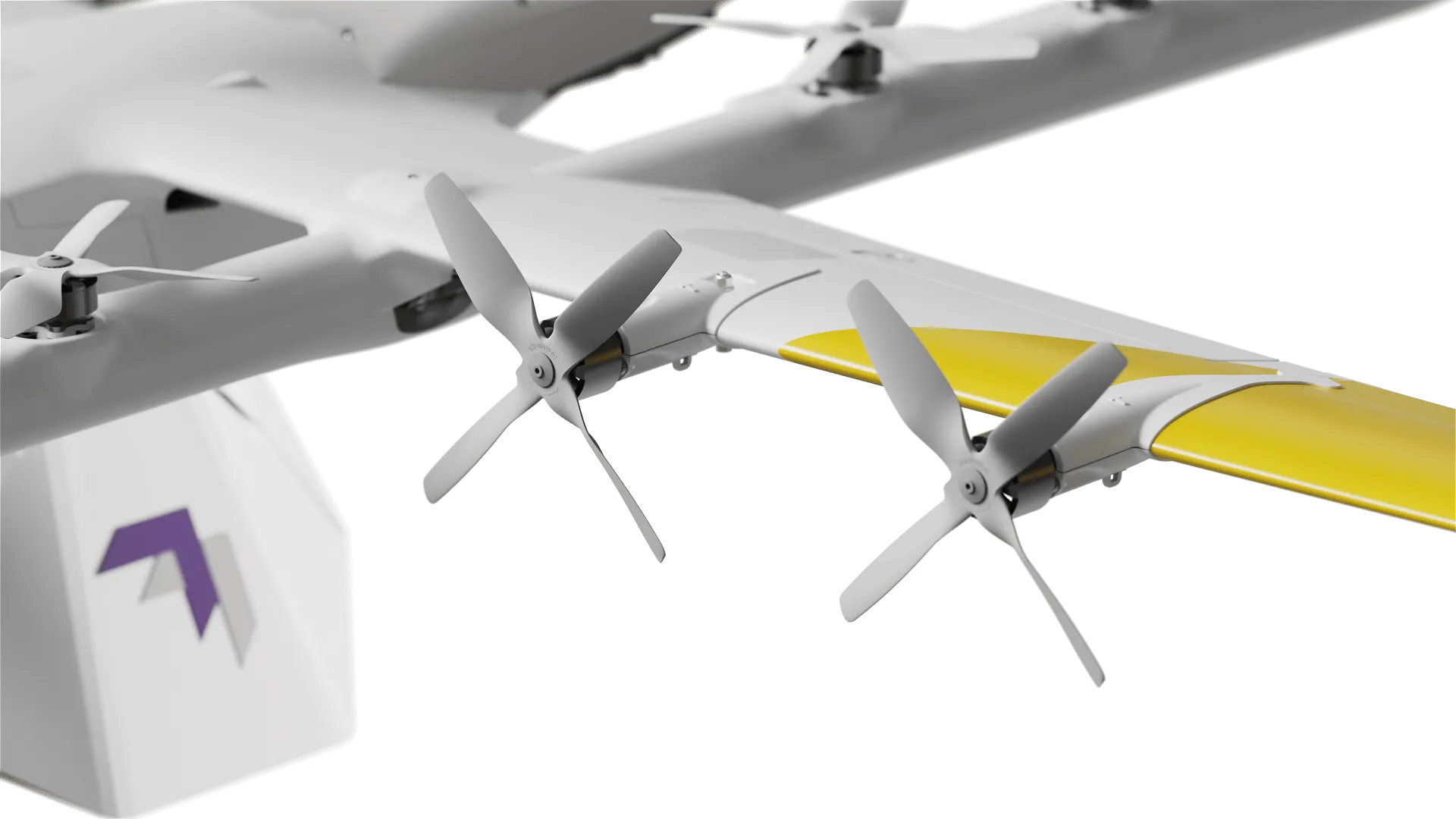
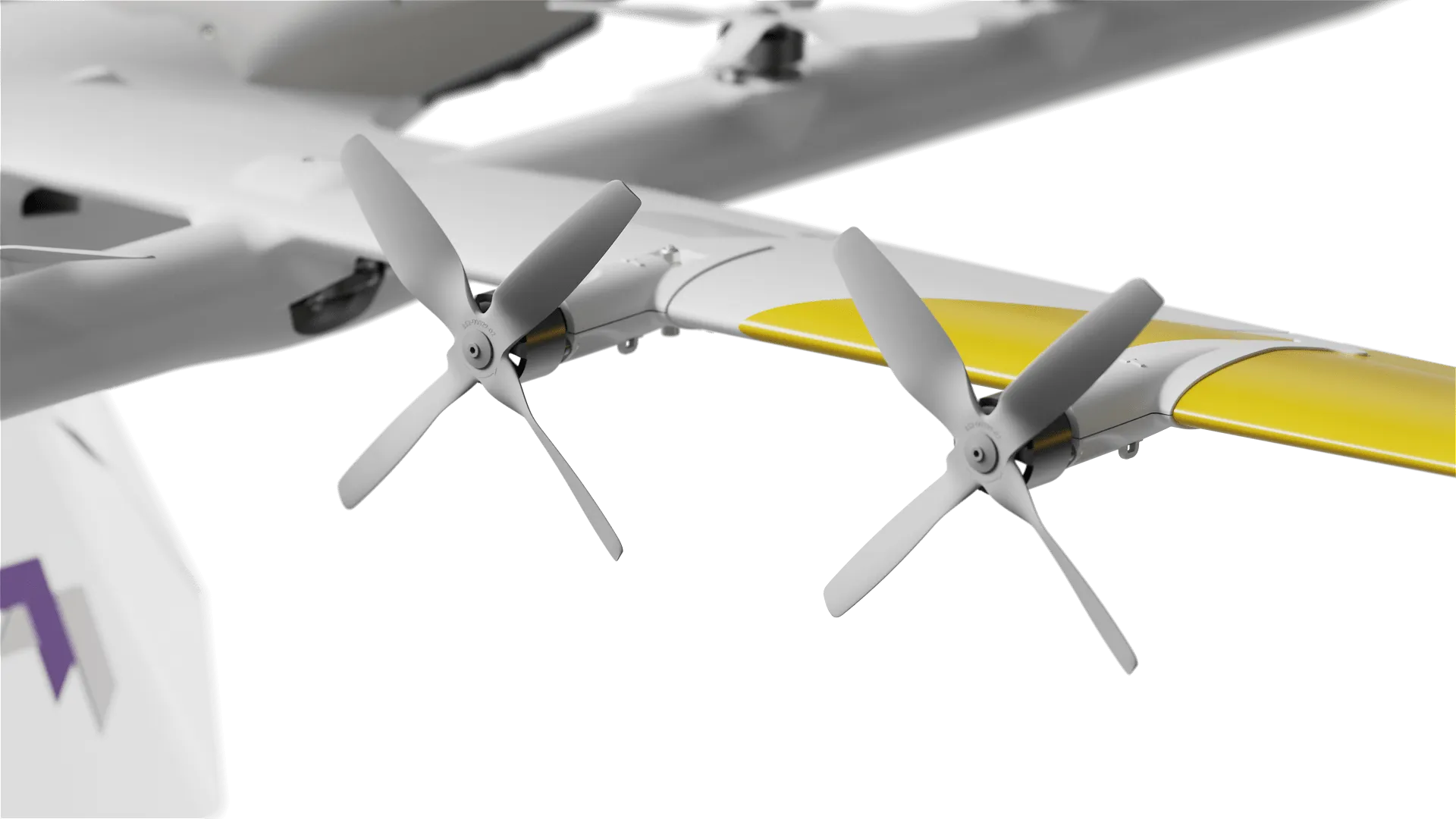
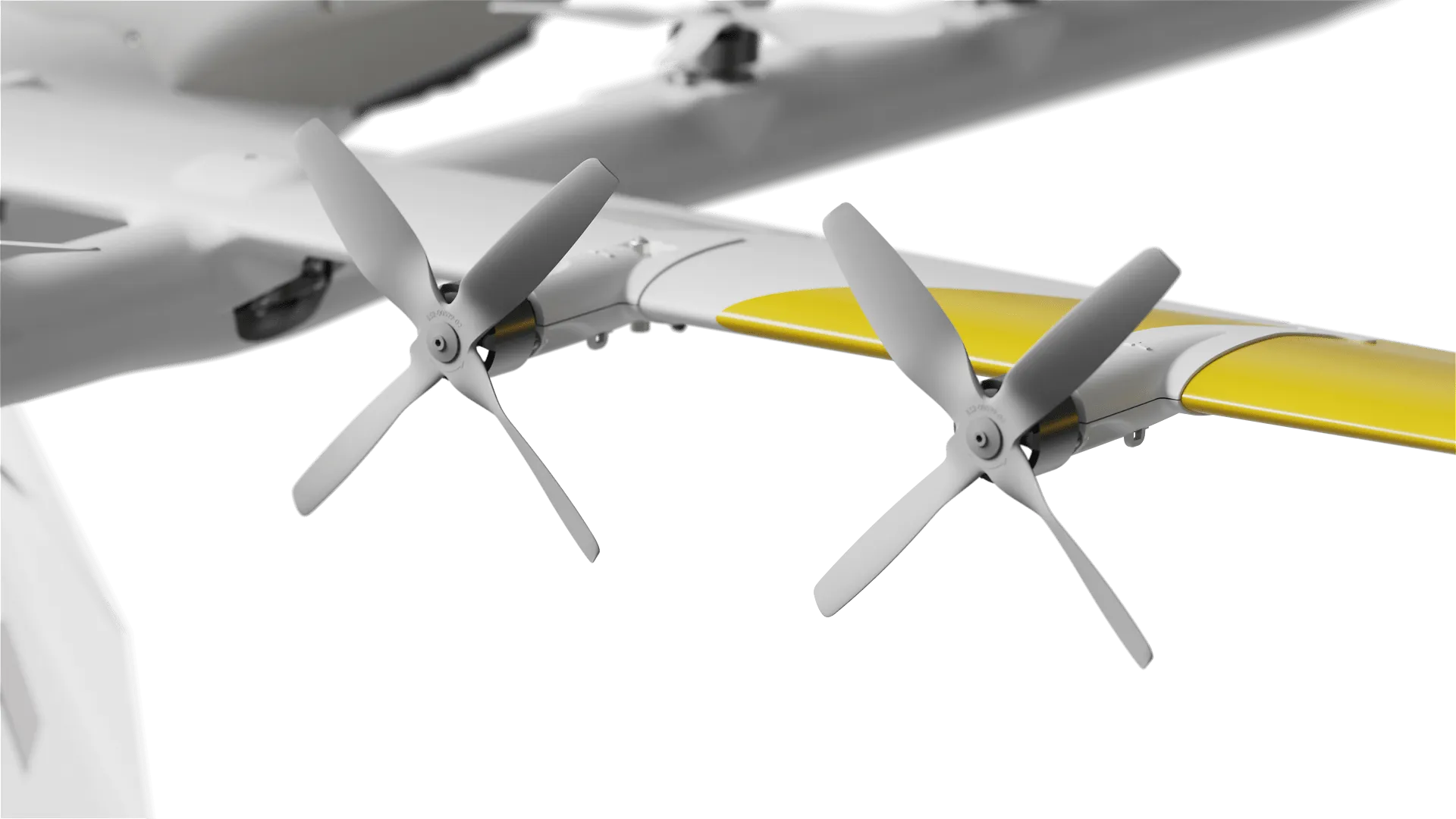
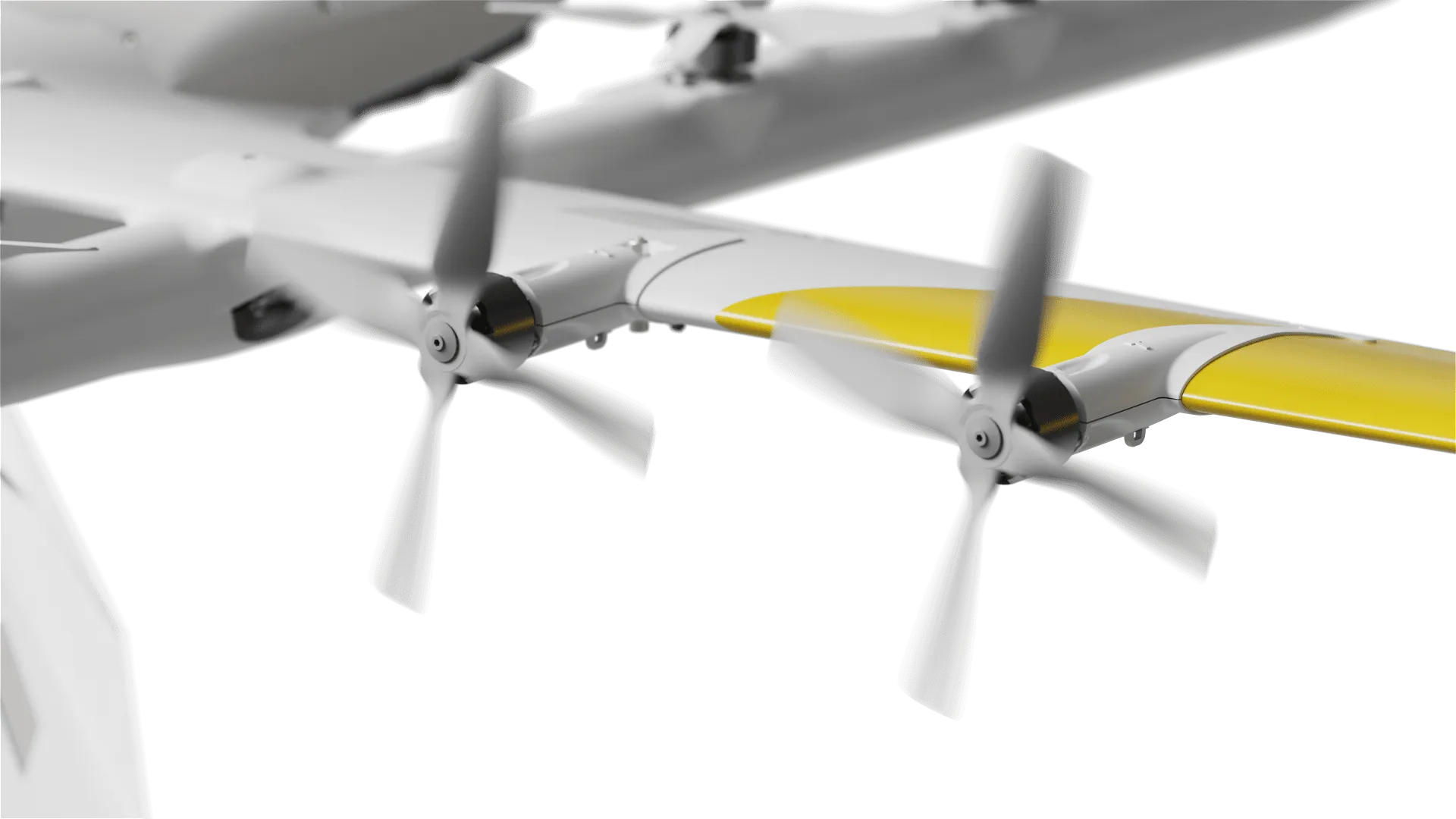
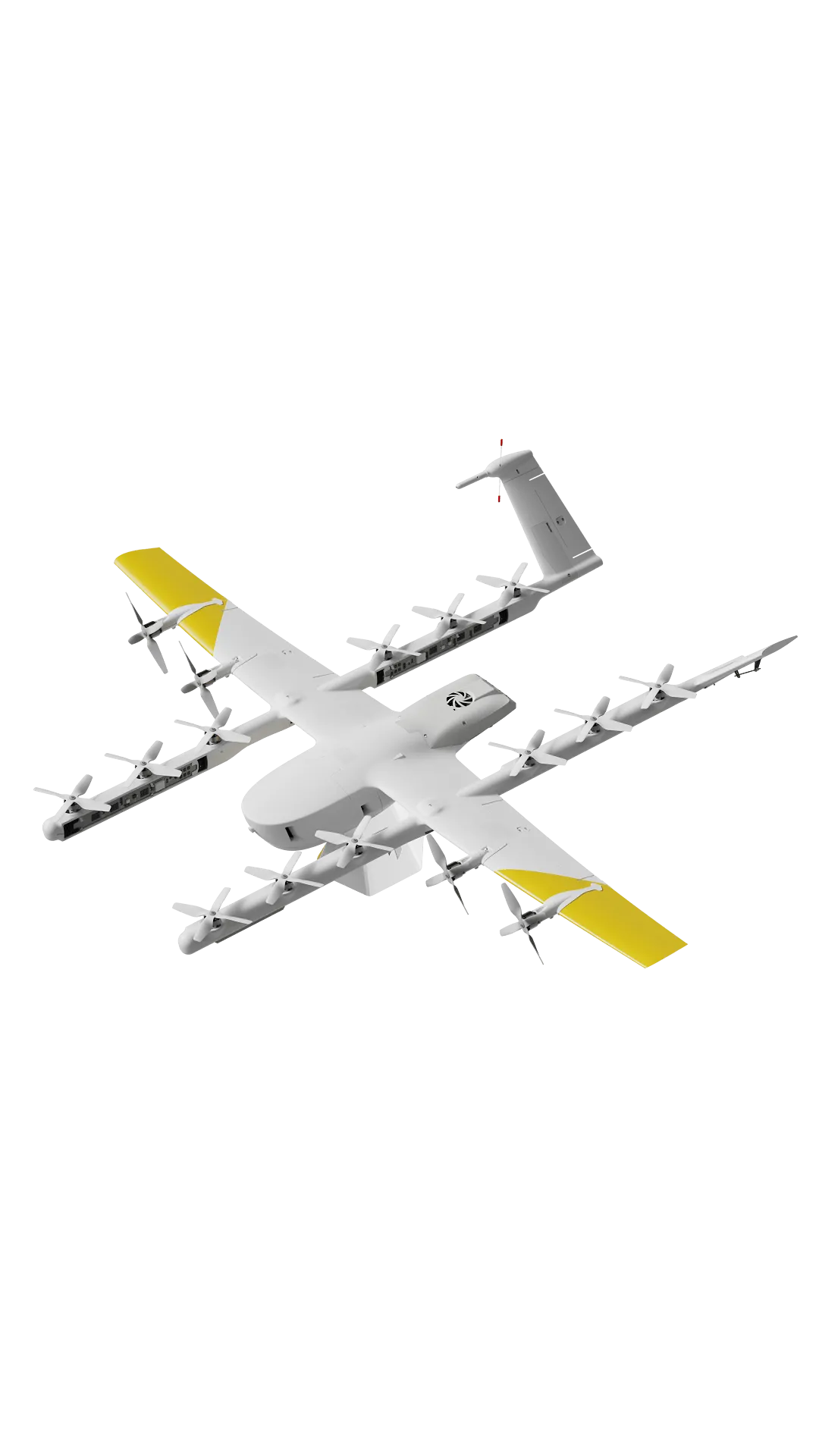
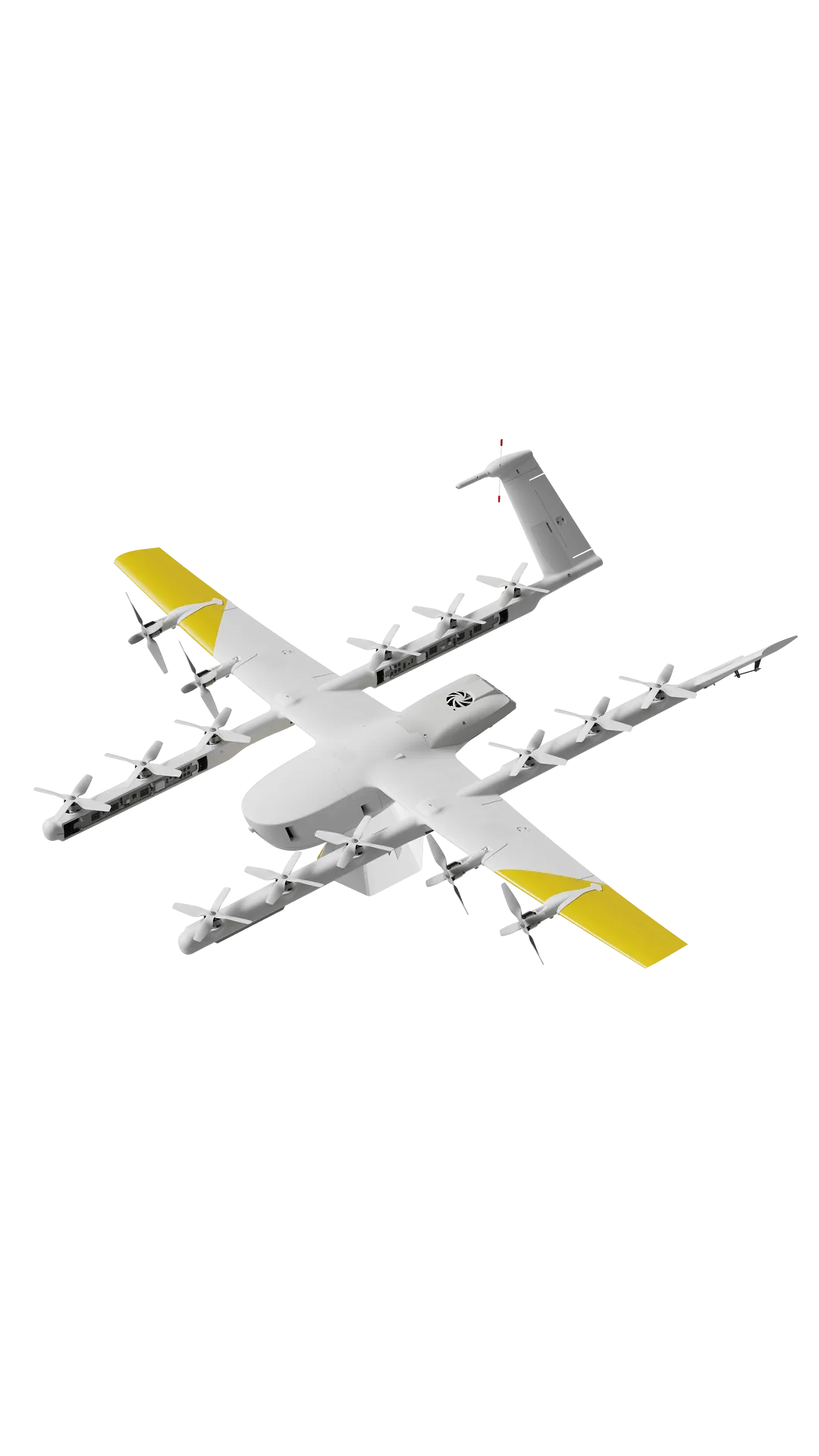
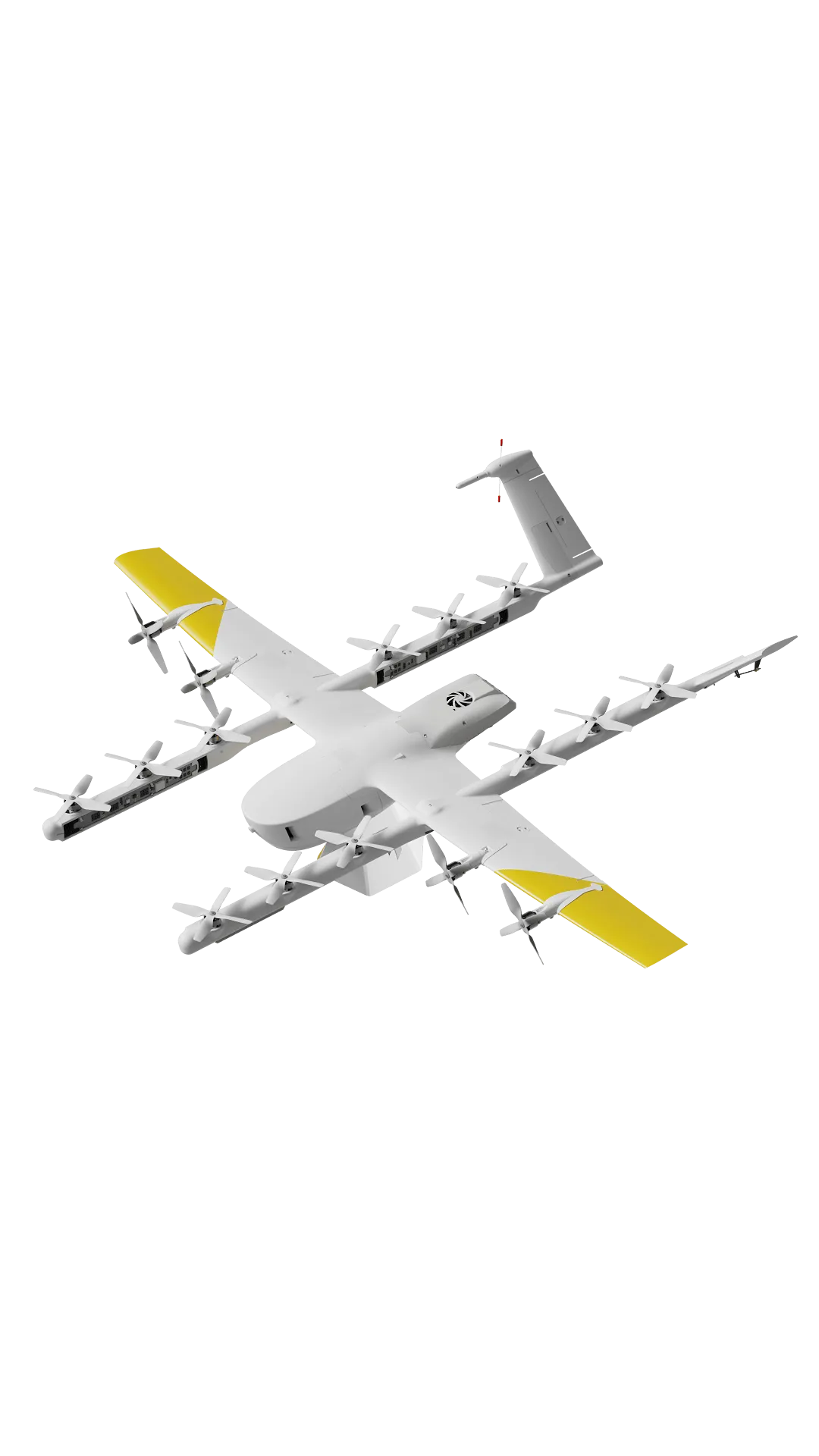
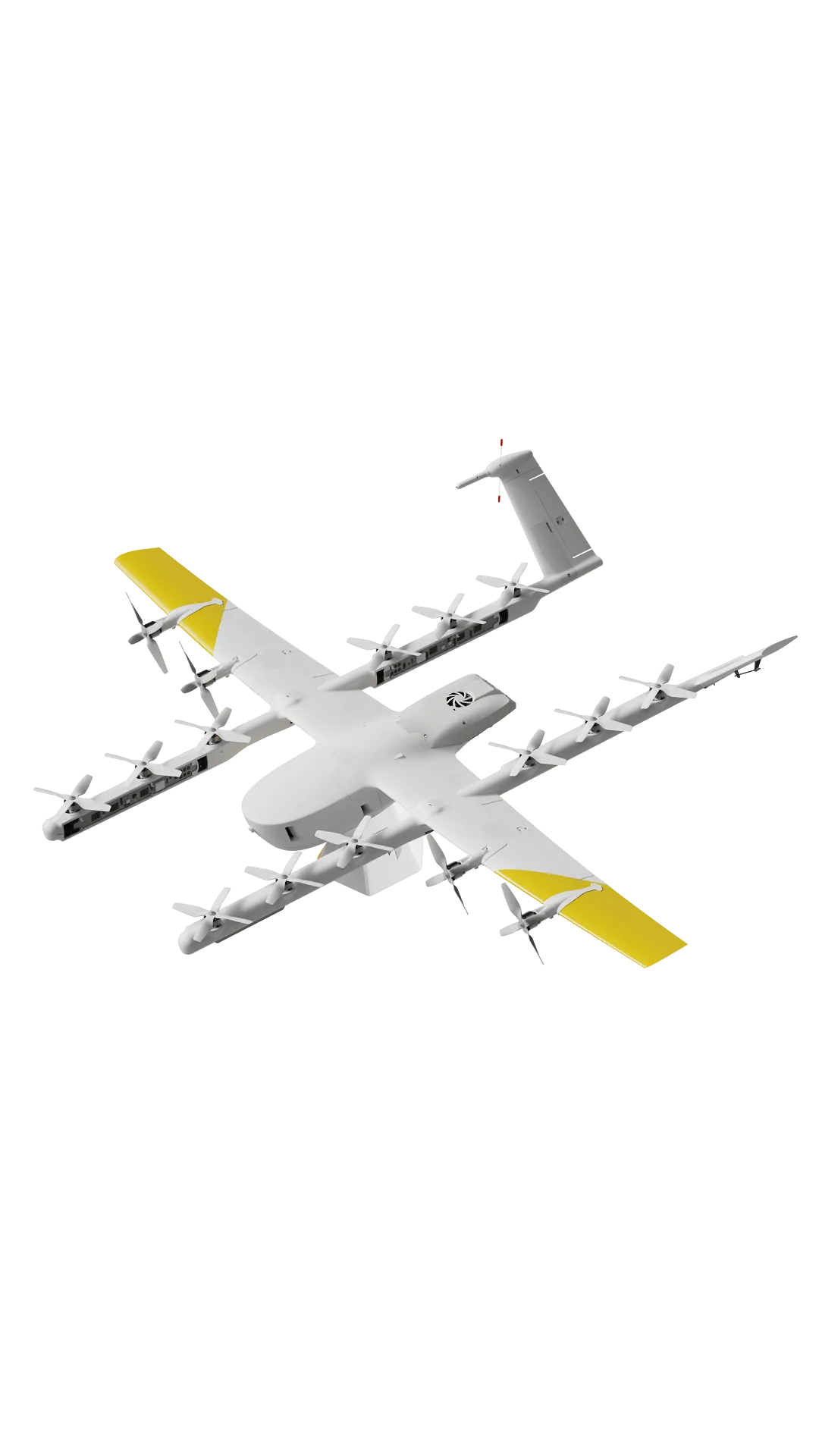
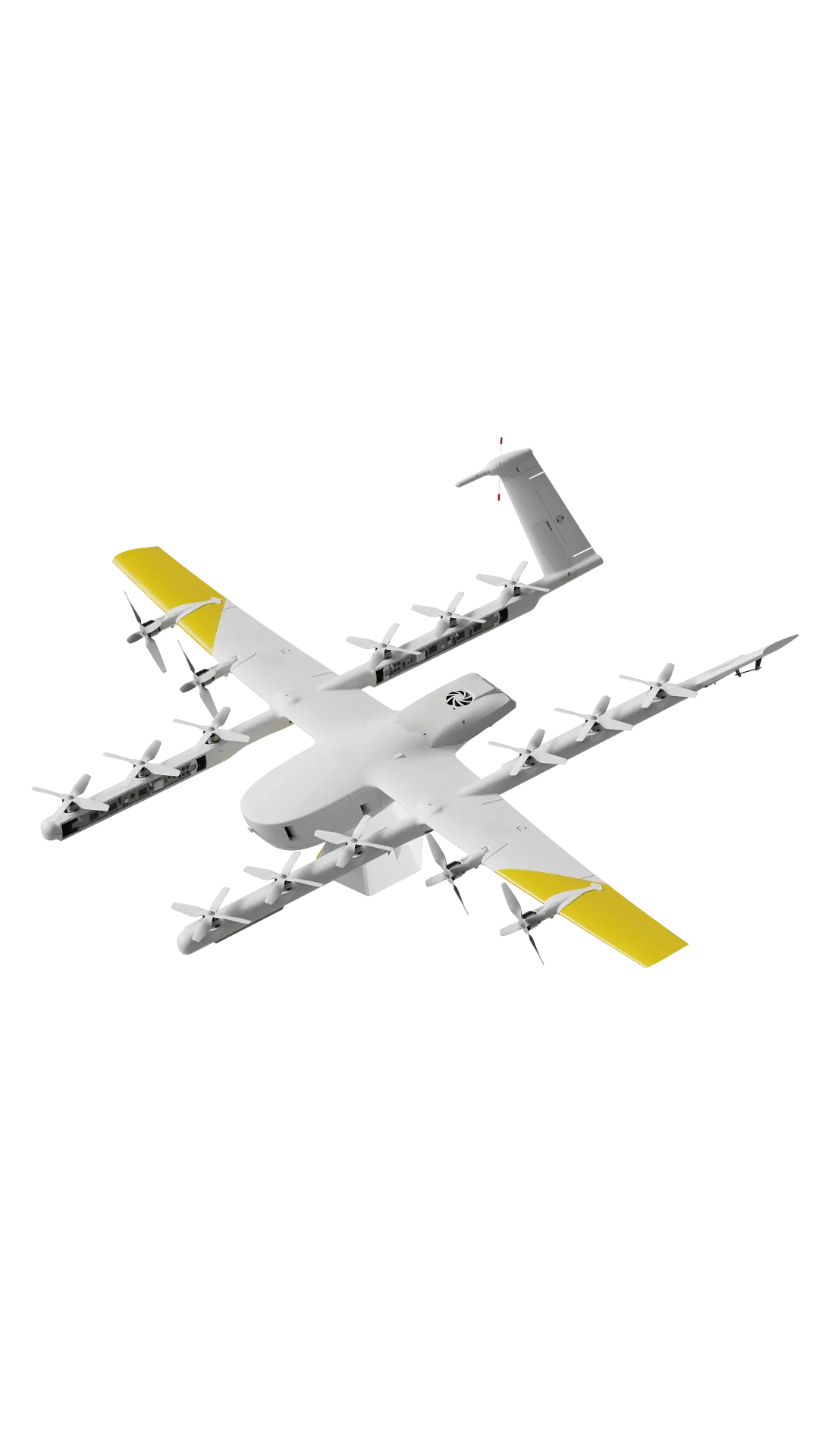
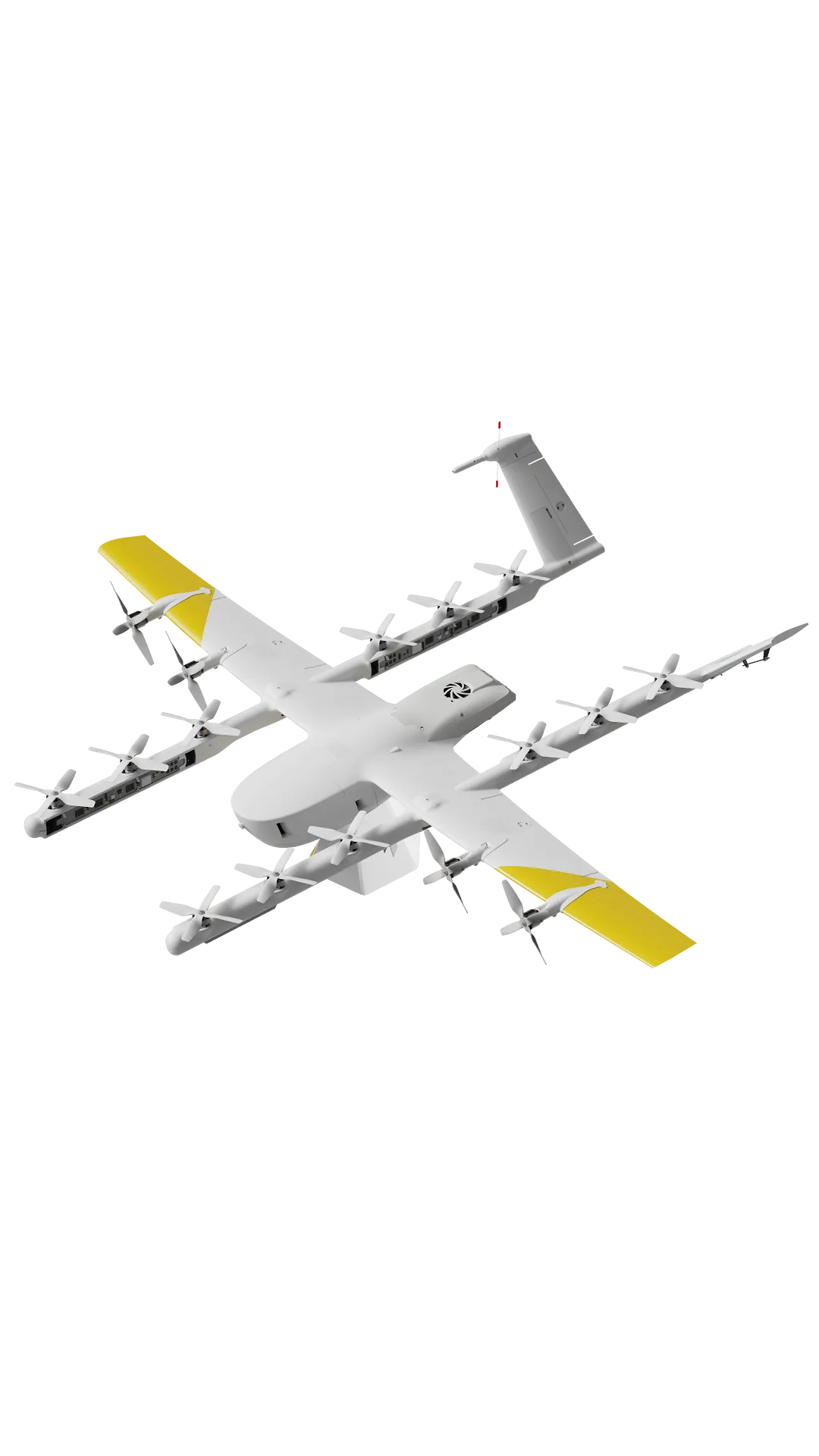
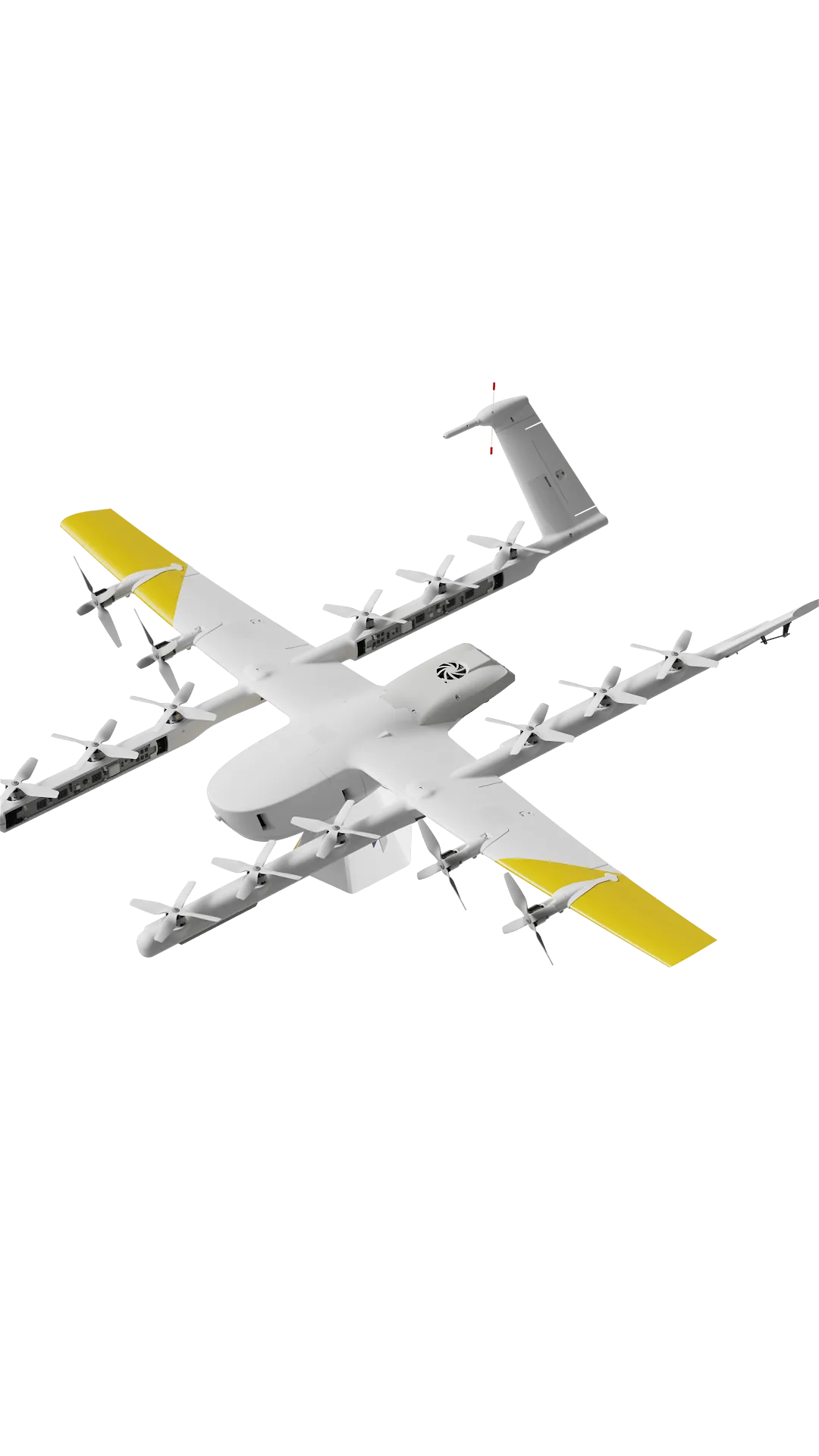
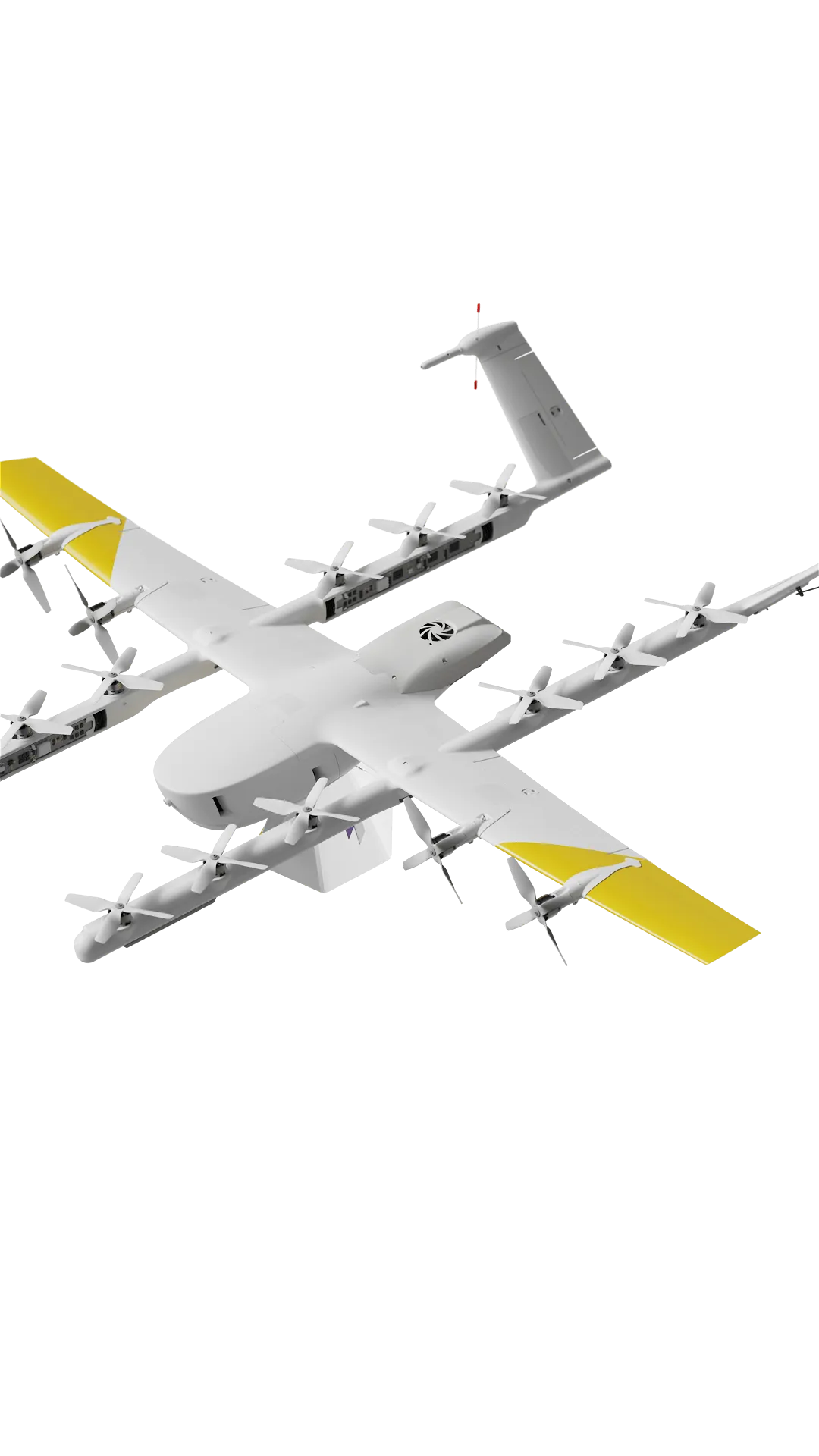
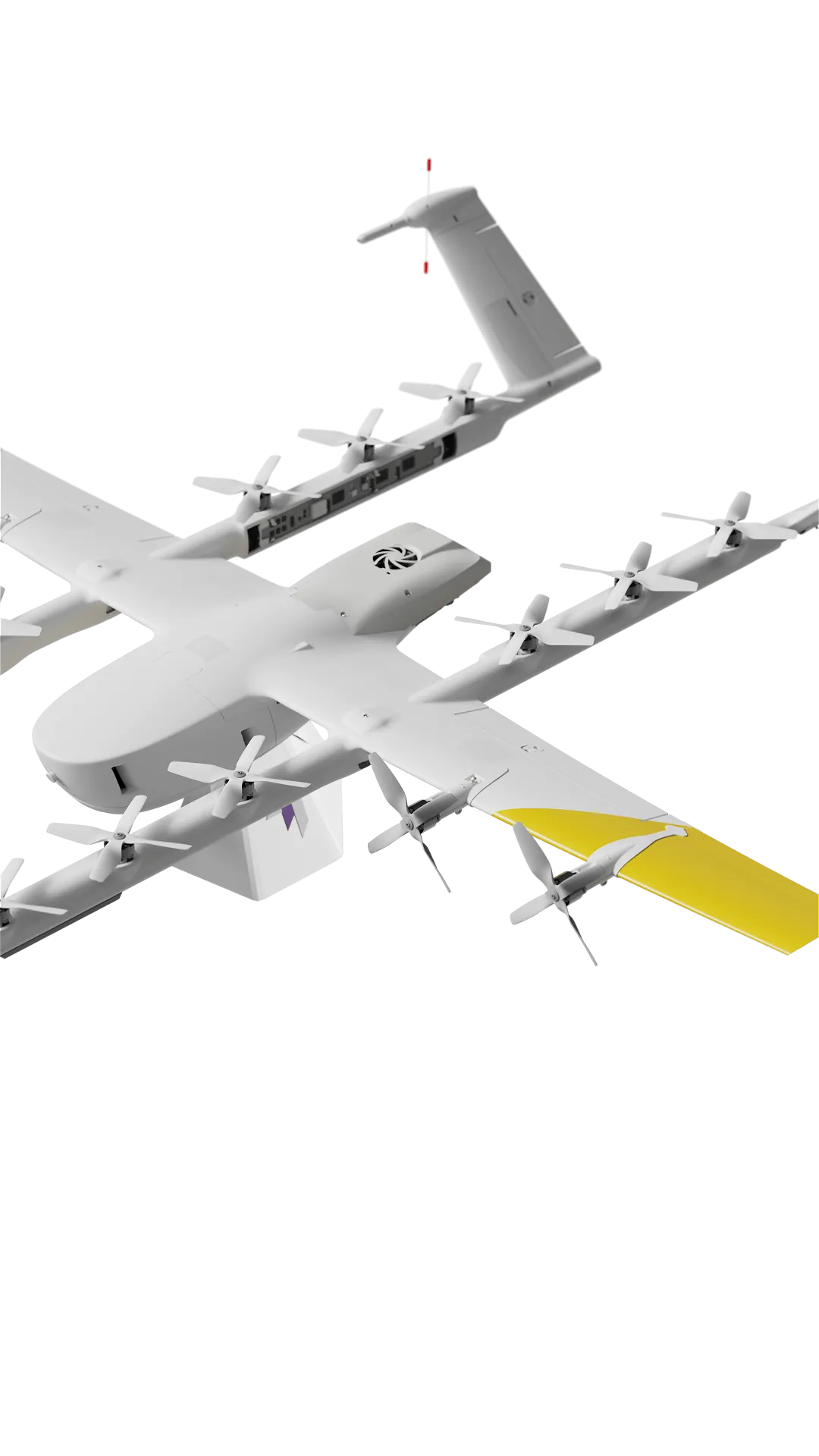
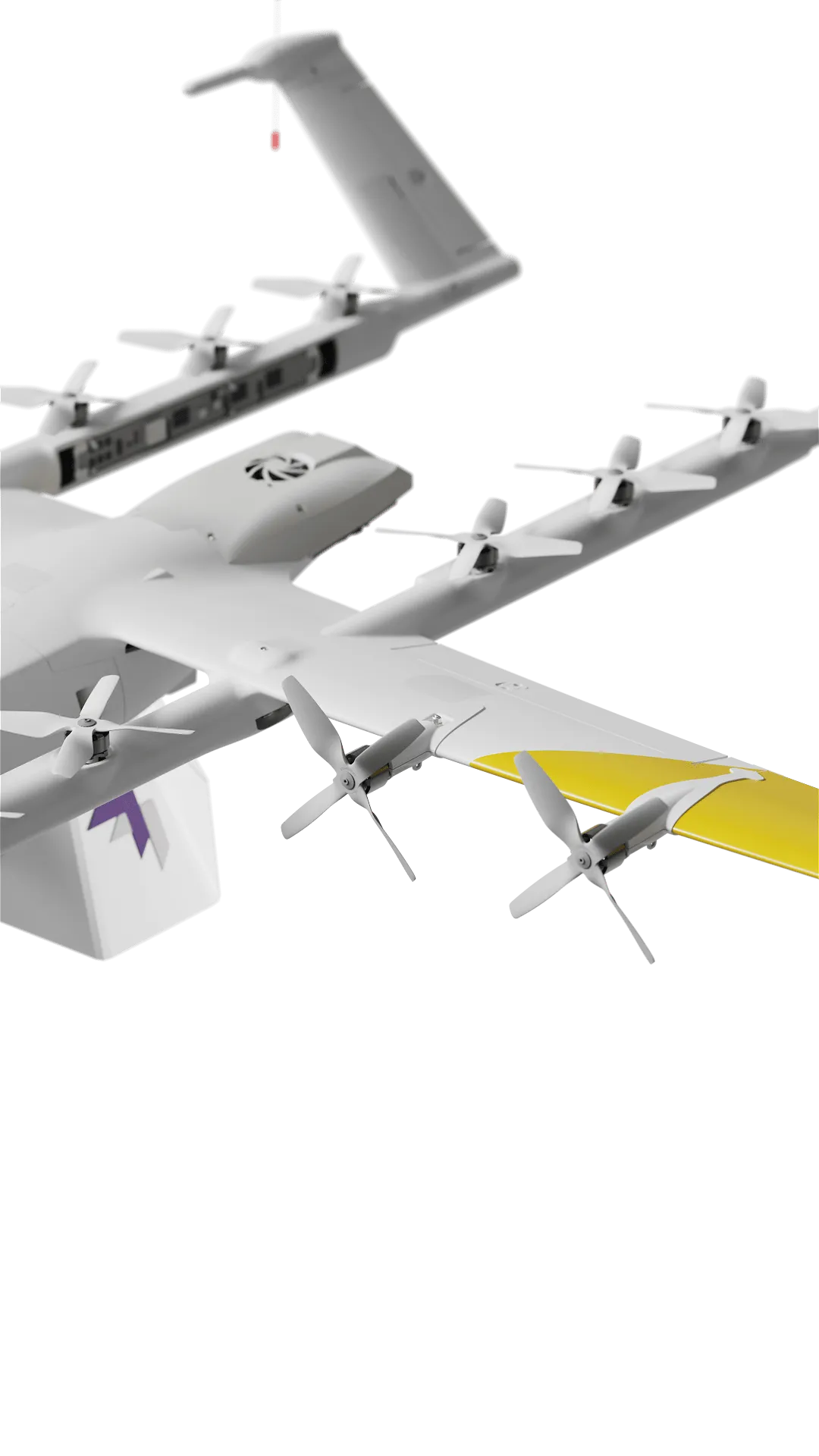
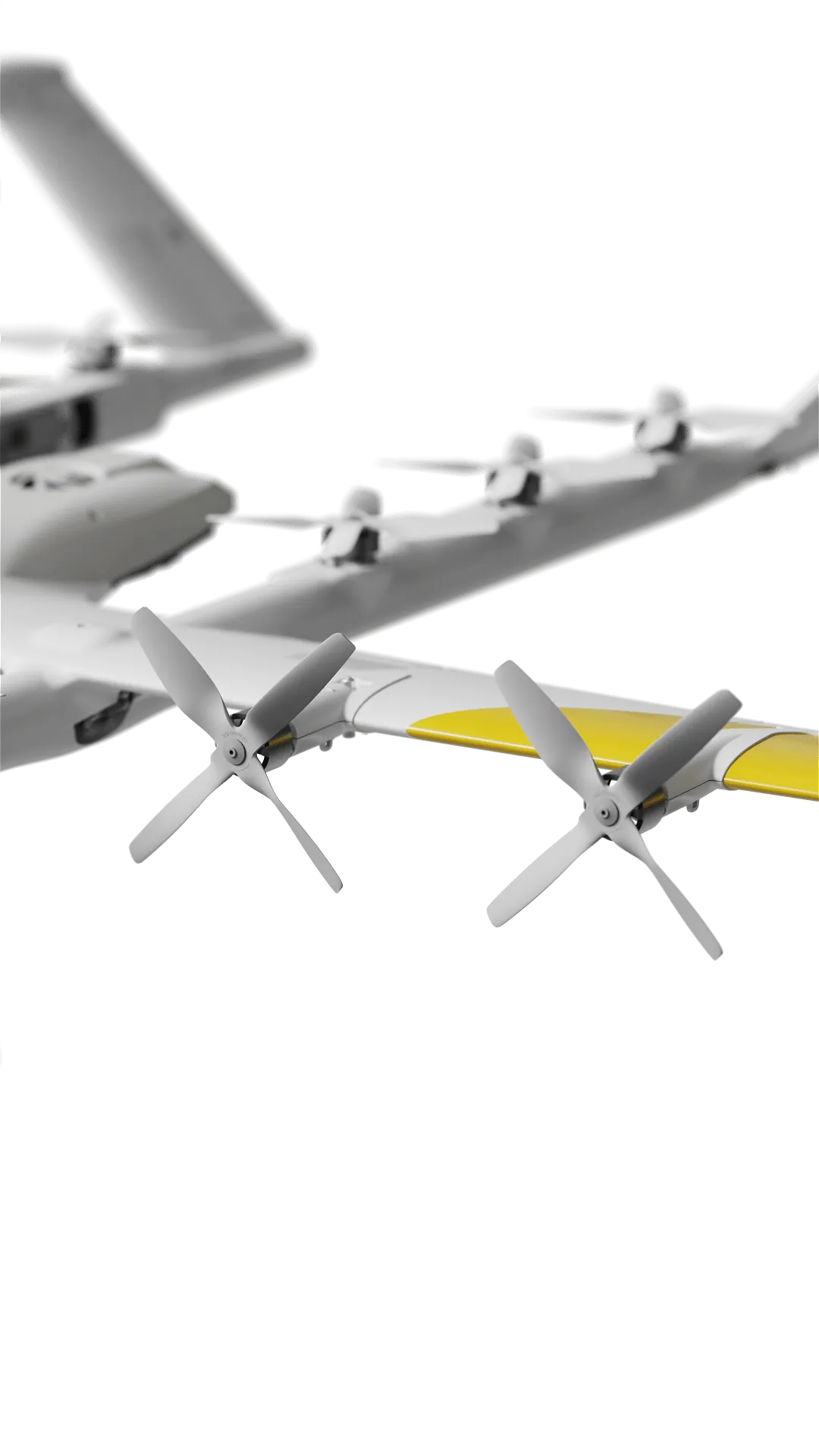
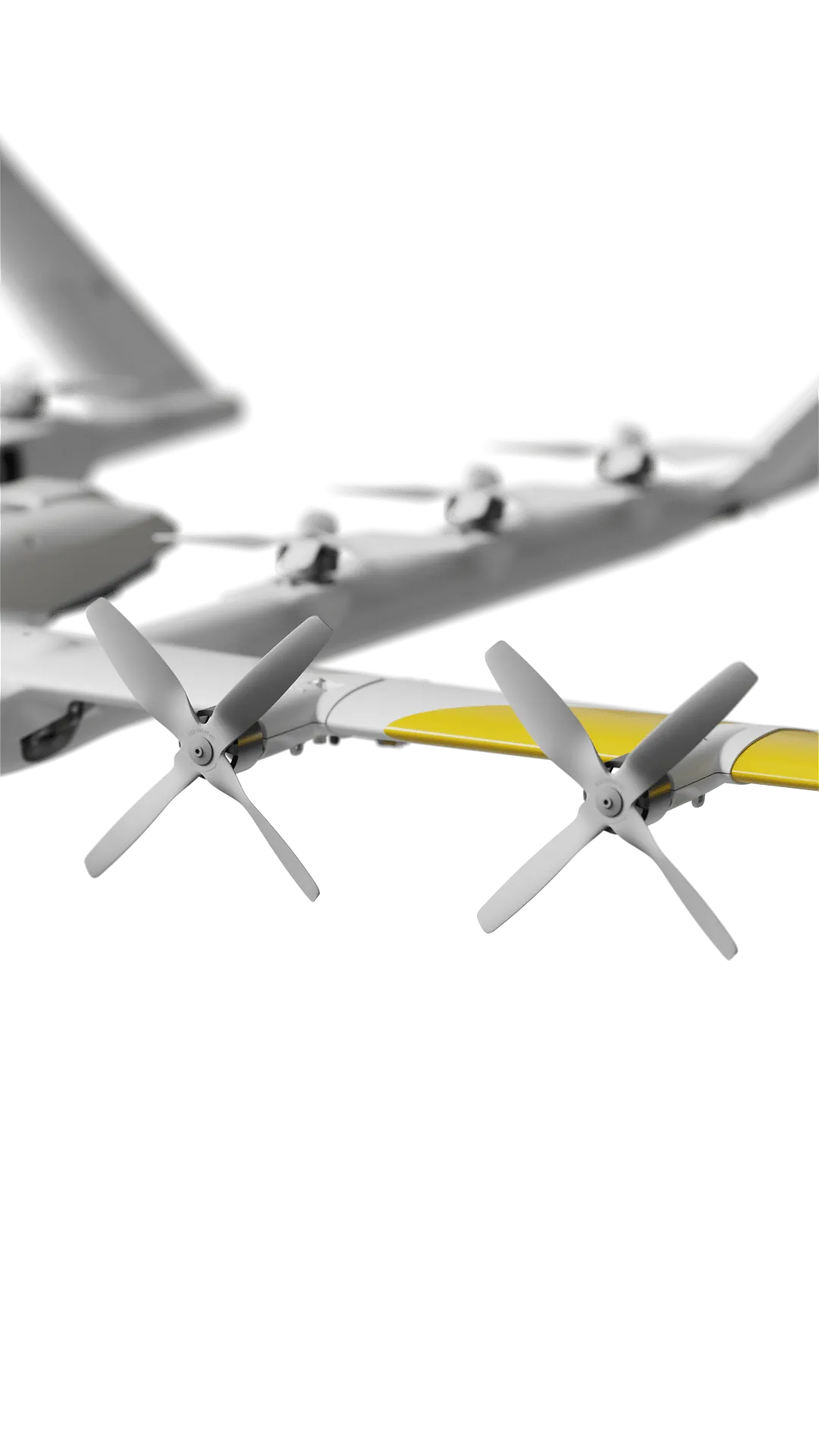
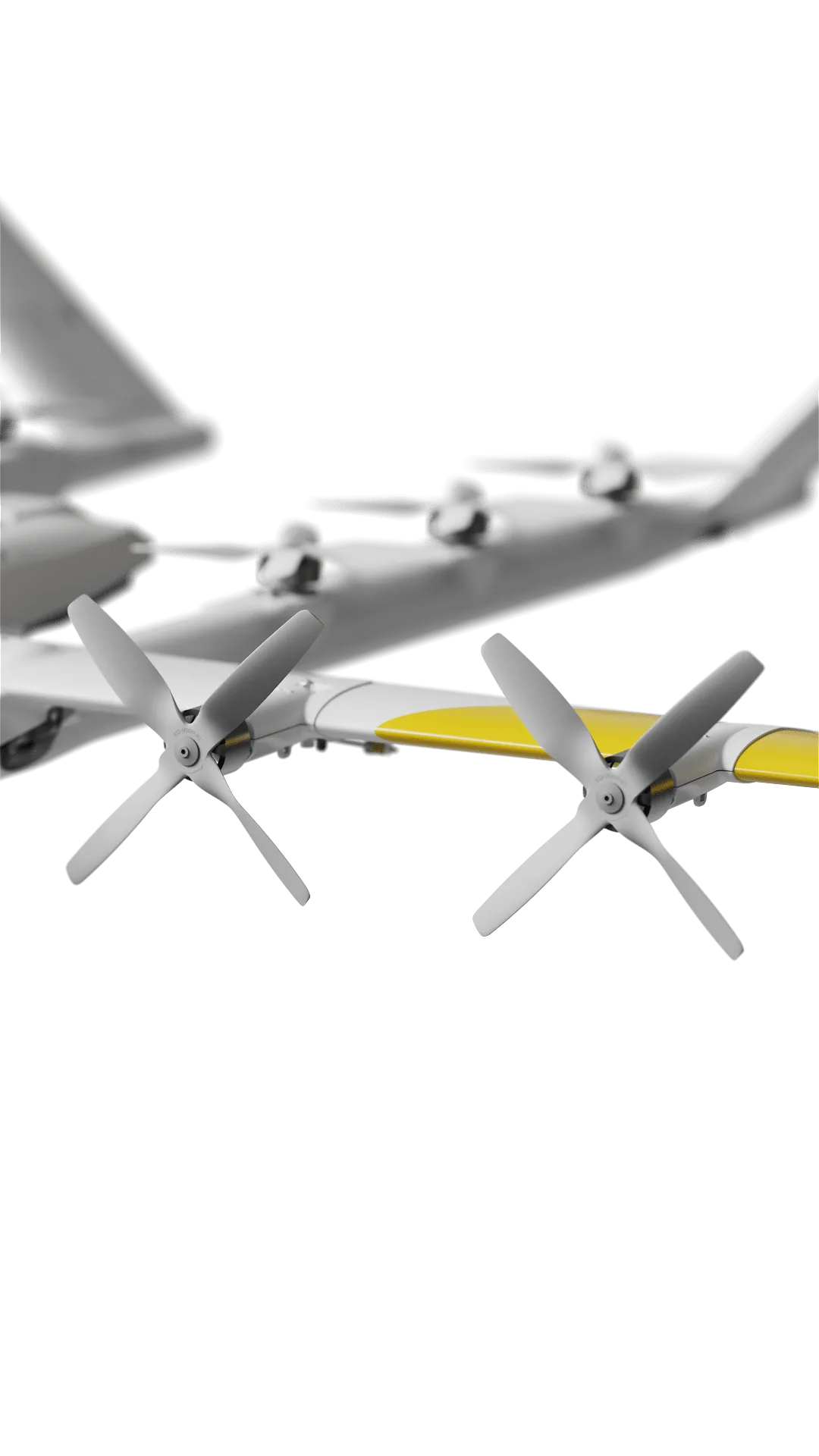
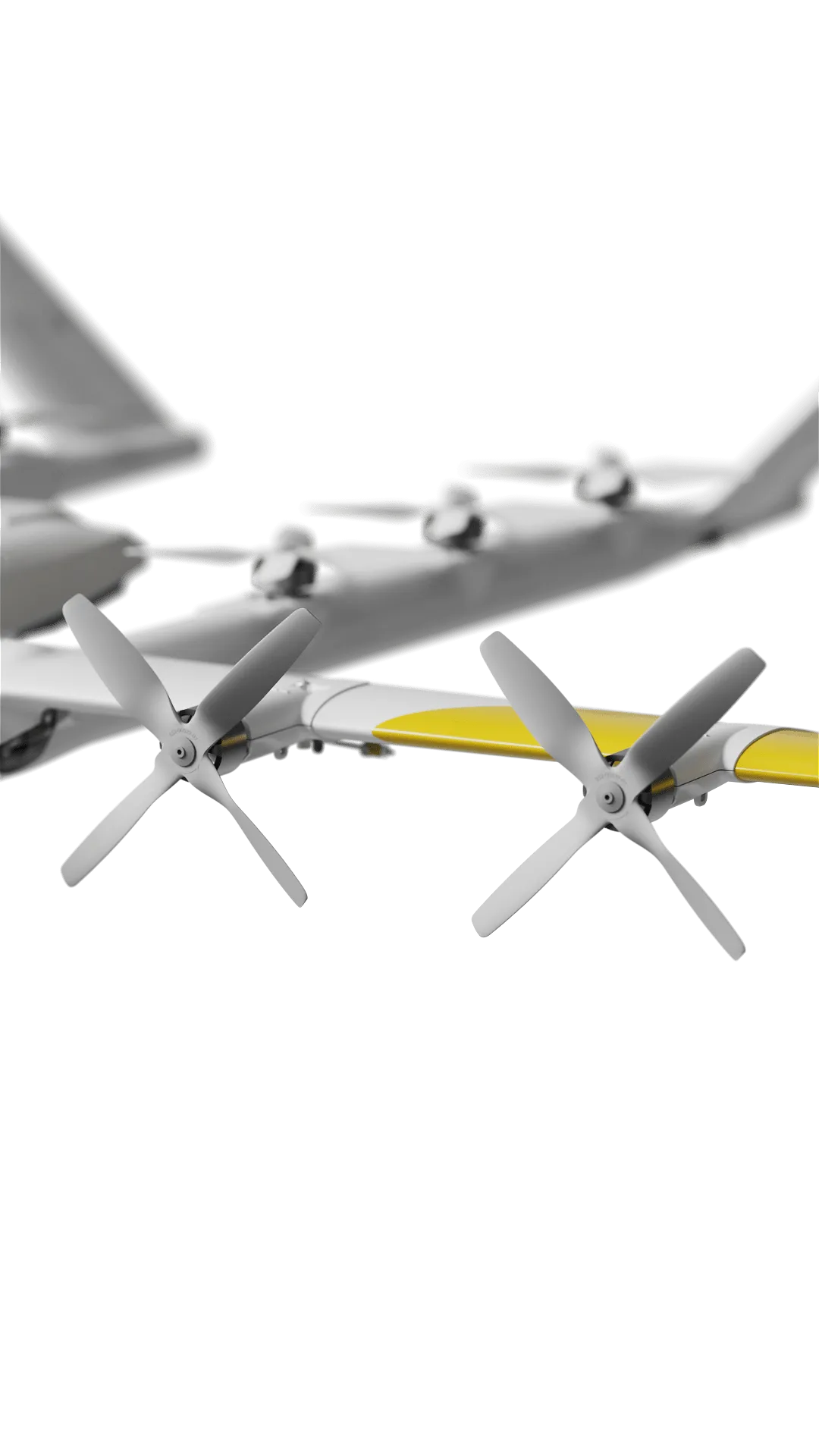
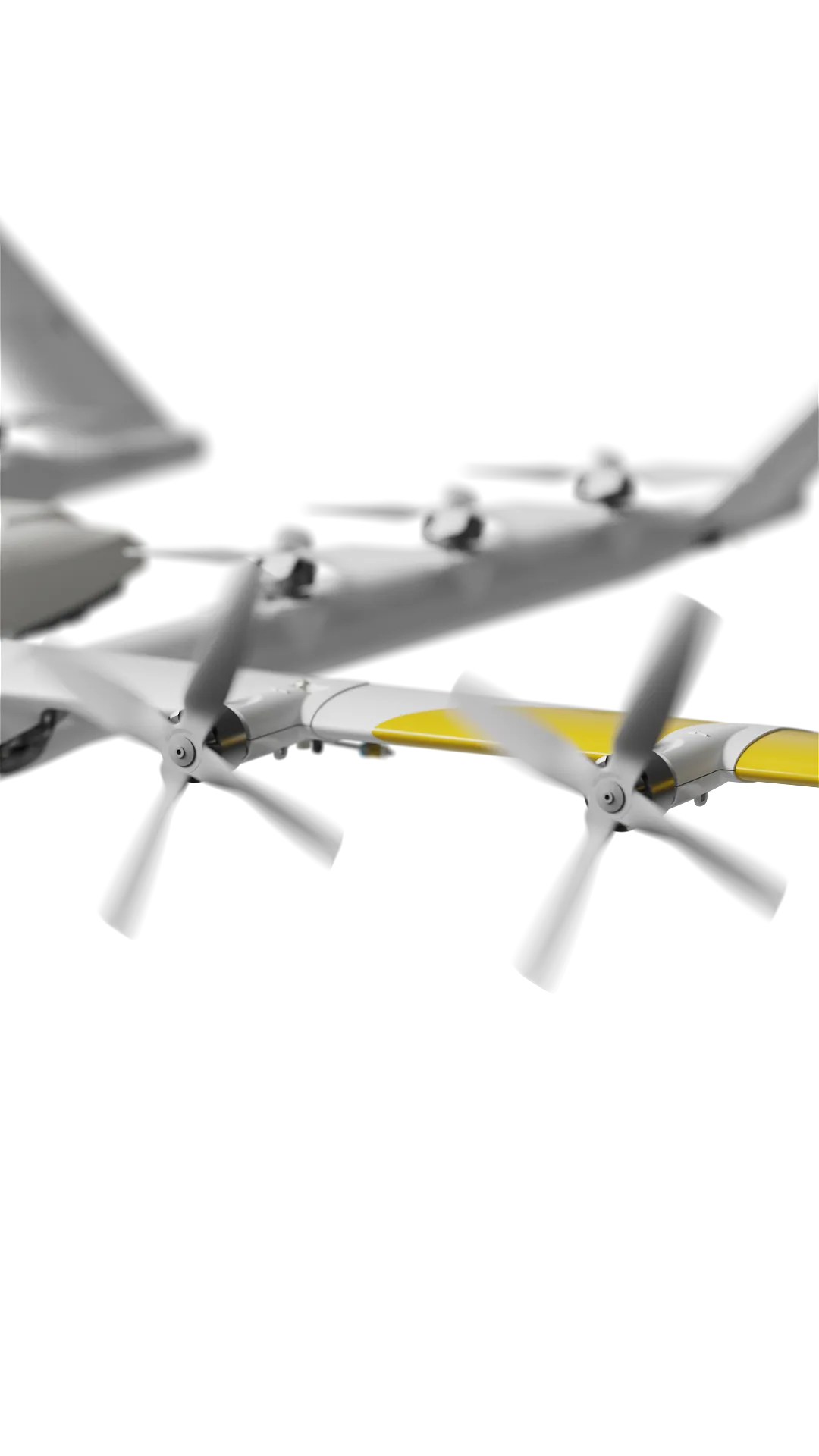
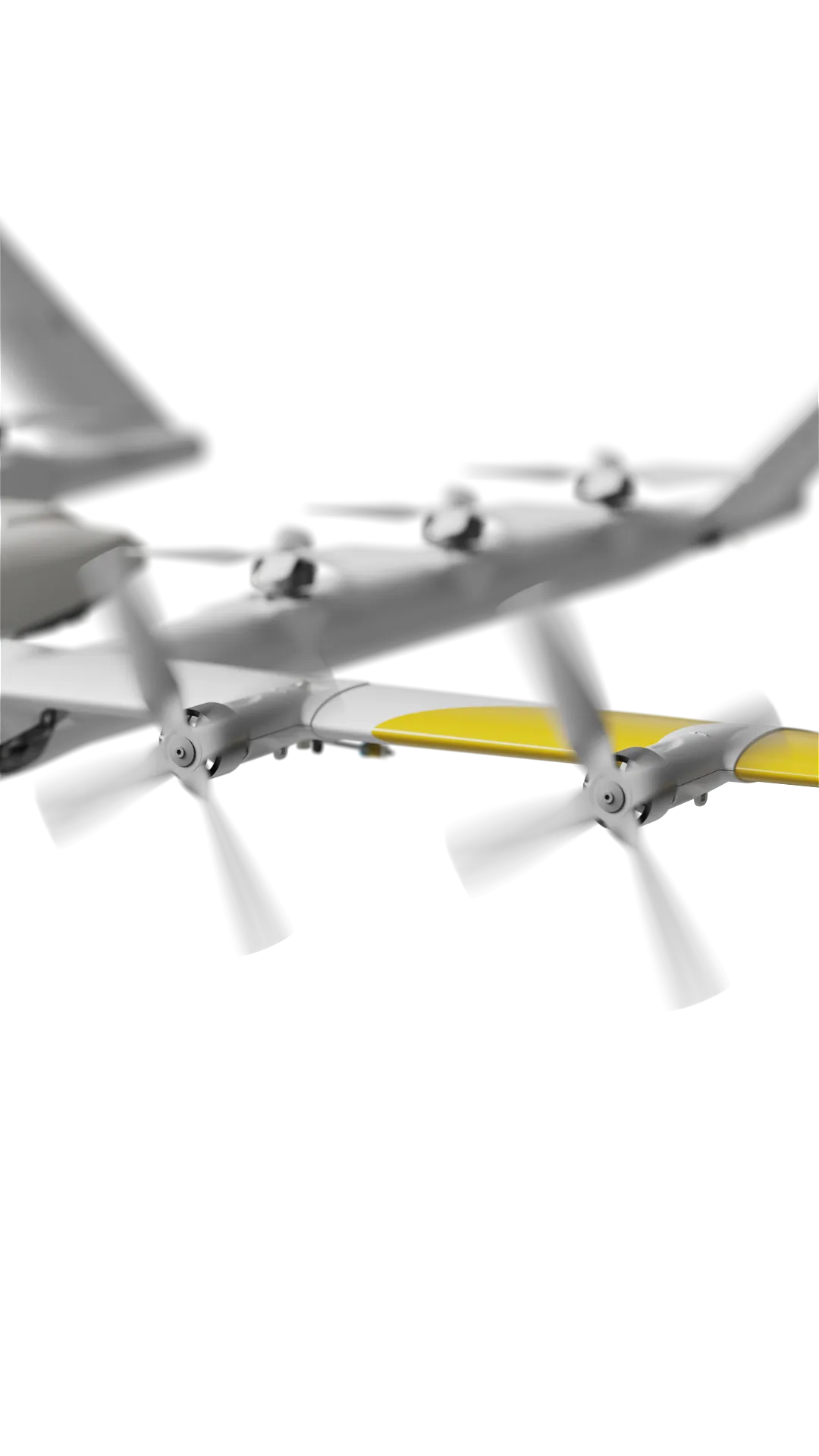
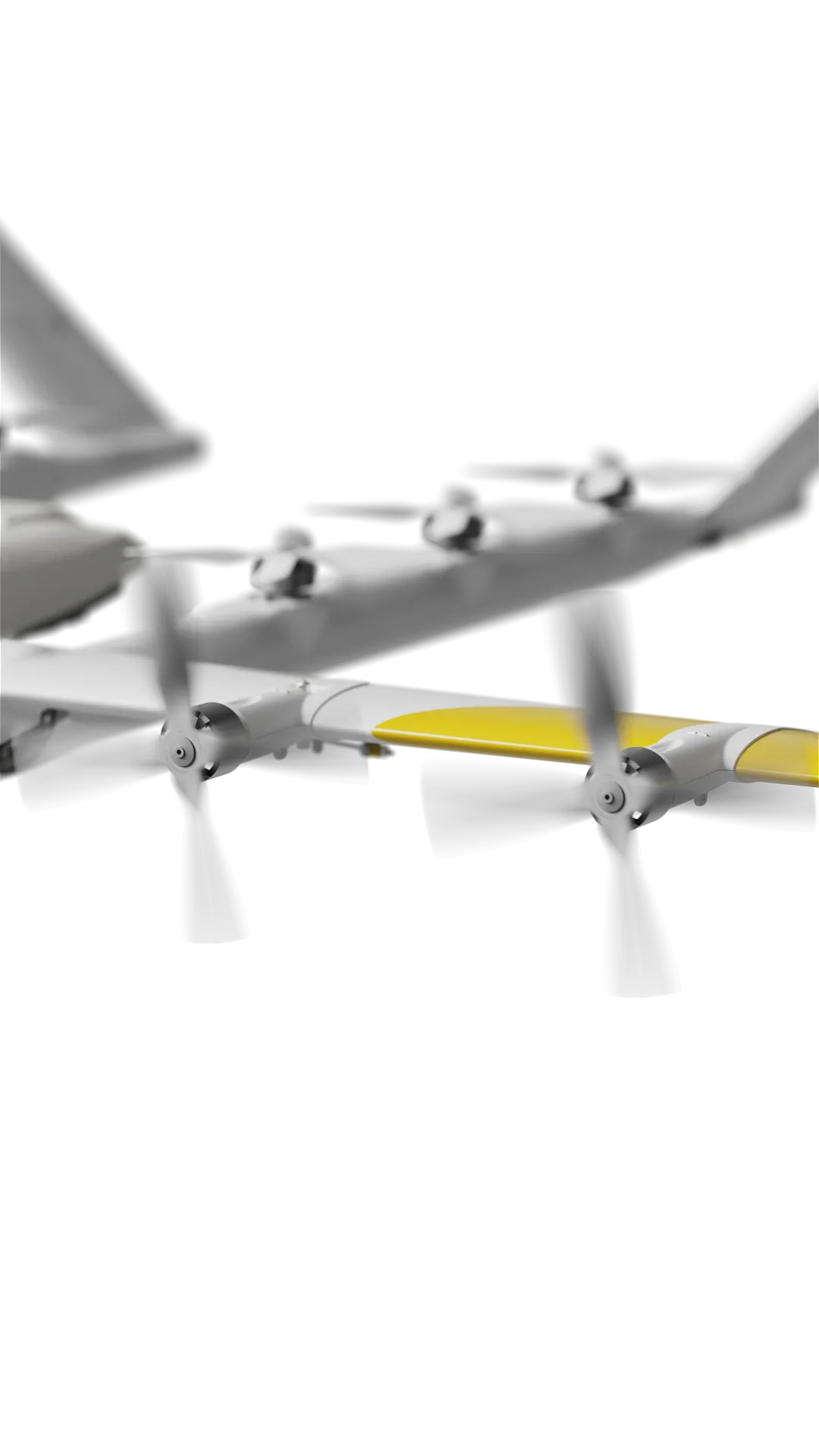
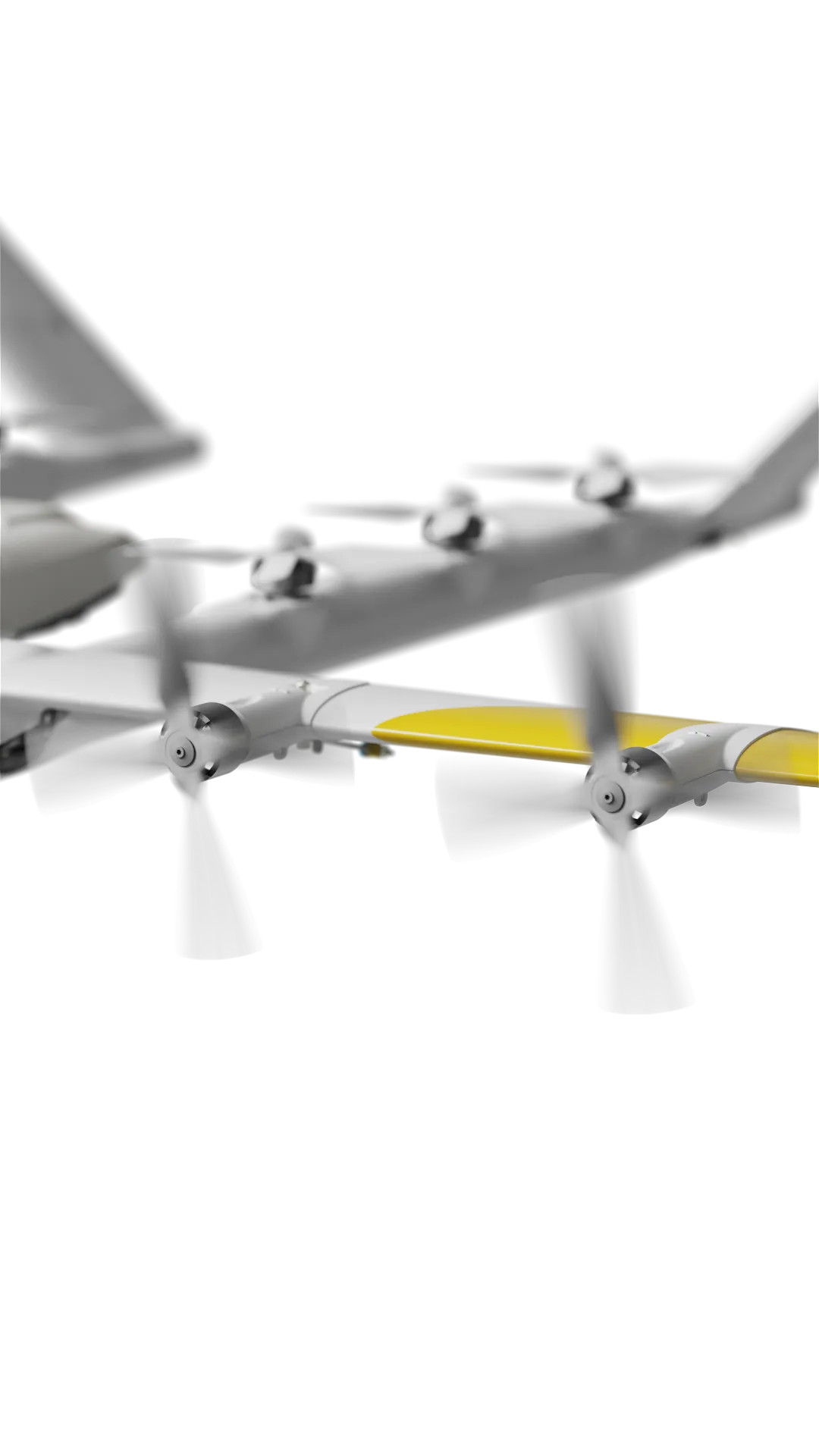
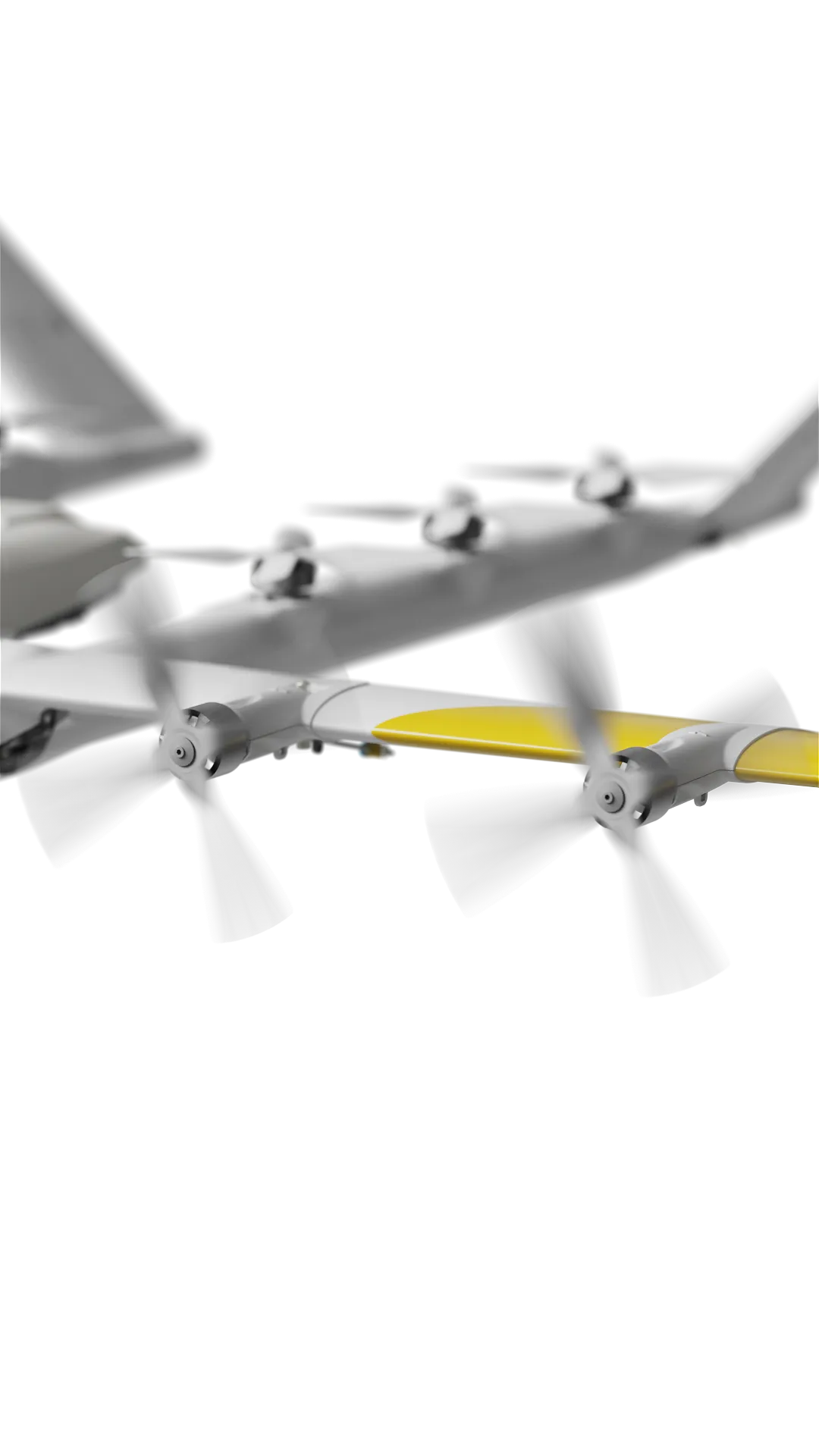
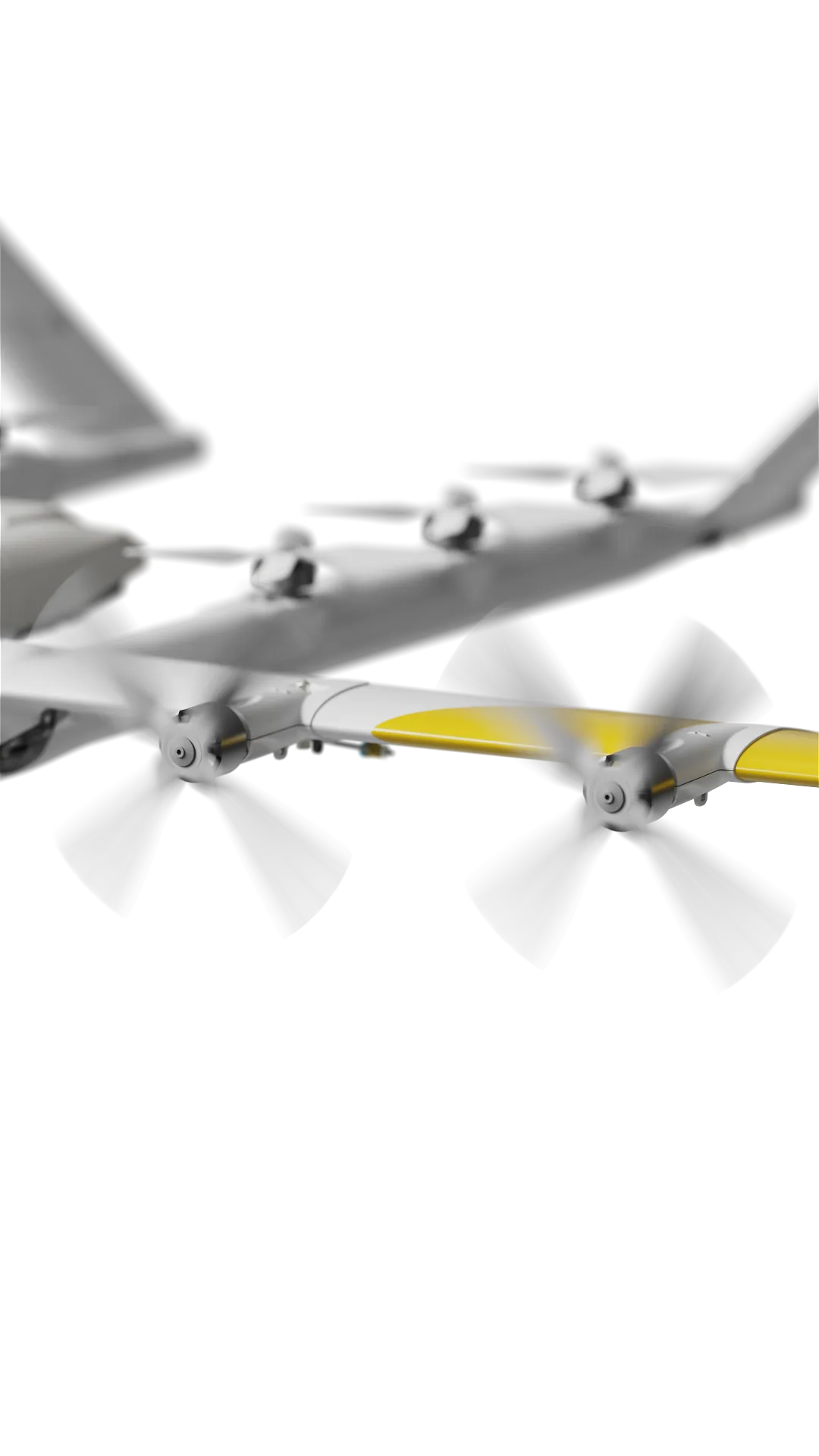
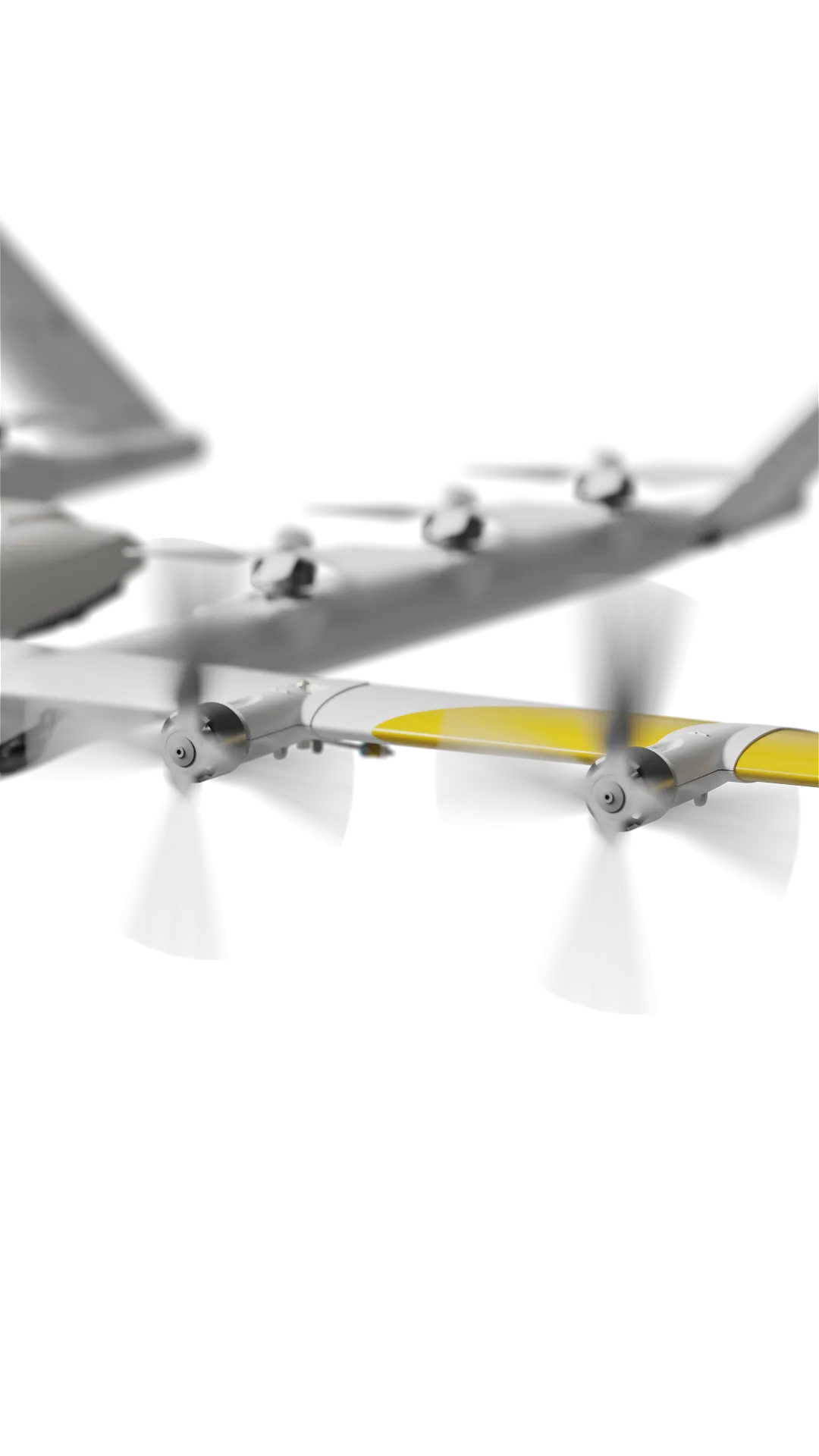
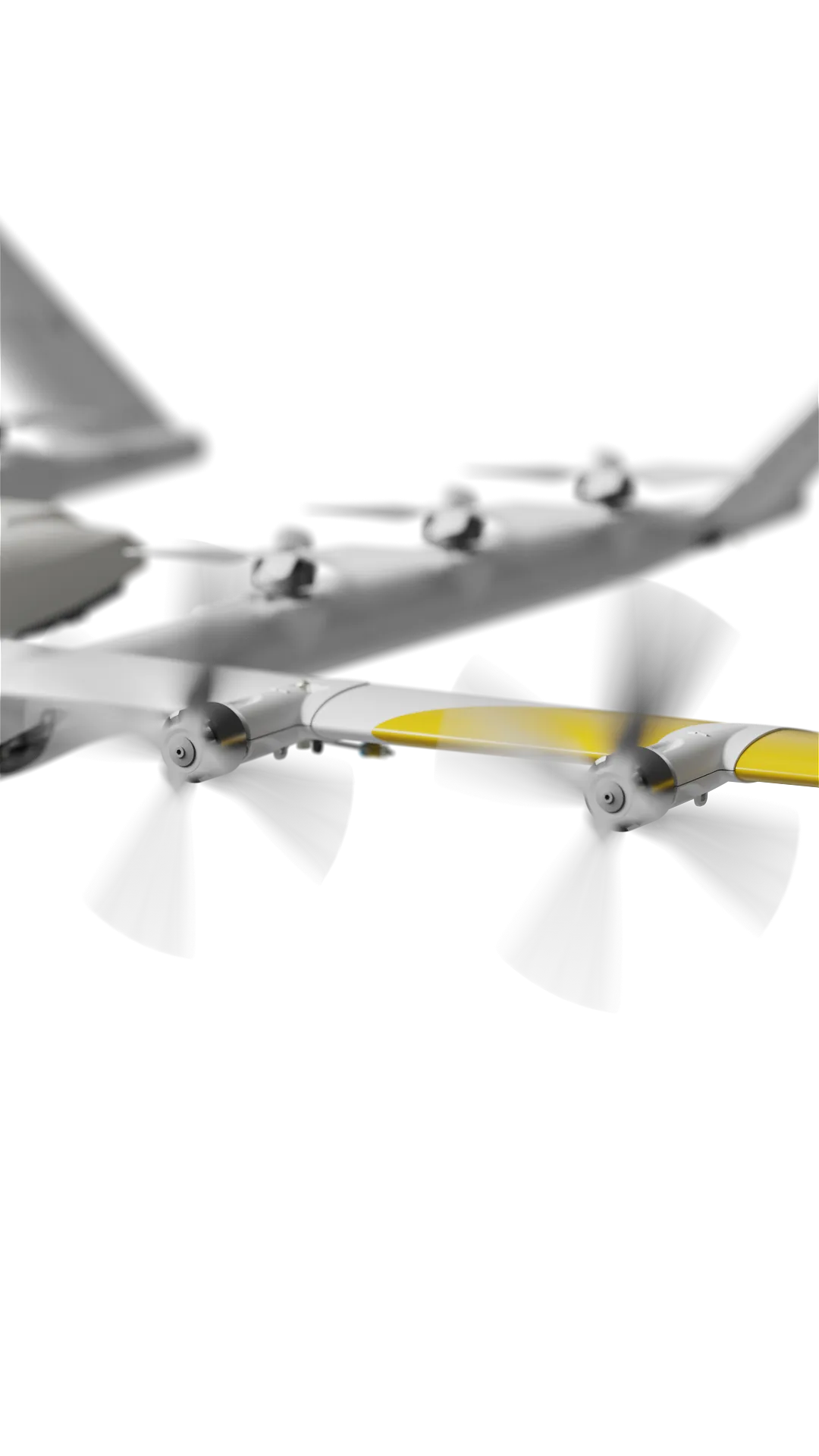
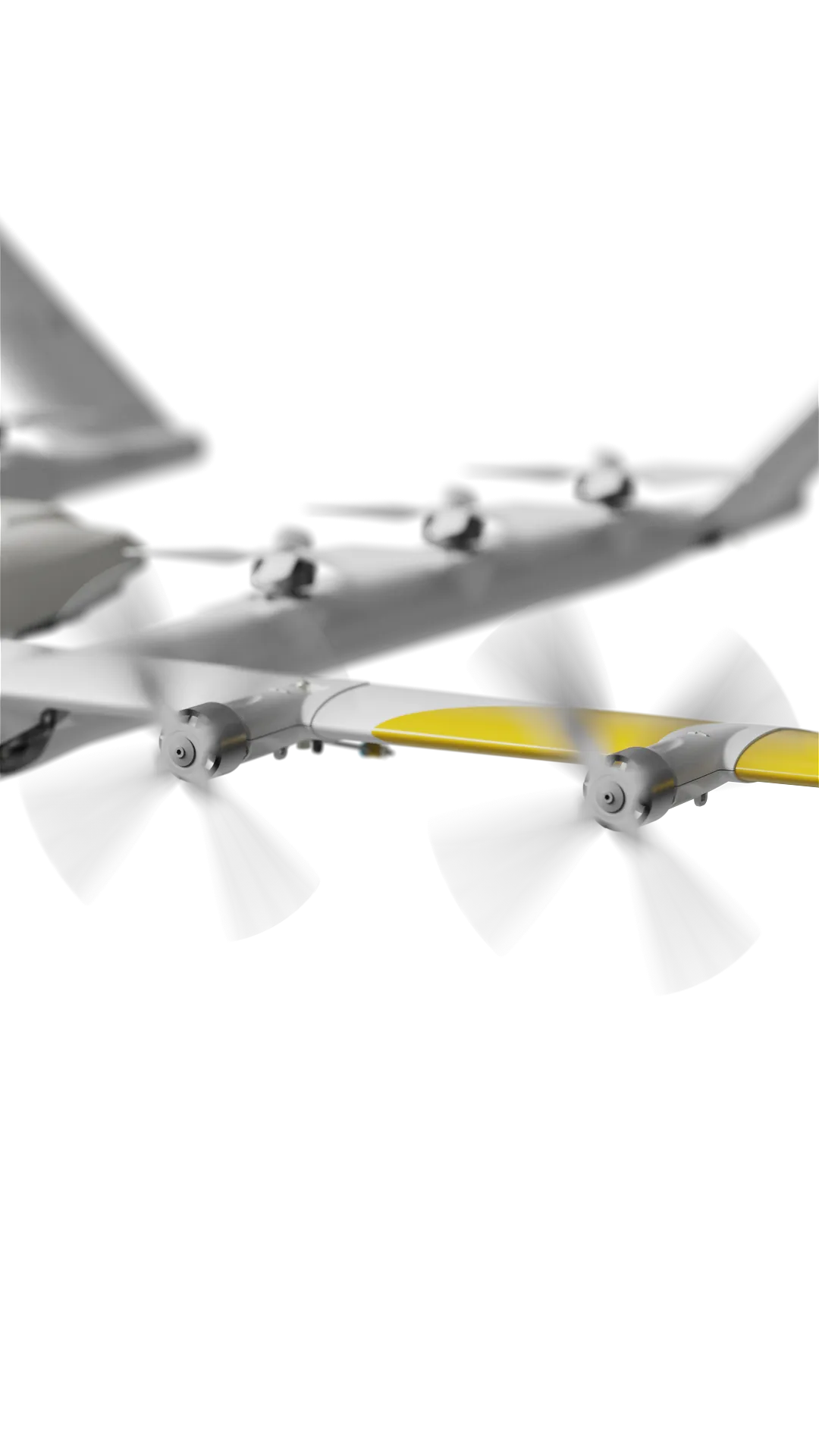
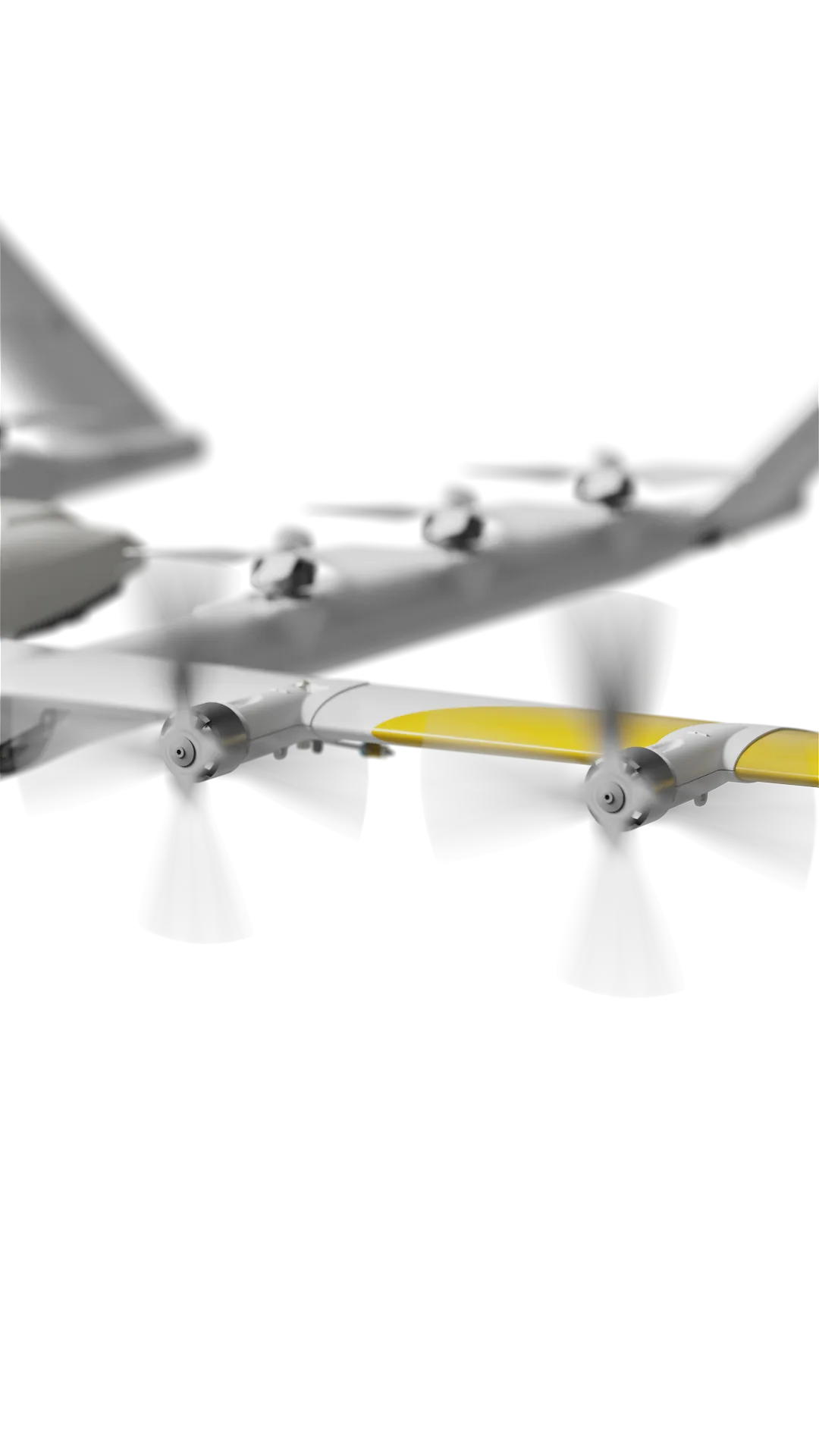
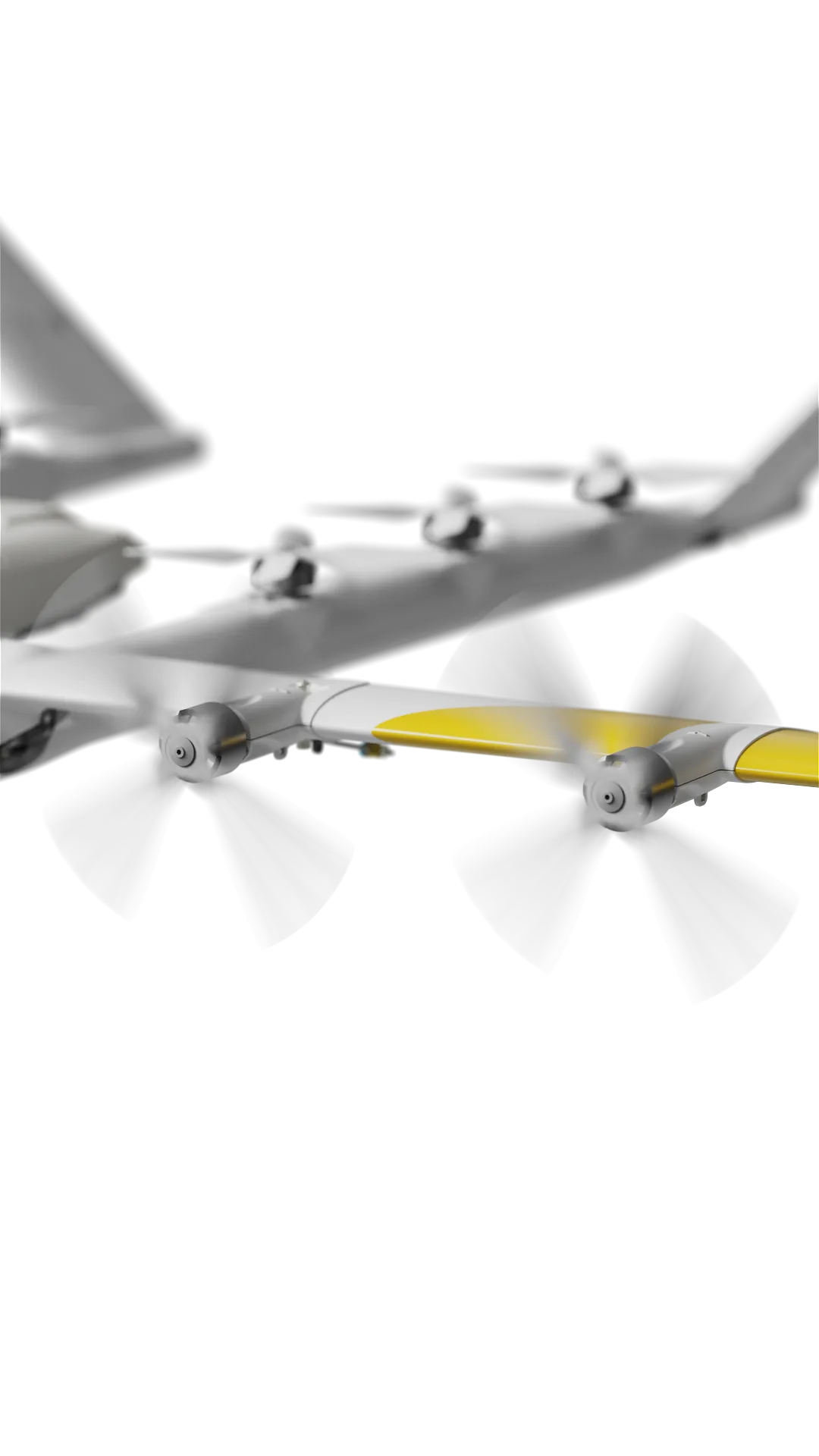
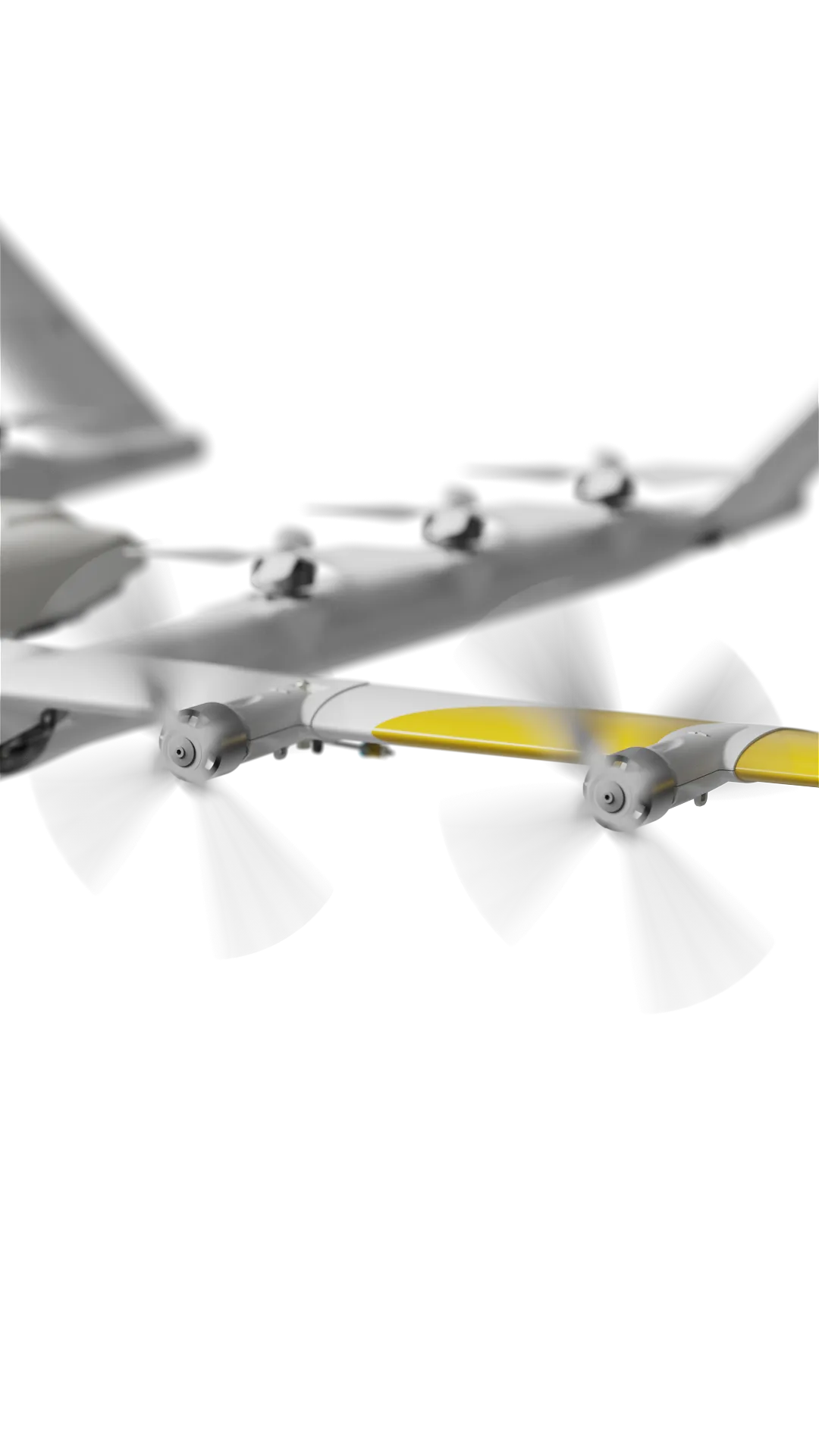
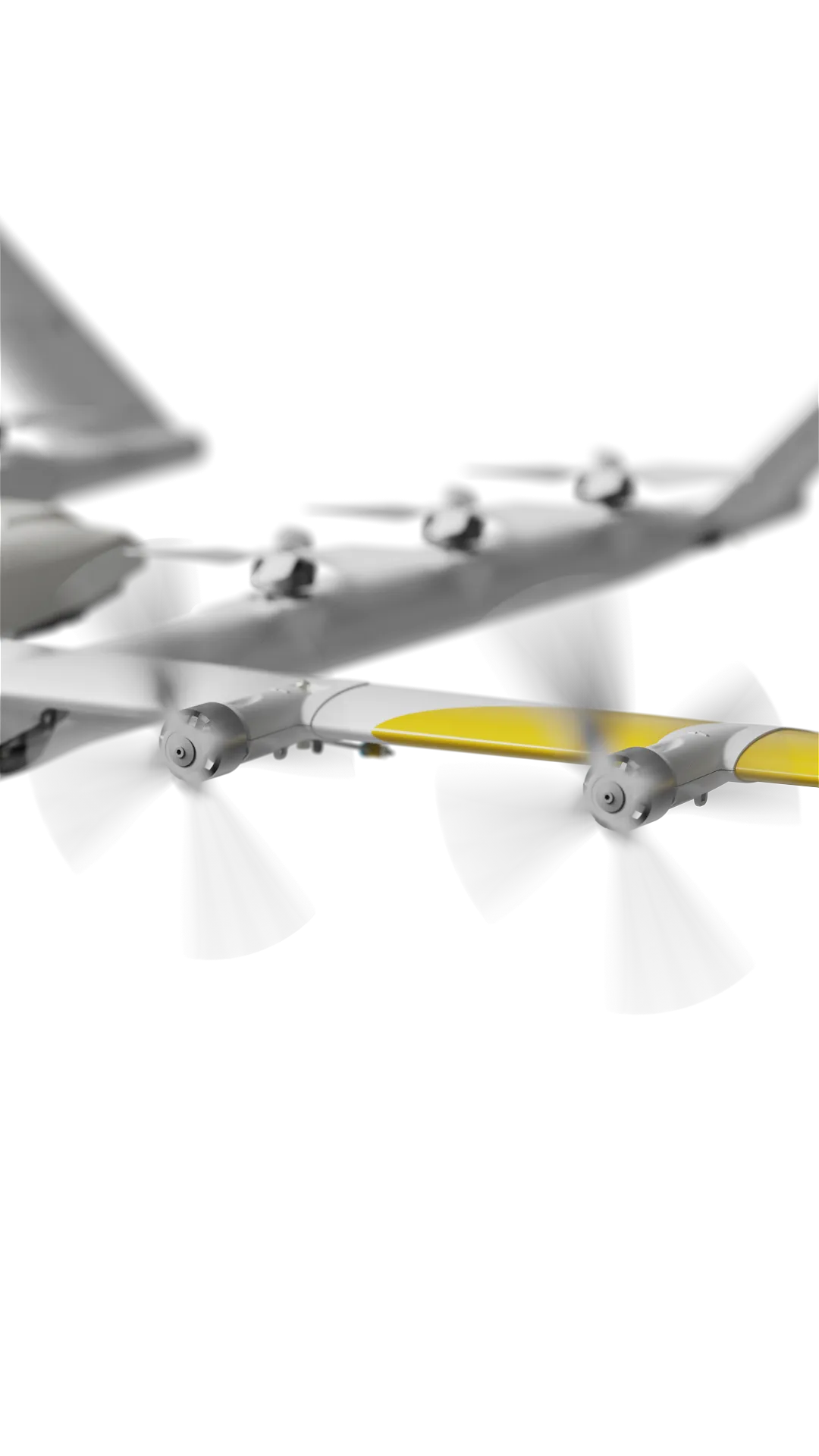
Our drones
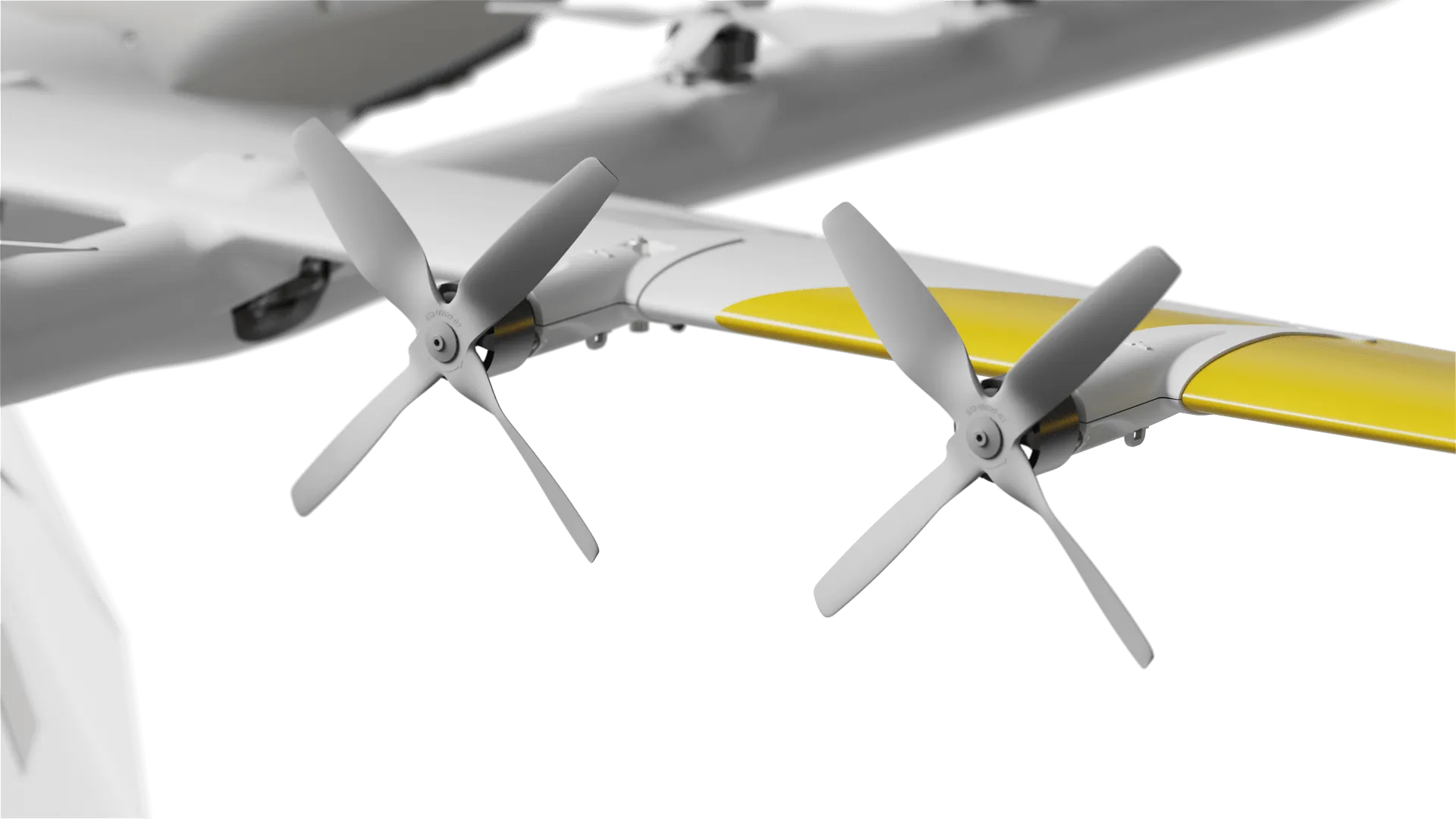
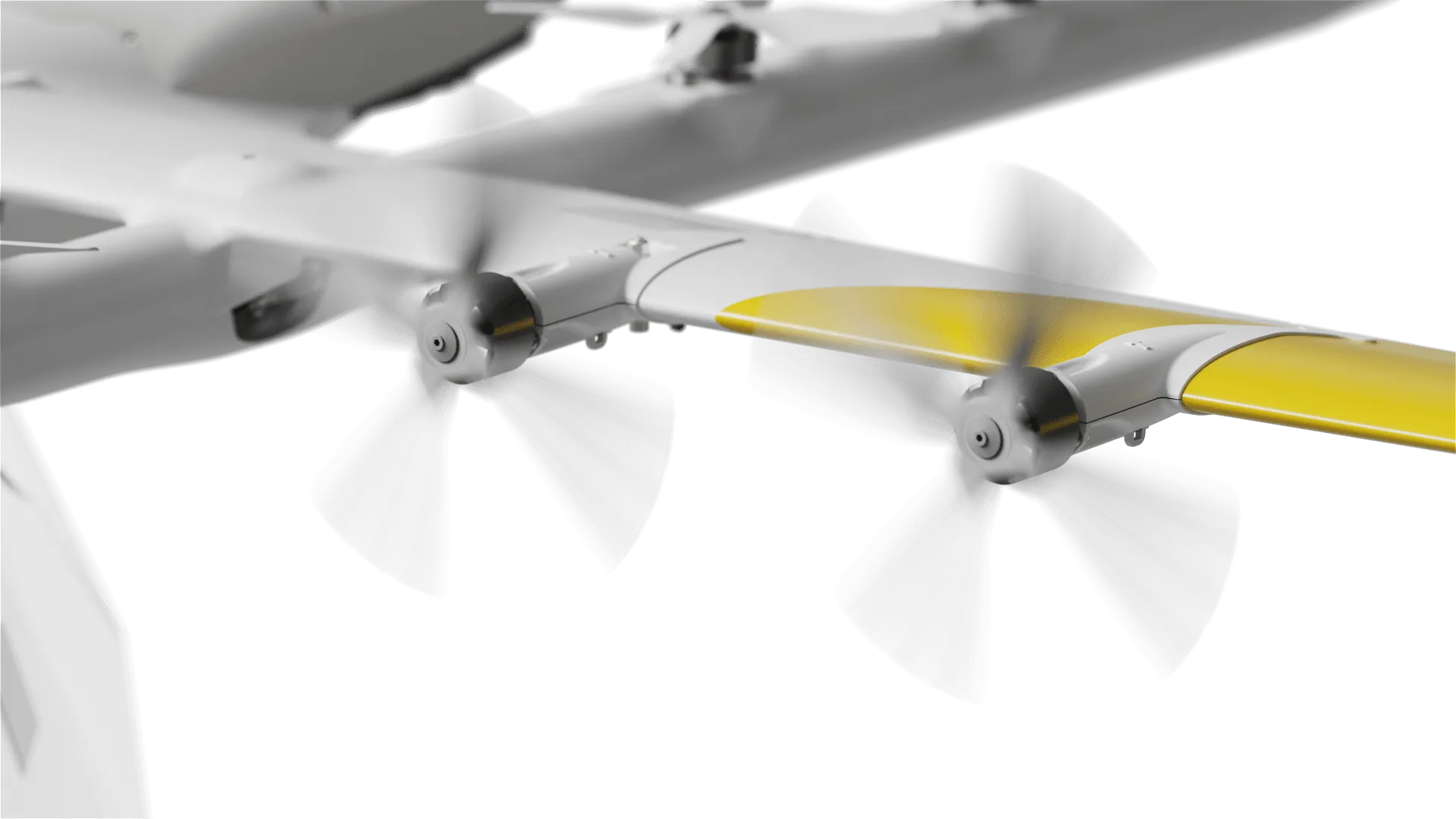
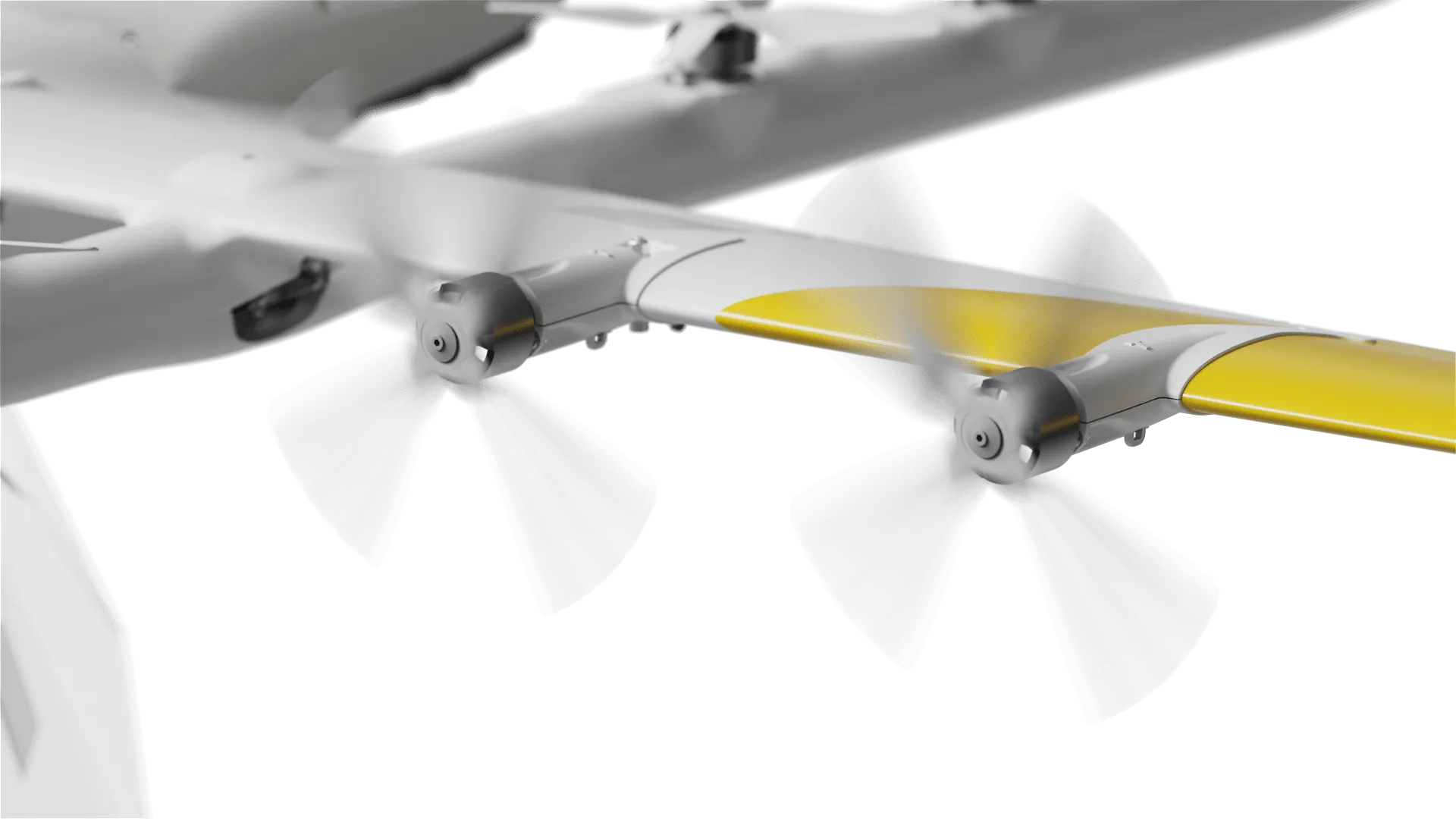
Wing's innovative design uses a unique dual-propulsion system. Vertical lift motors enable precision takeoff, delivery, and landing. Separate cruise motors optimize efficiency for long-range delivery.
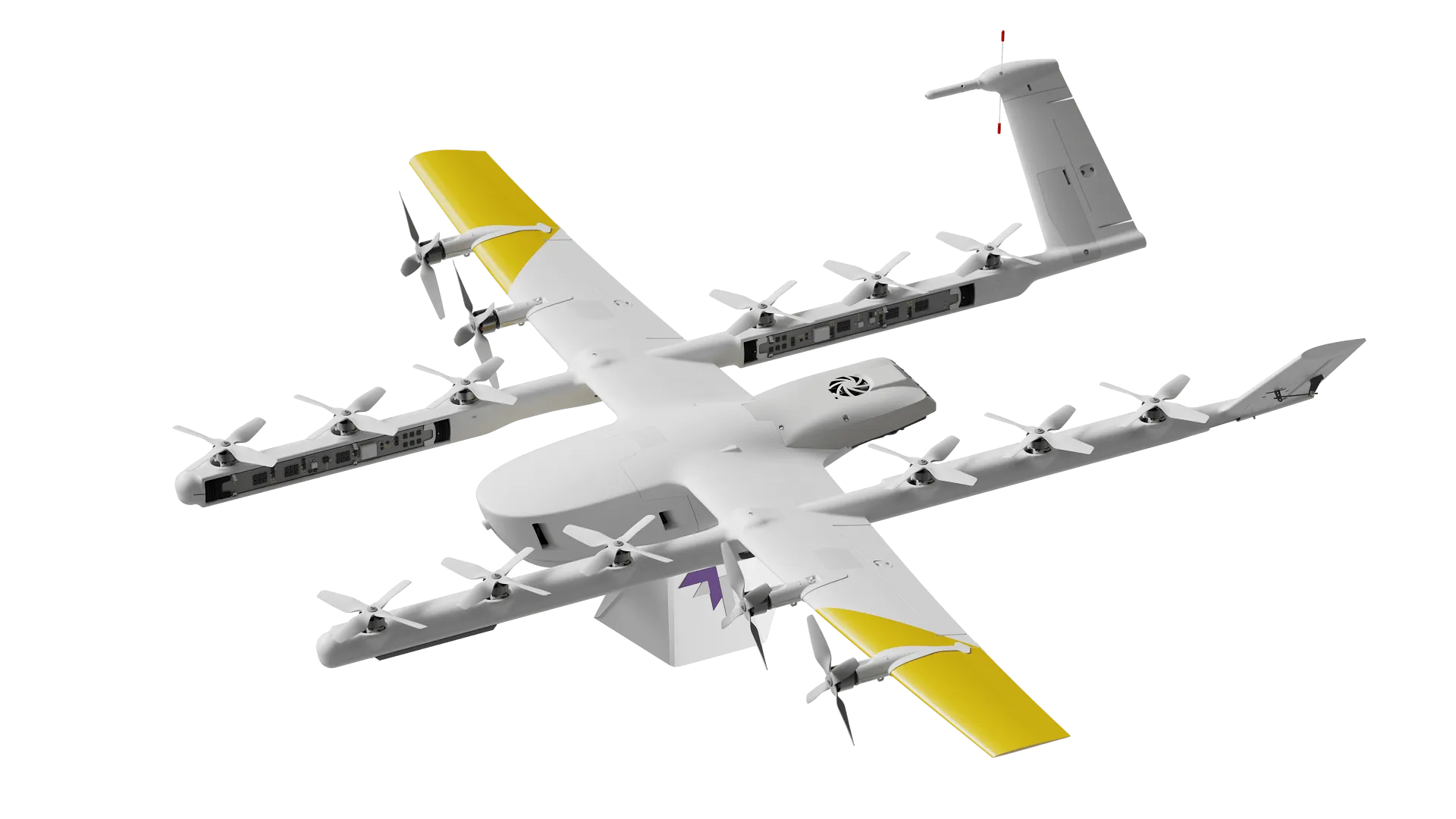
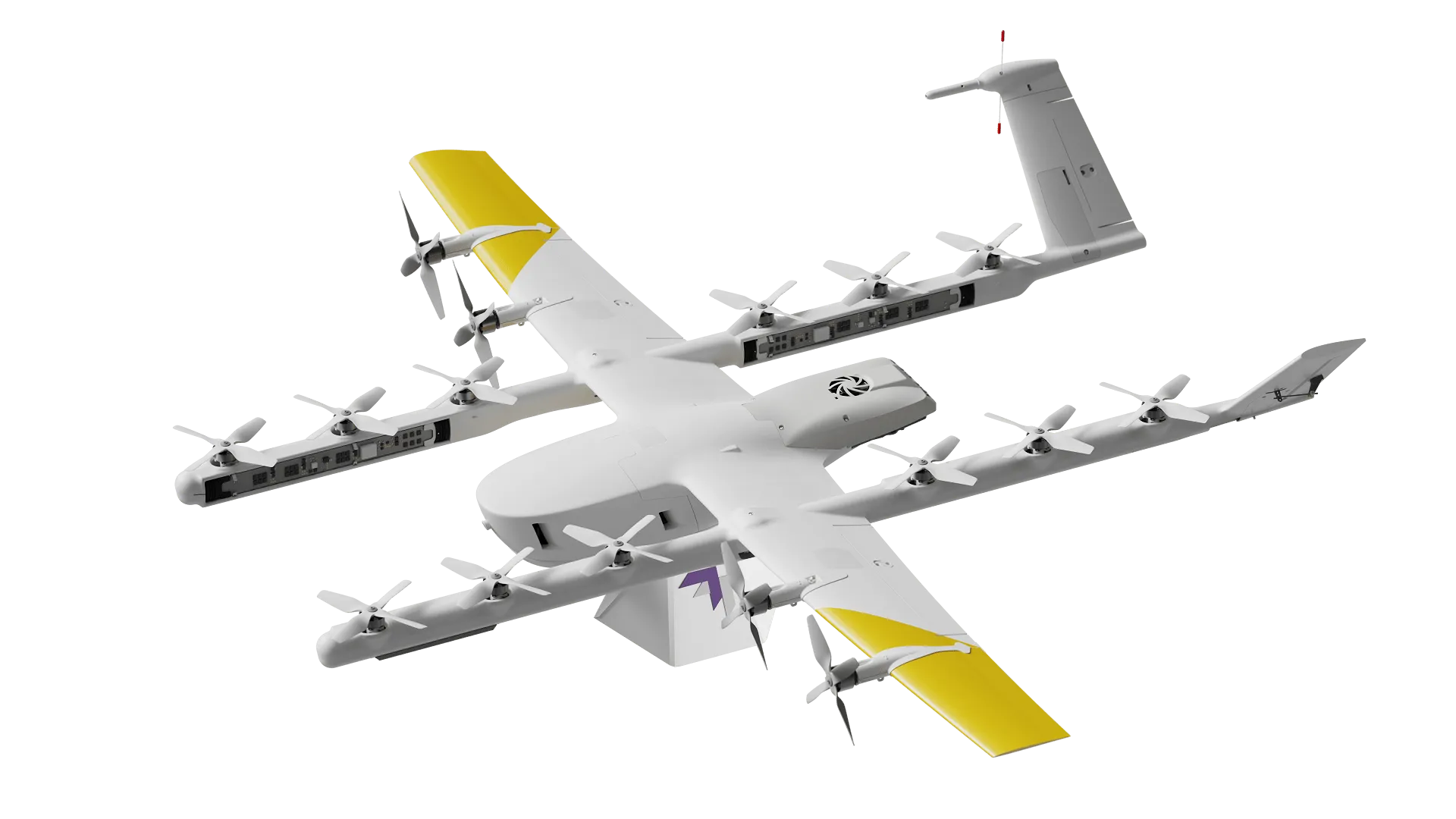
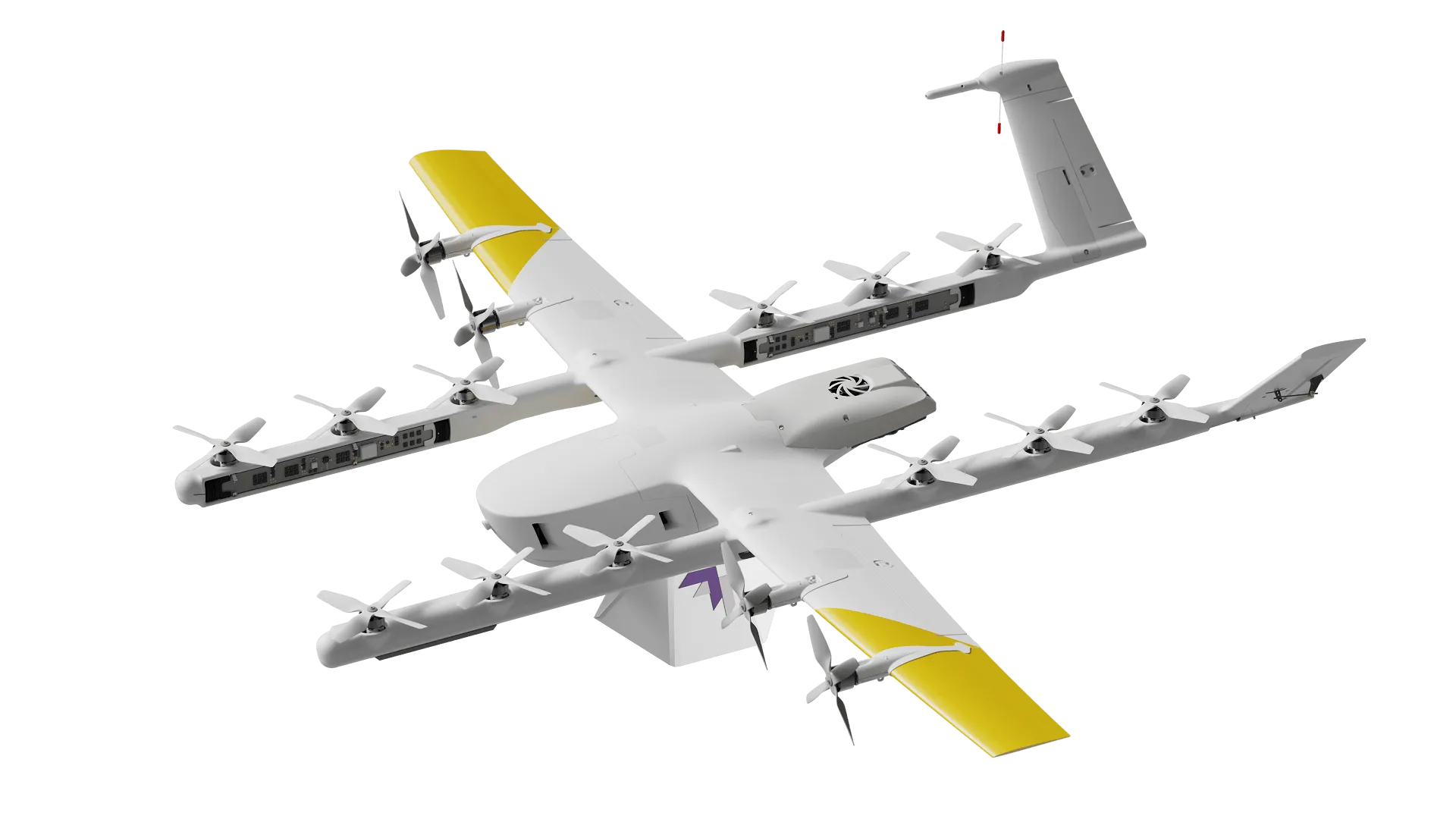
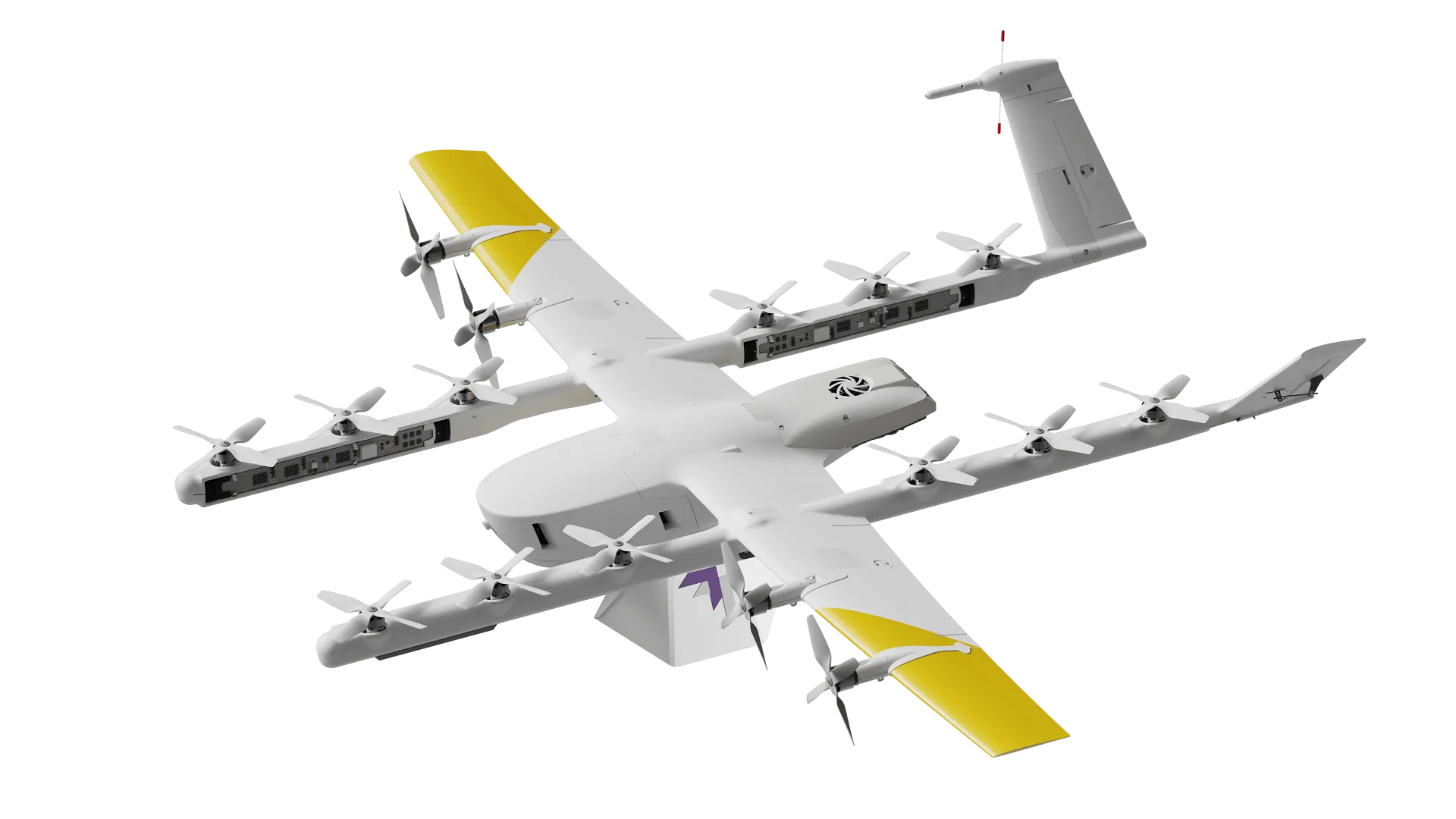
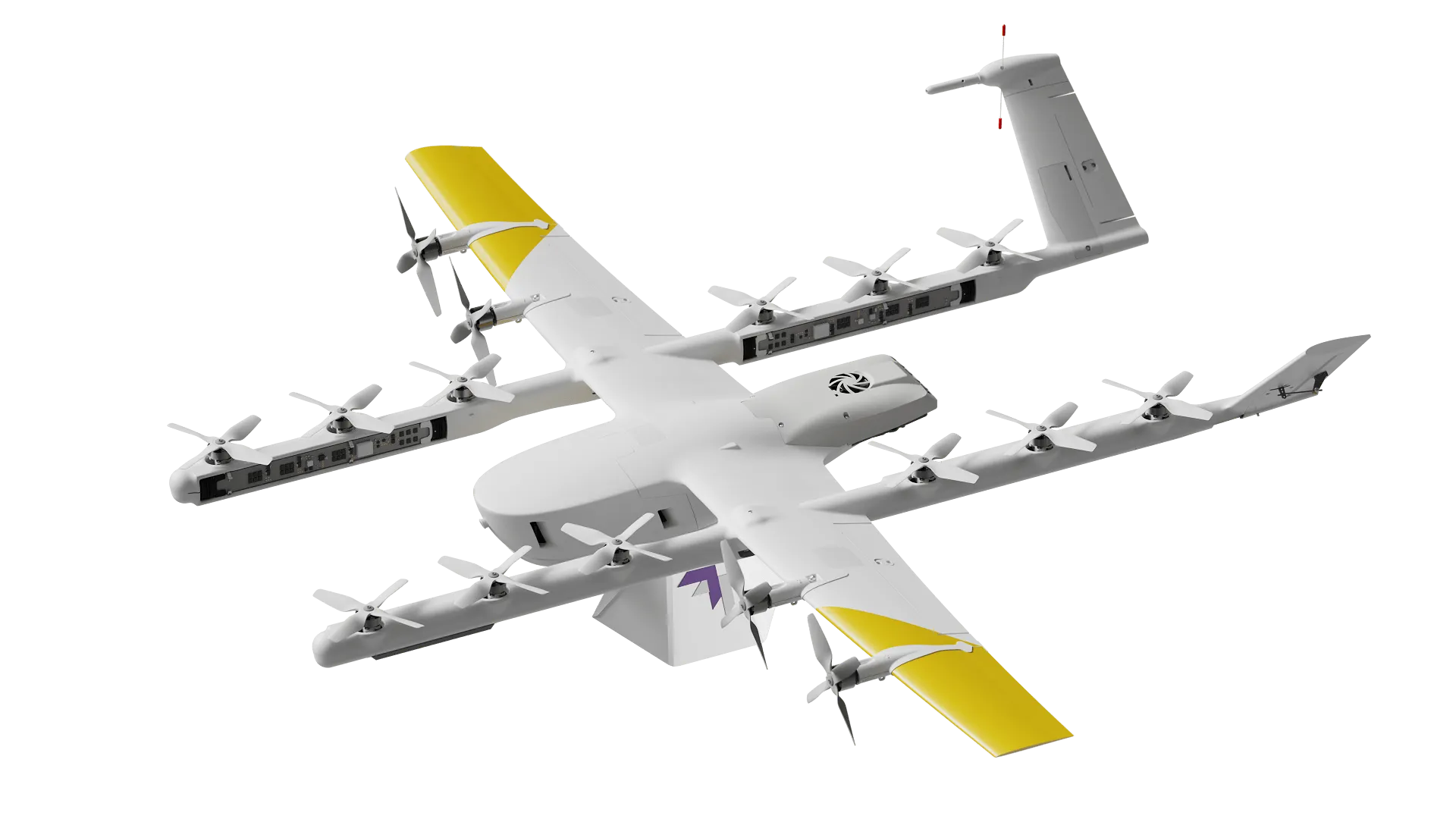
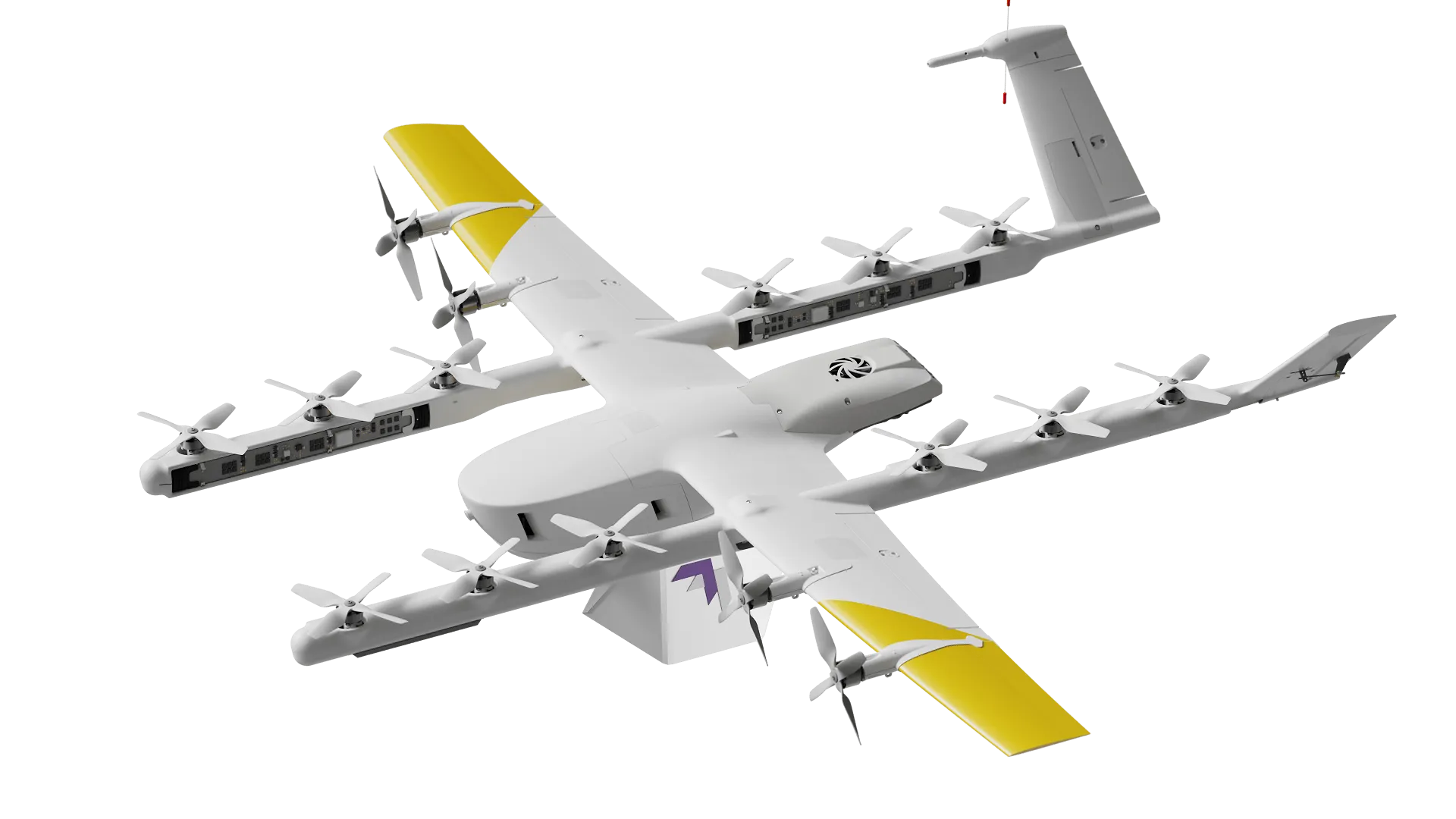
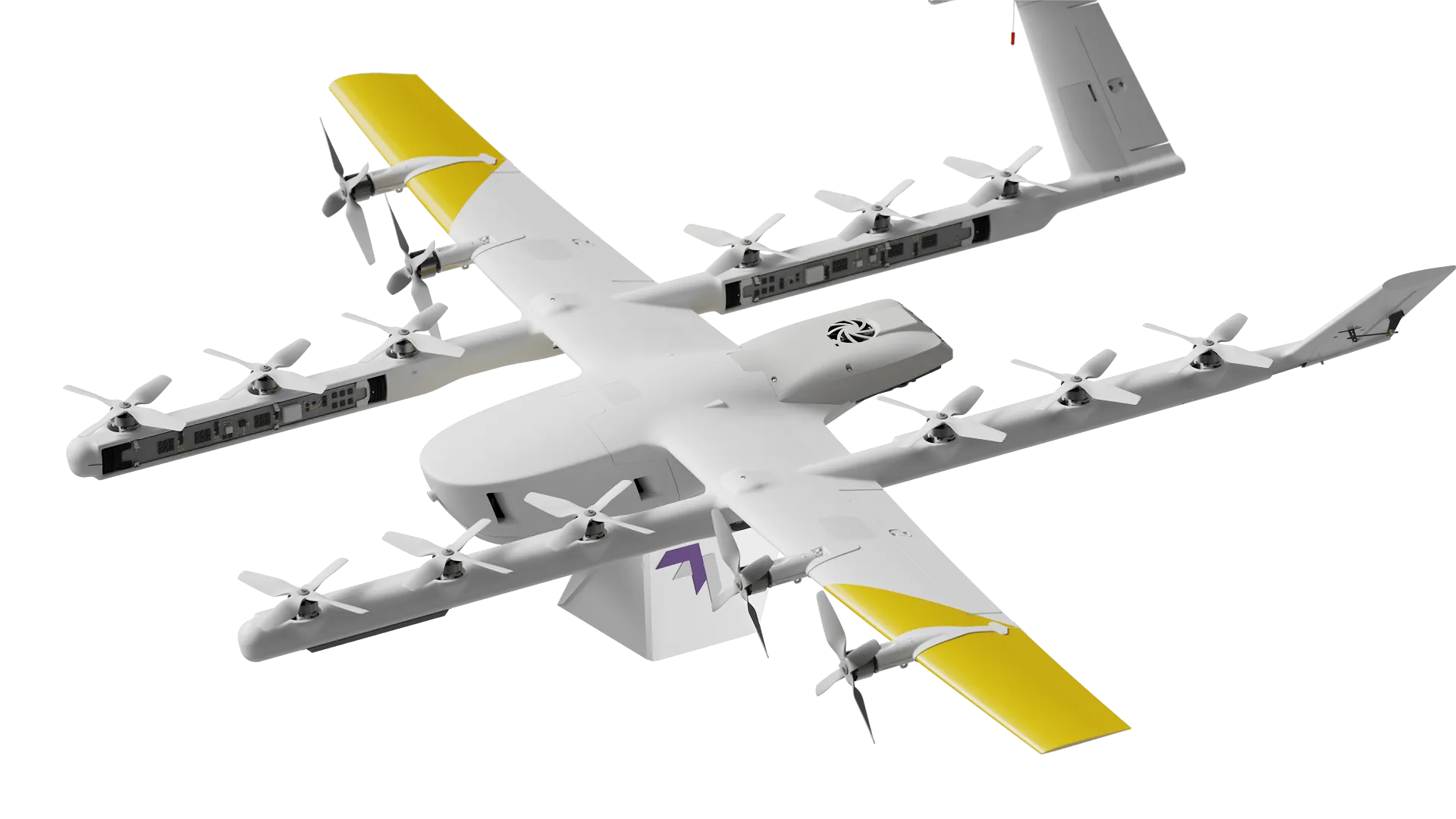
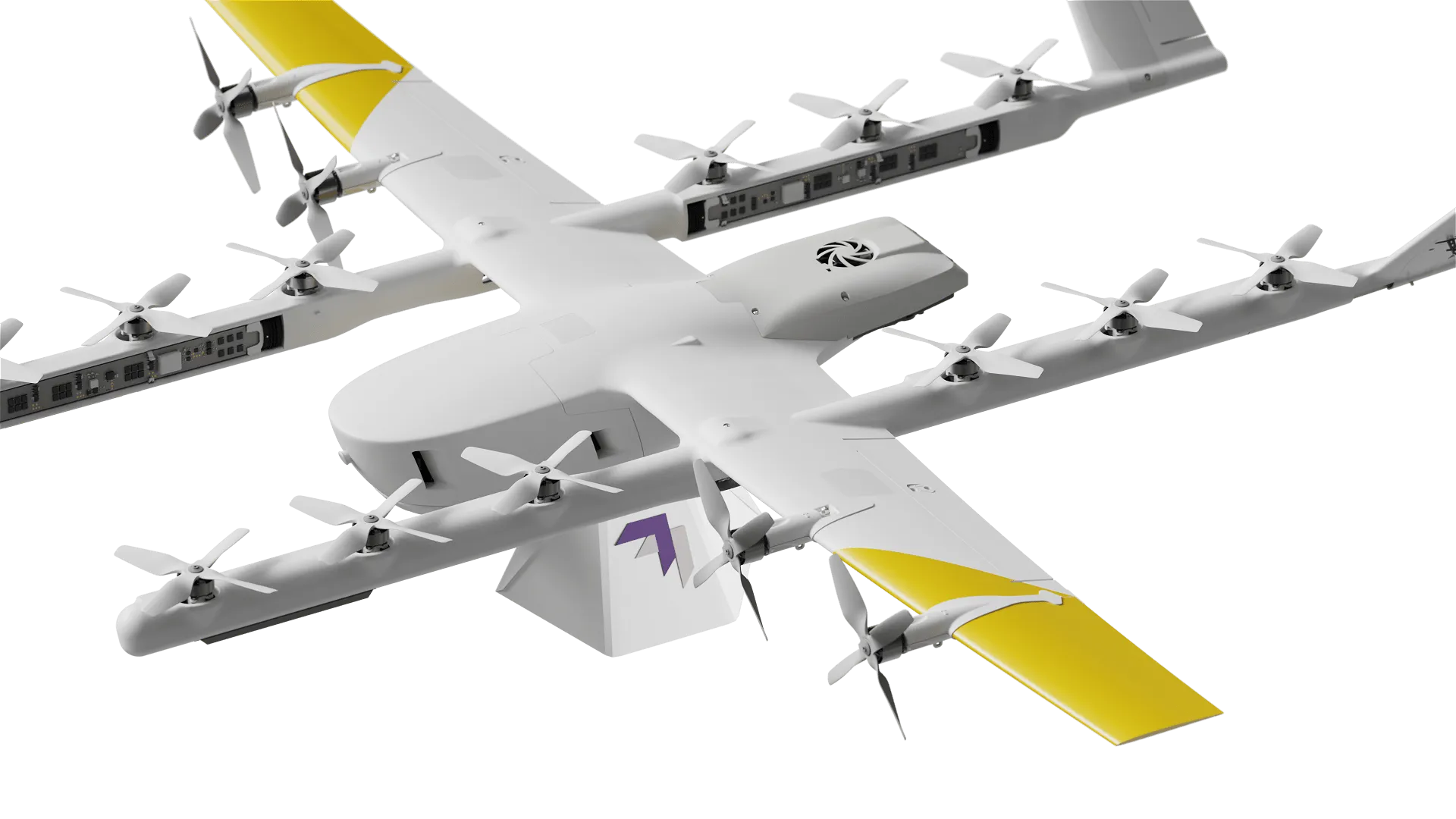
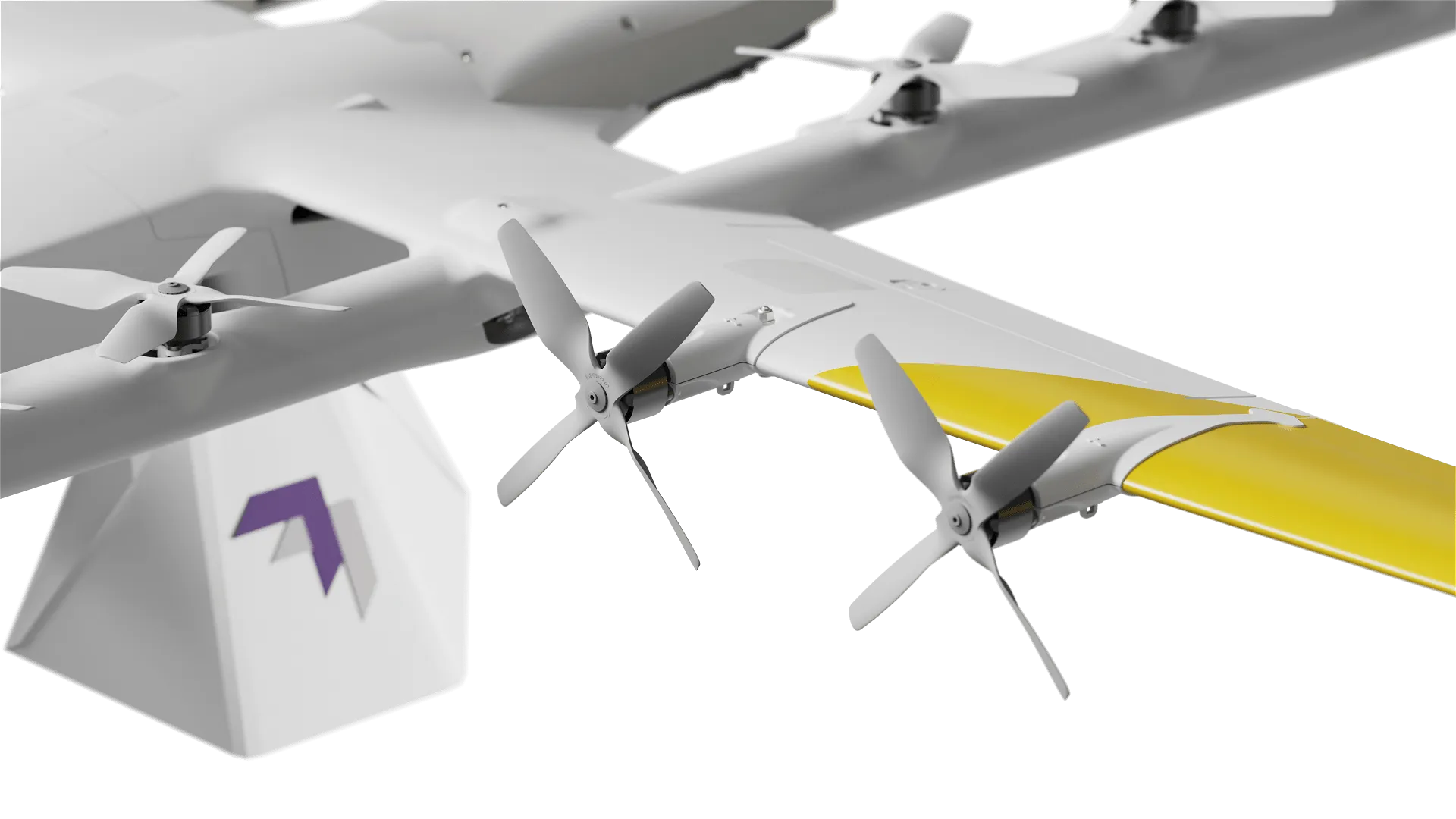
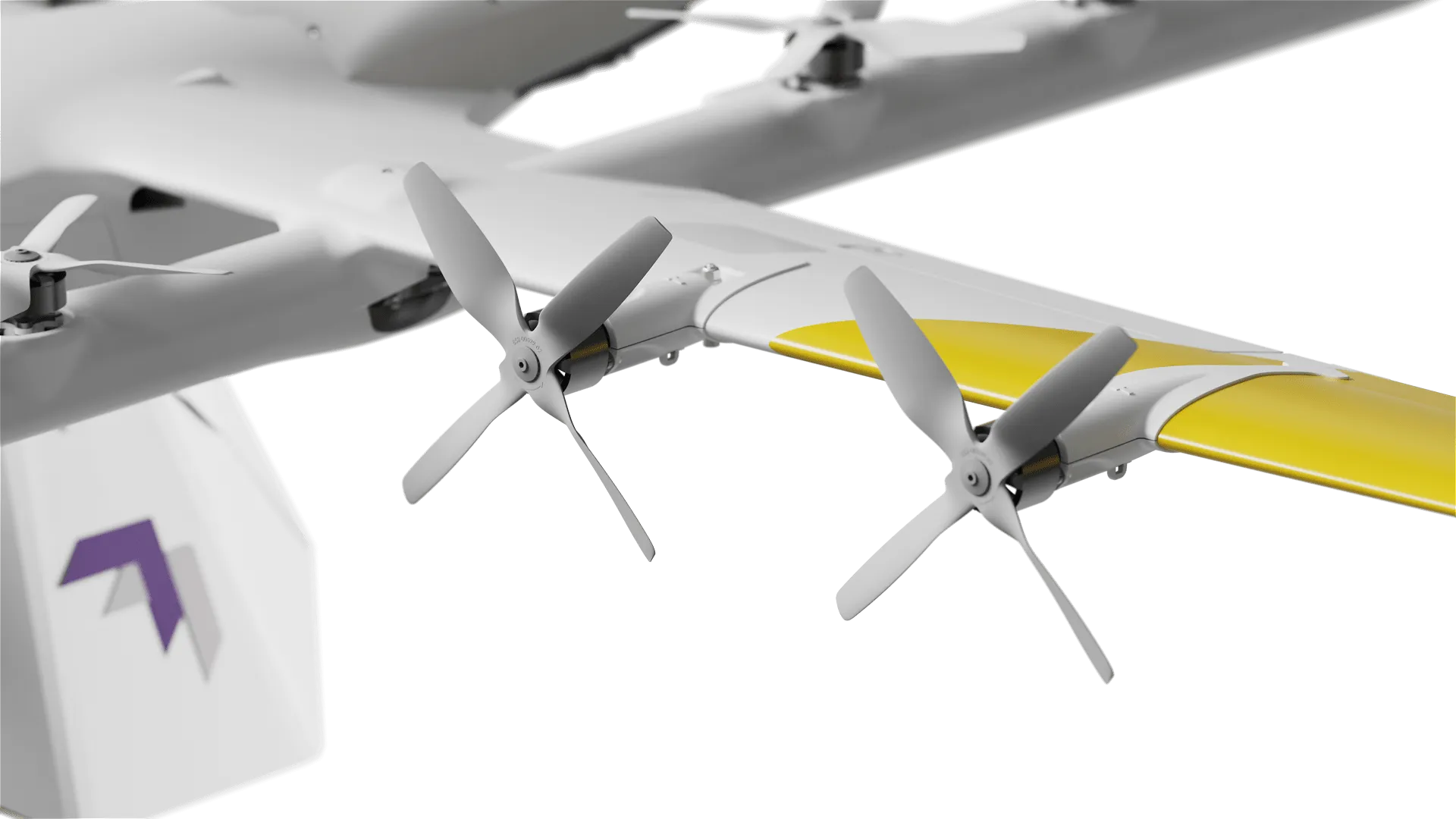
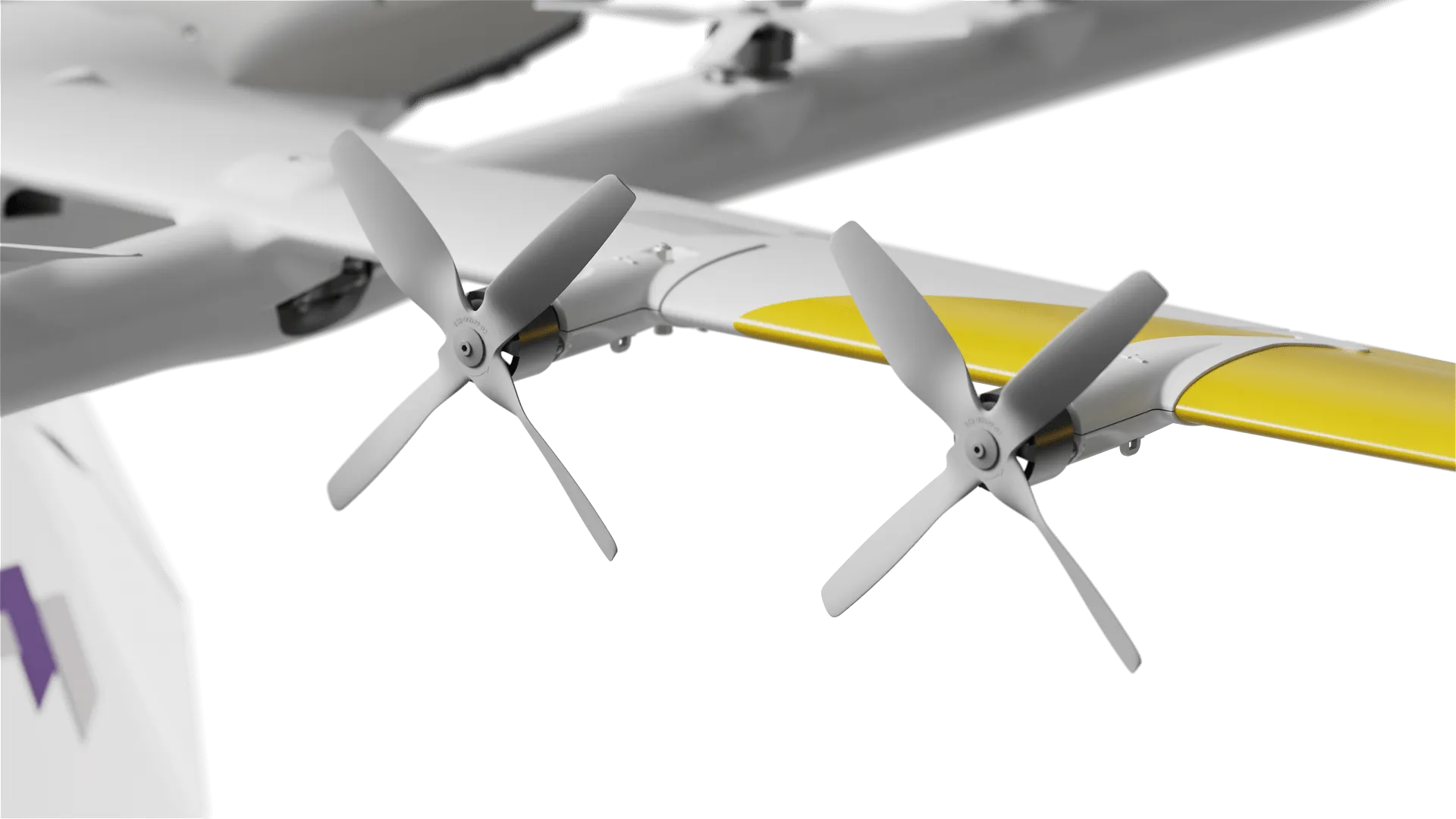
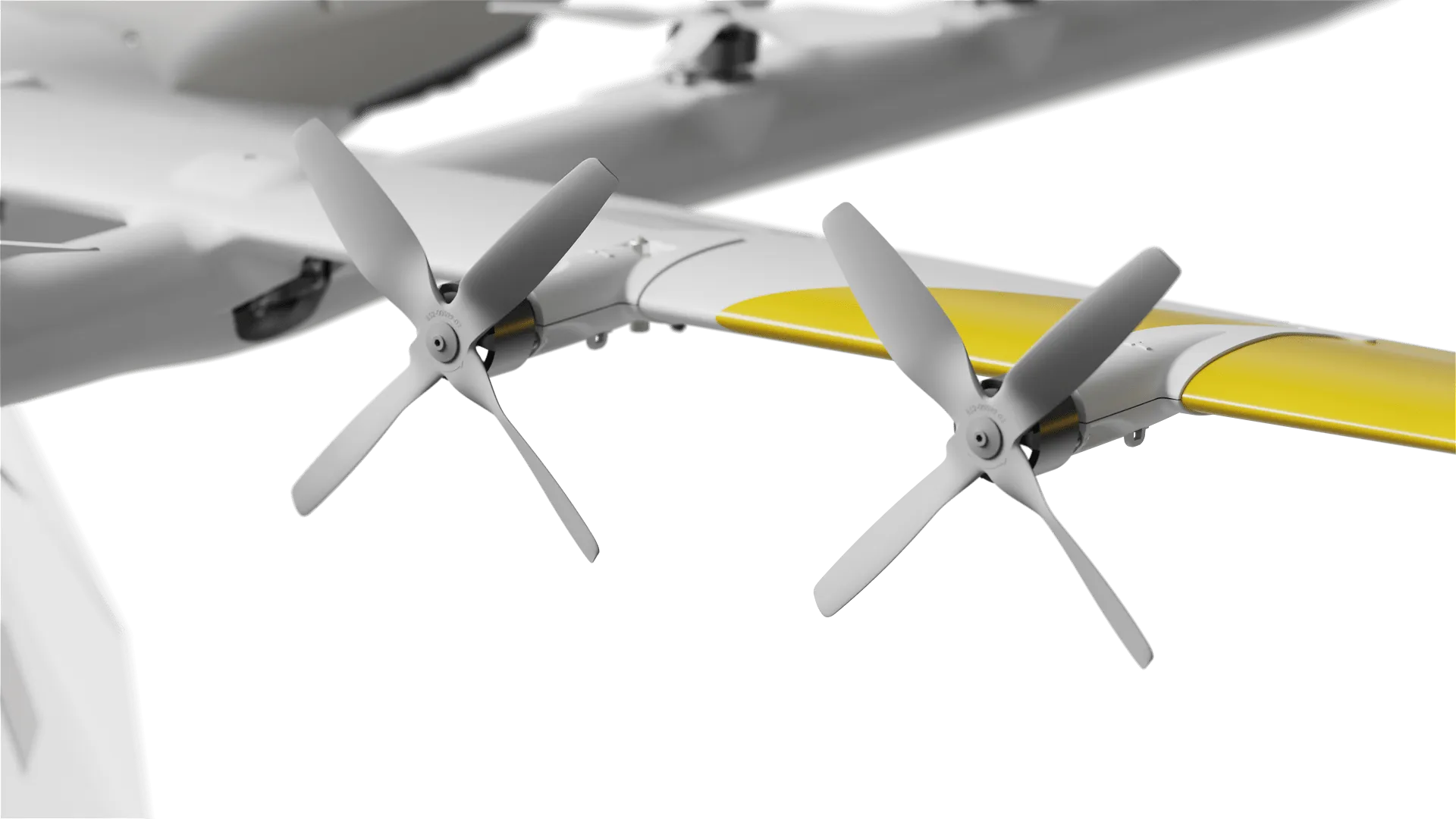
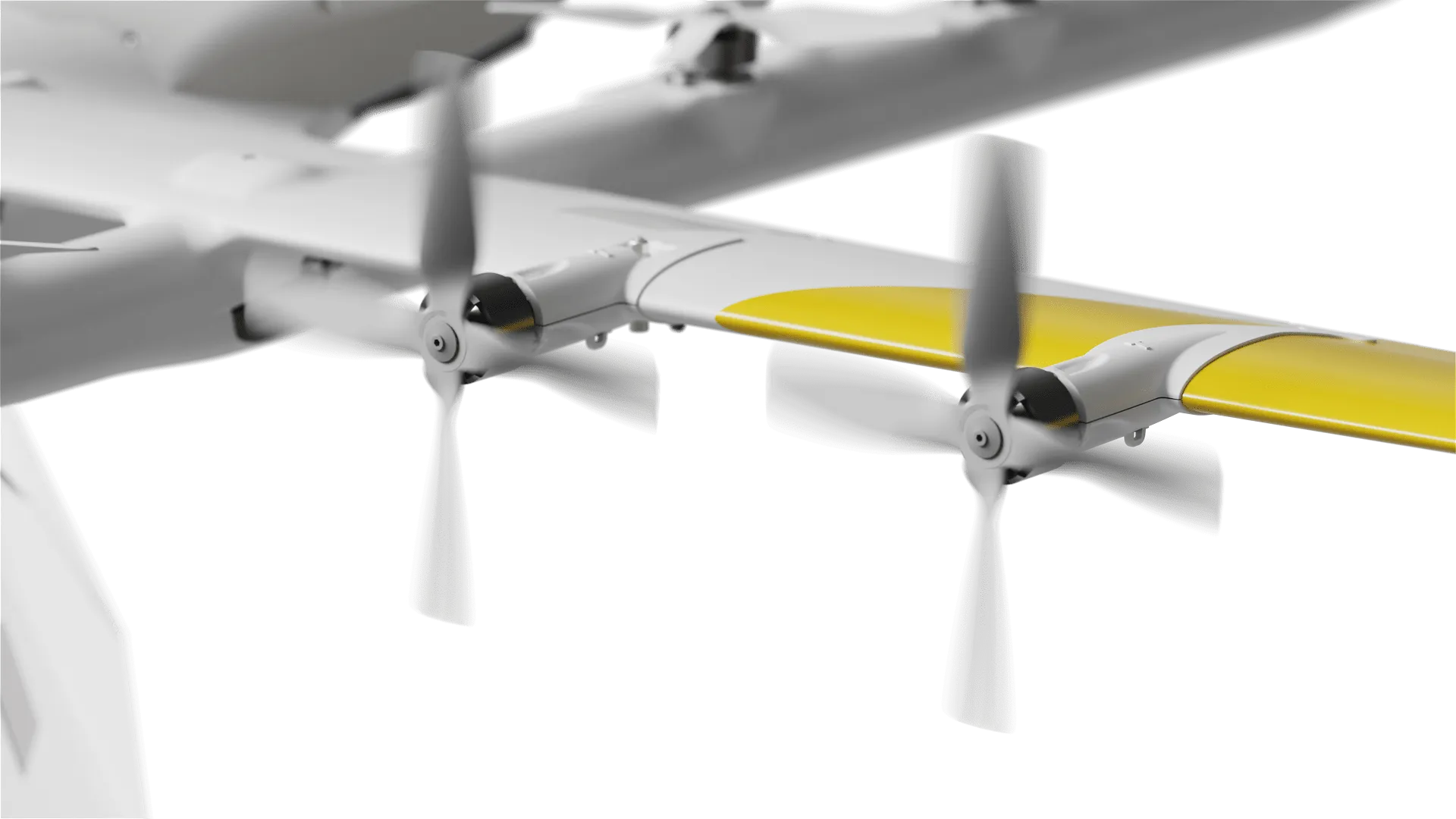
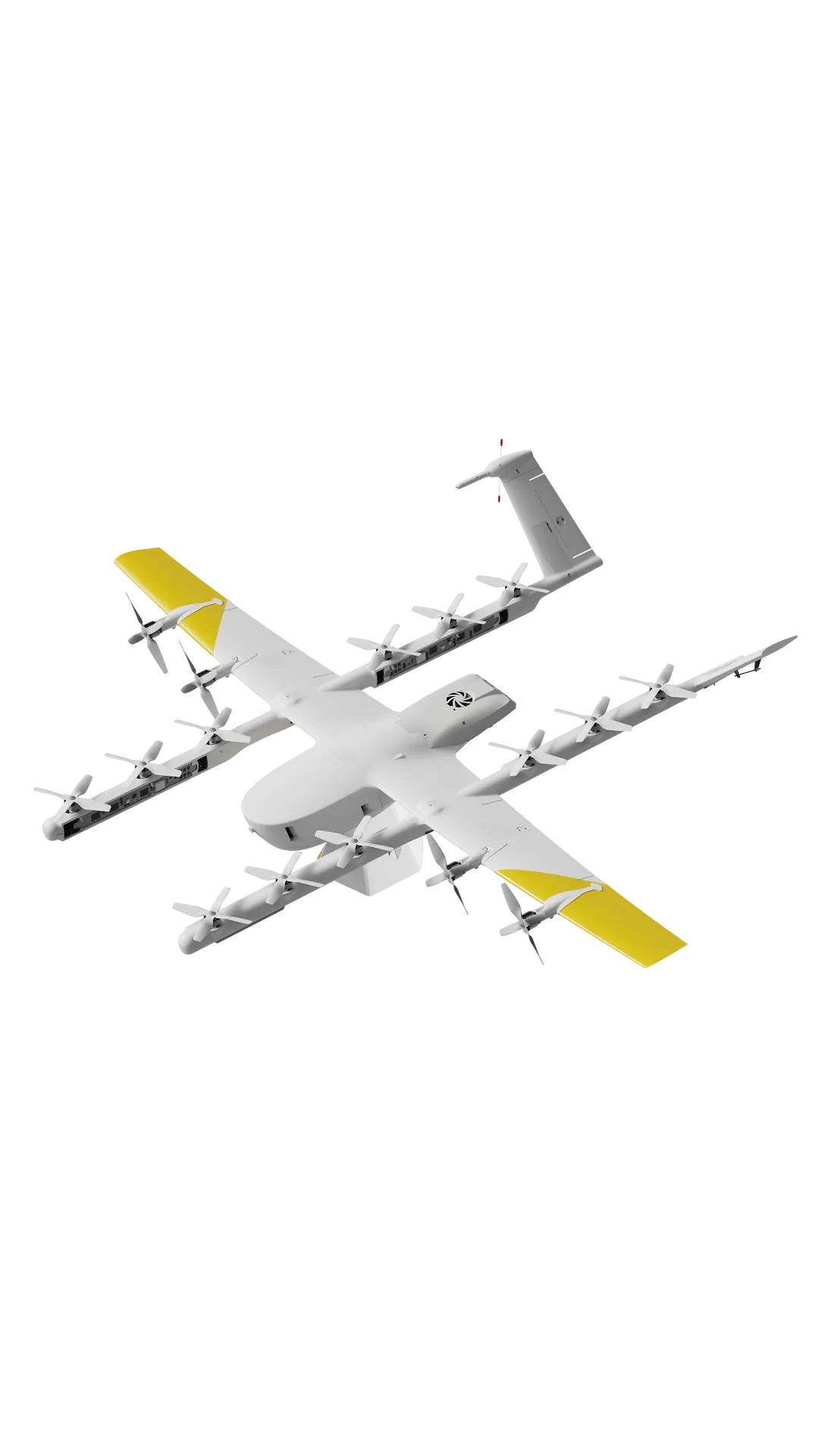
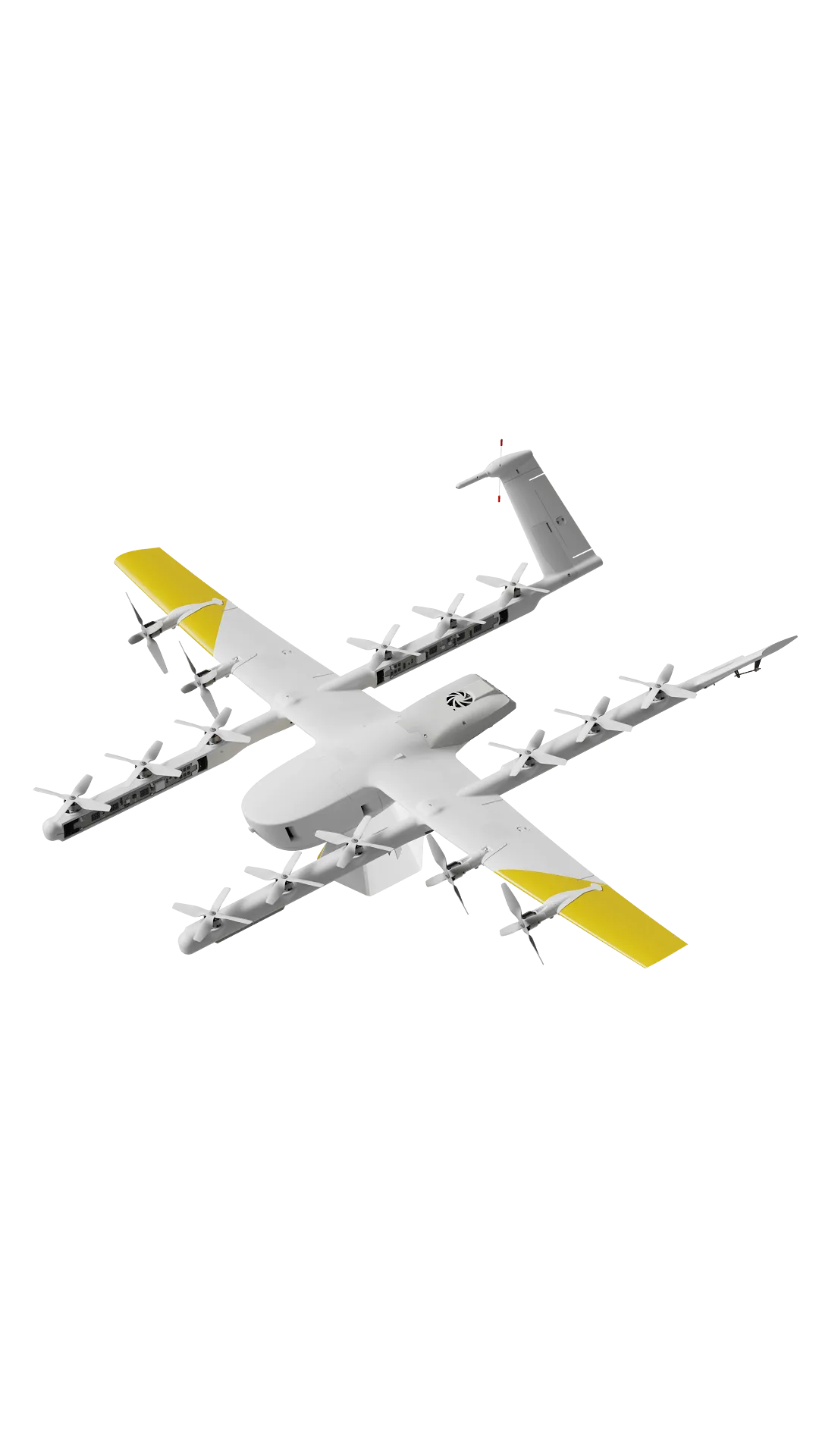
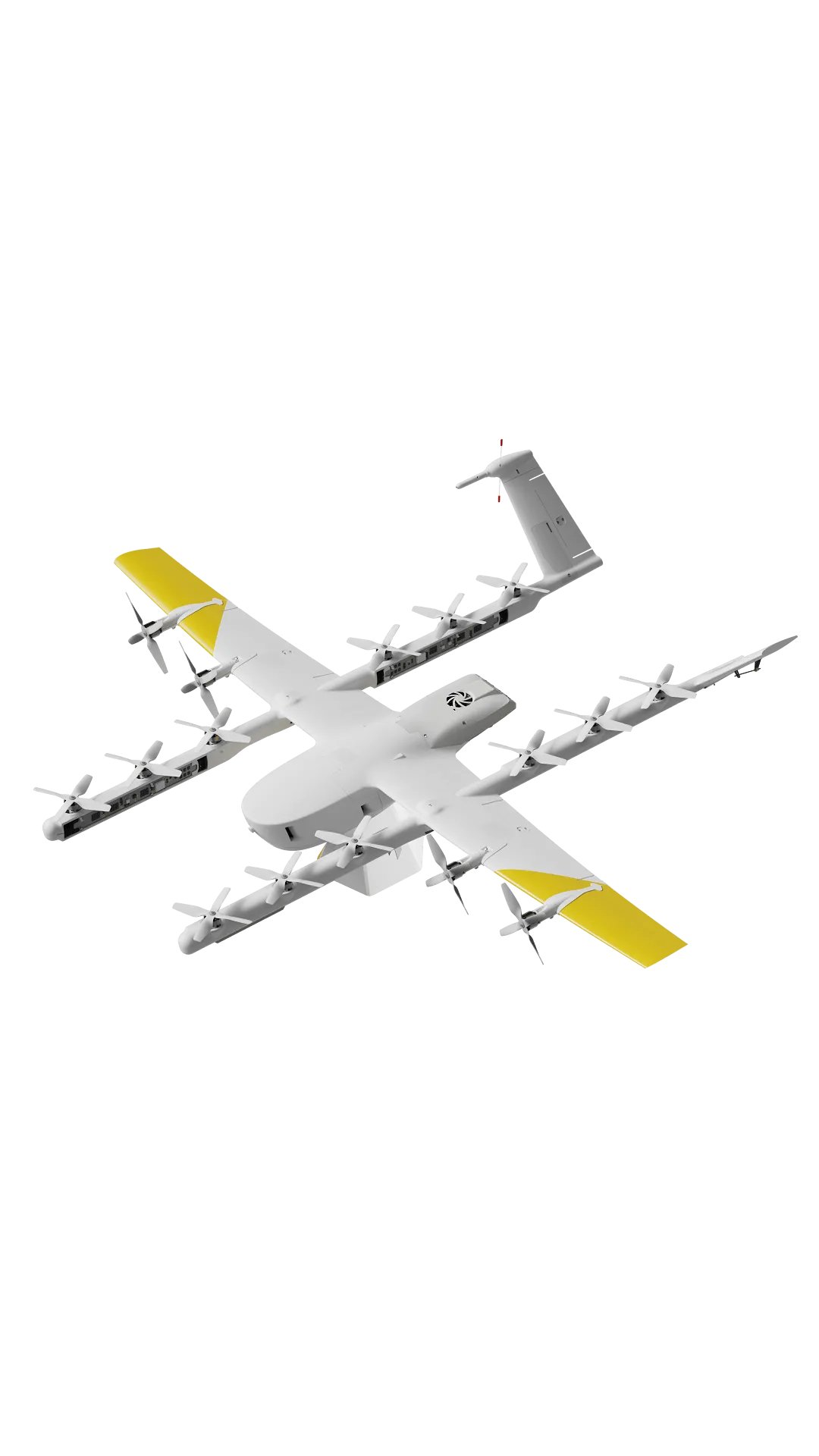
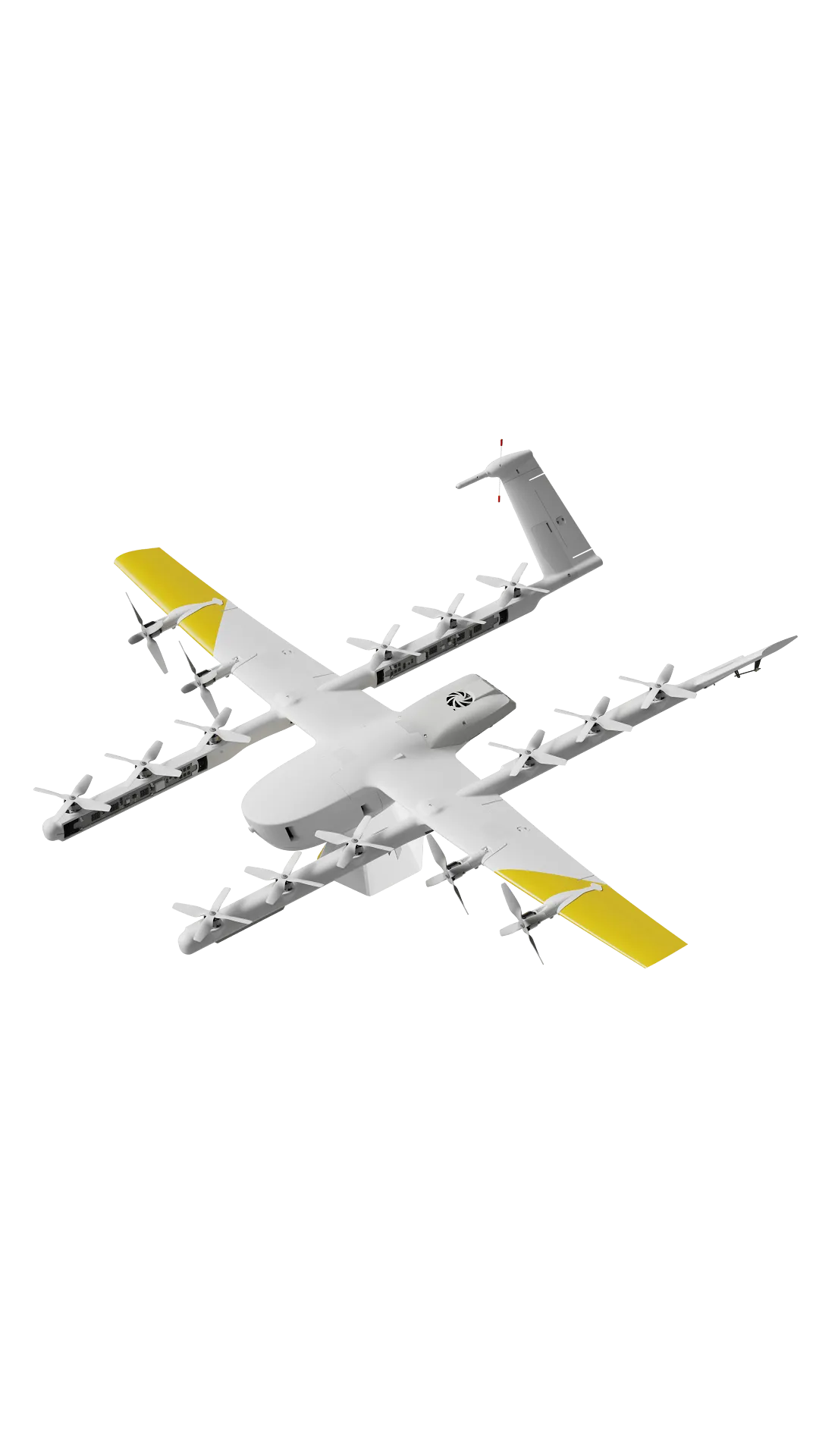
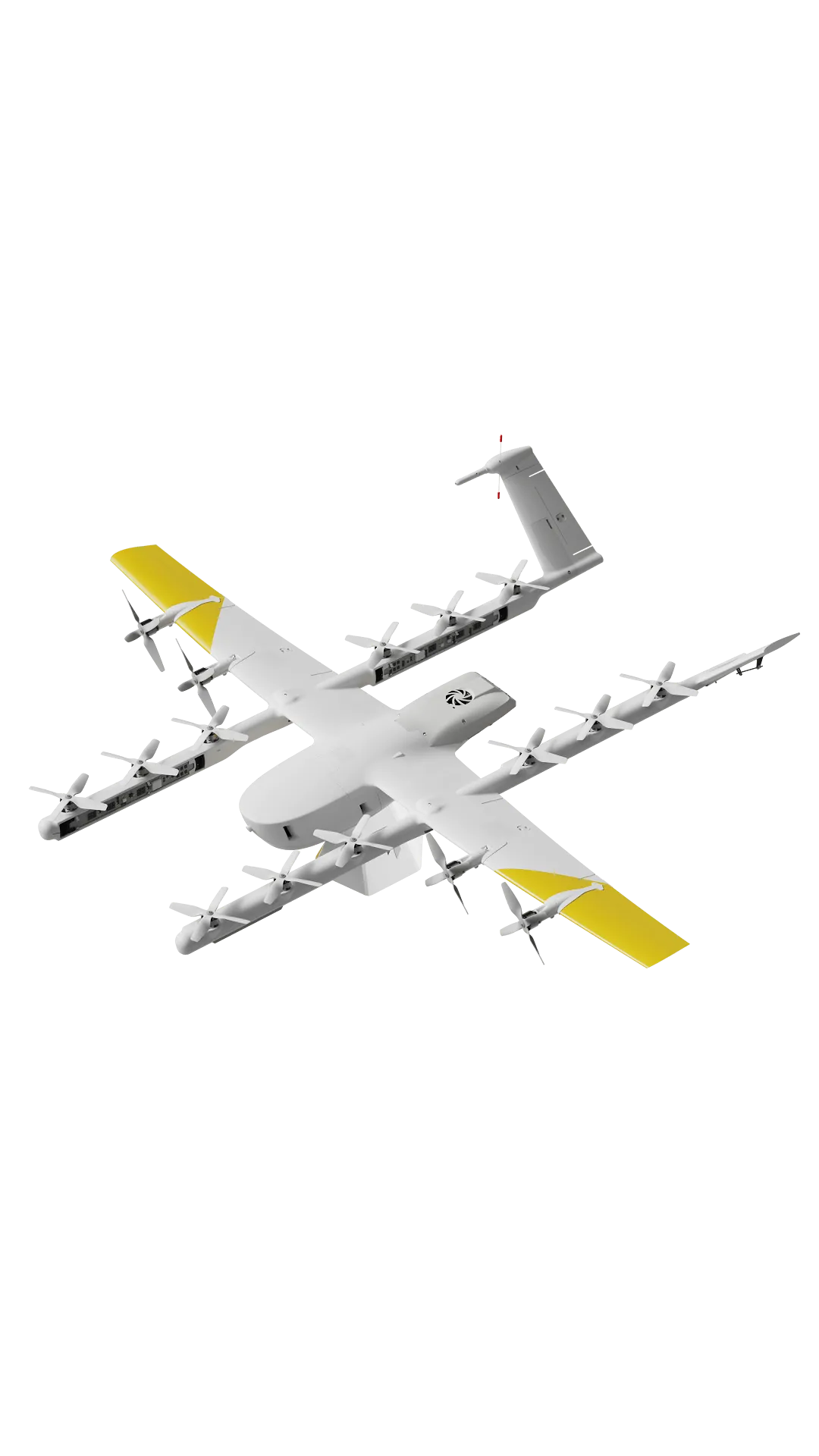
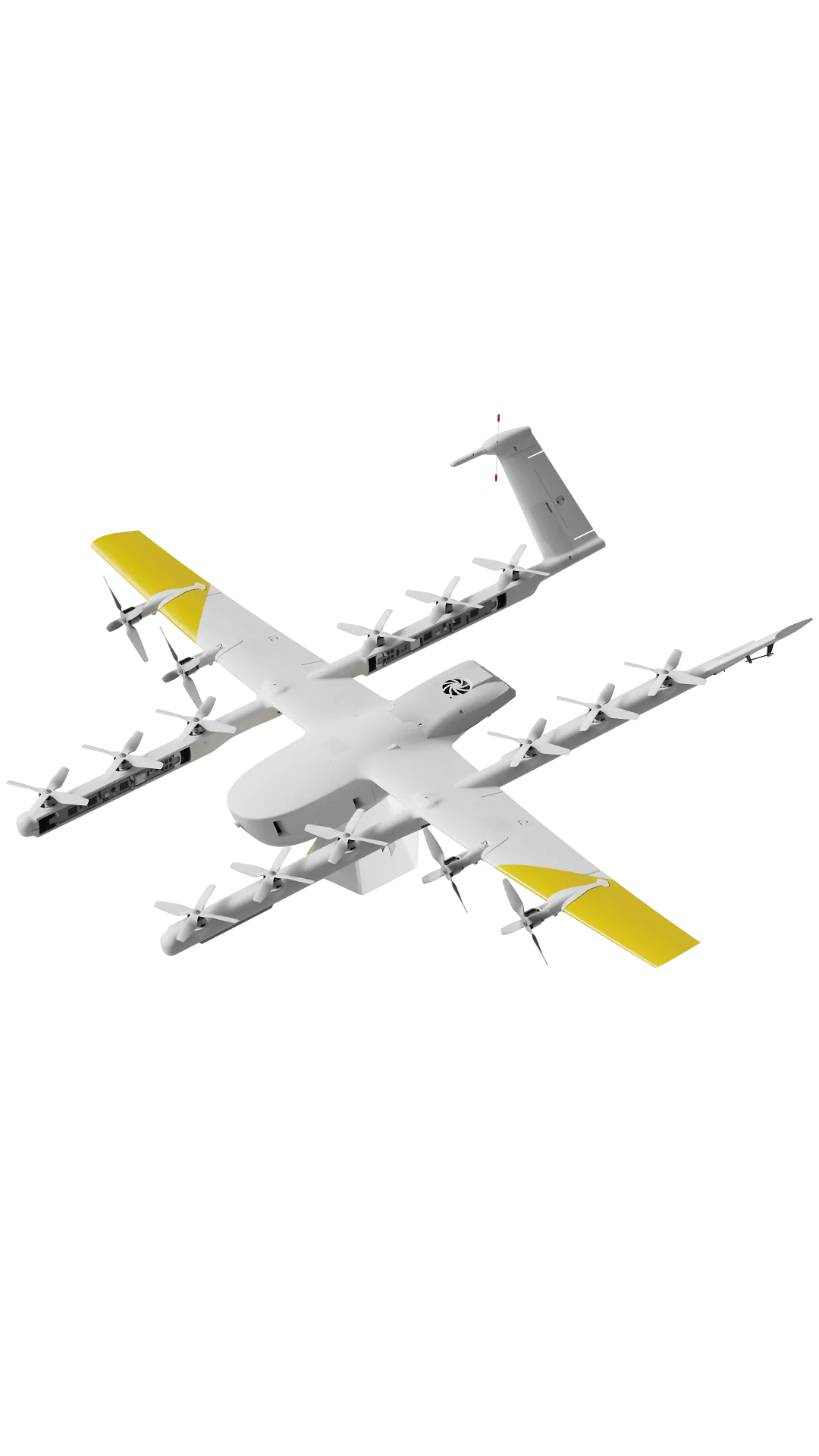
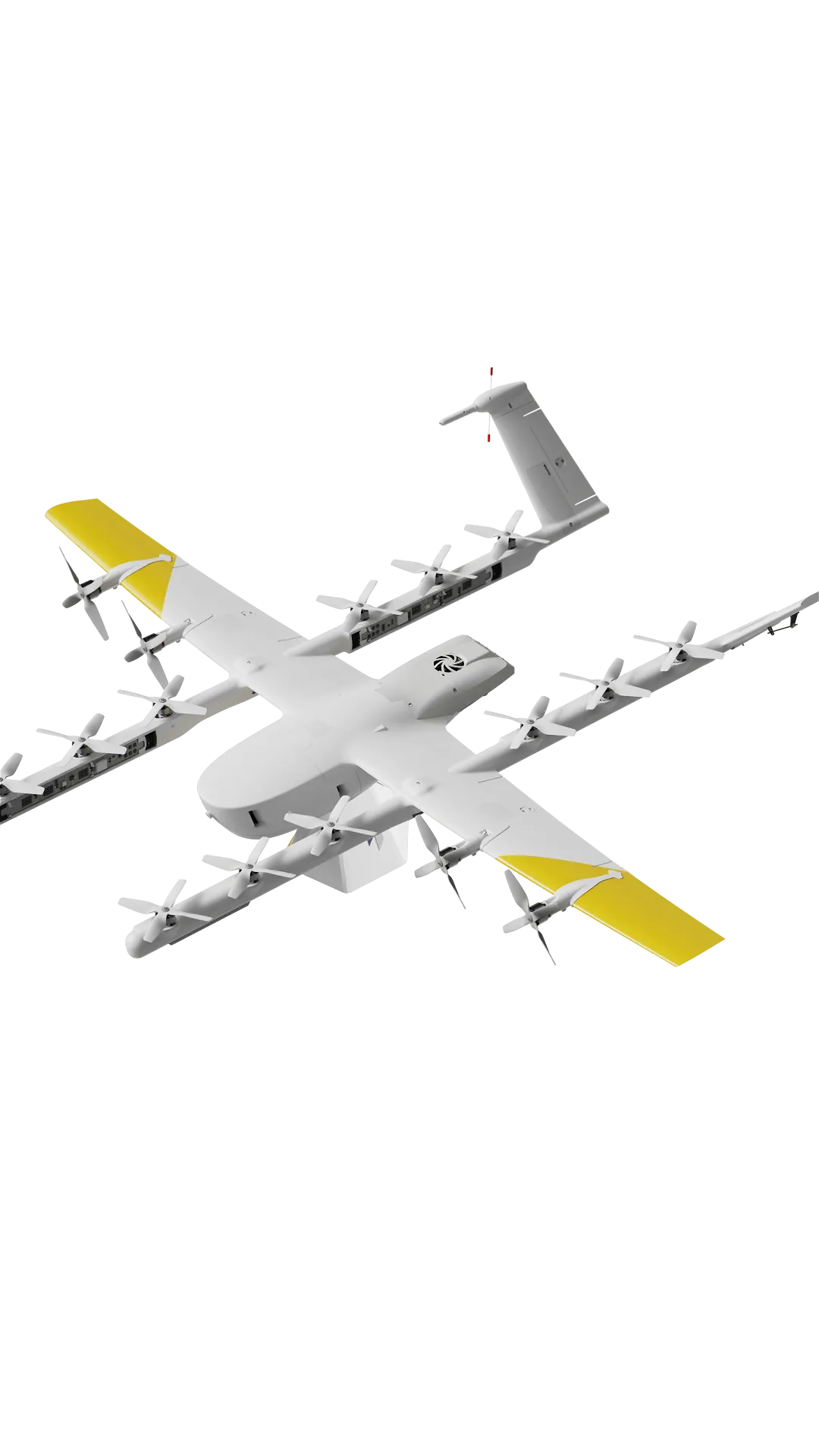
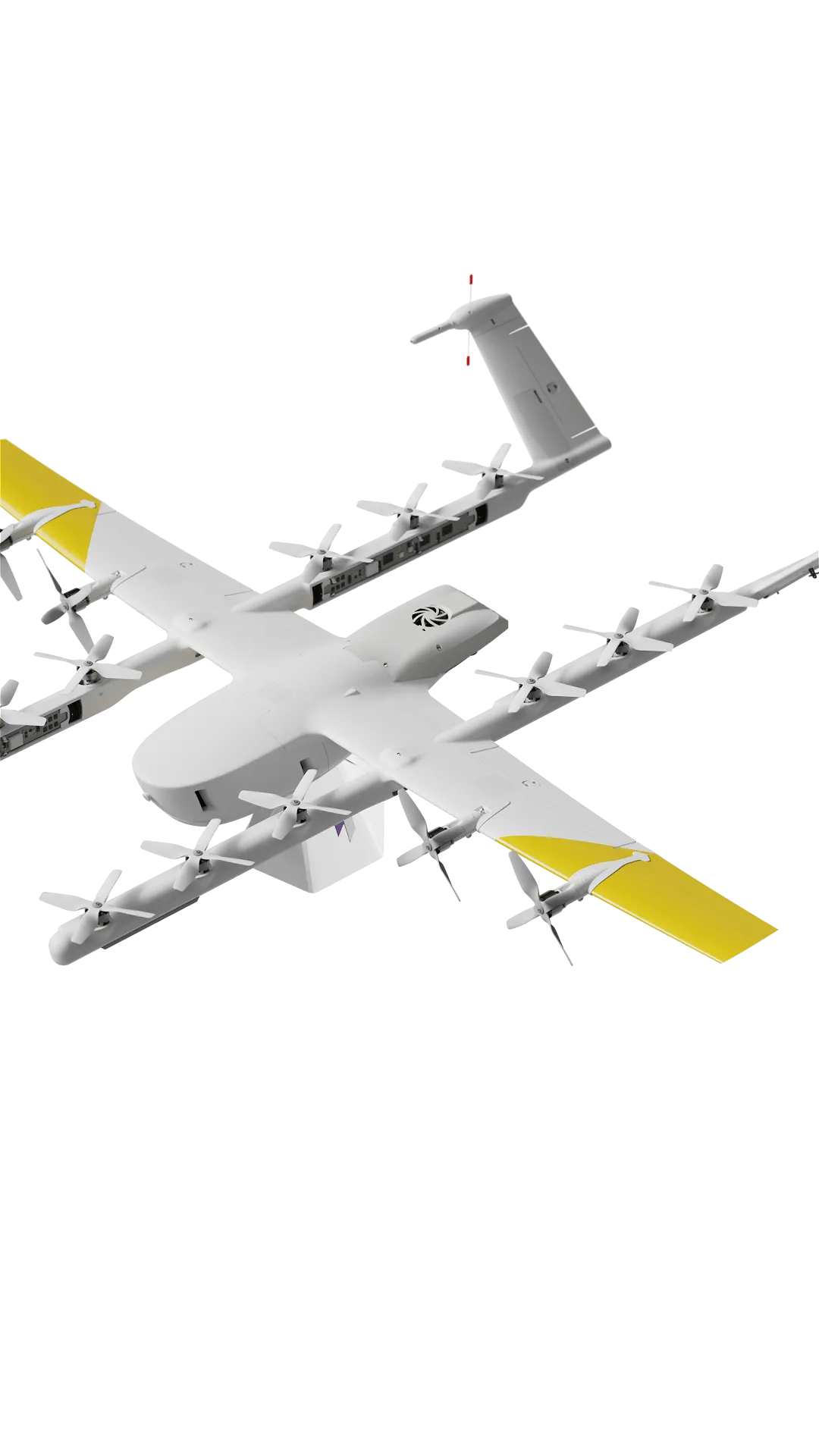
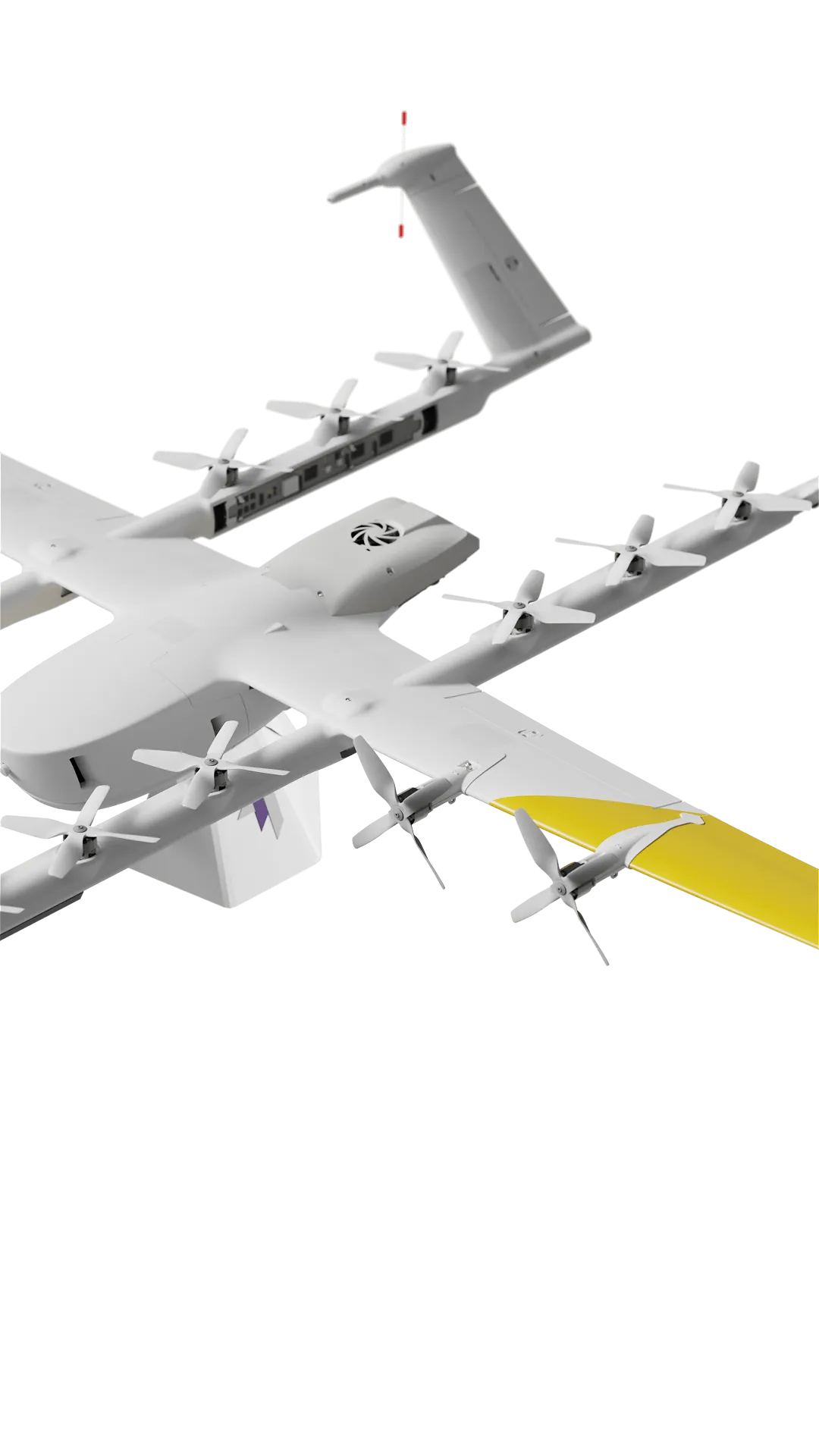
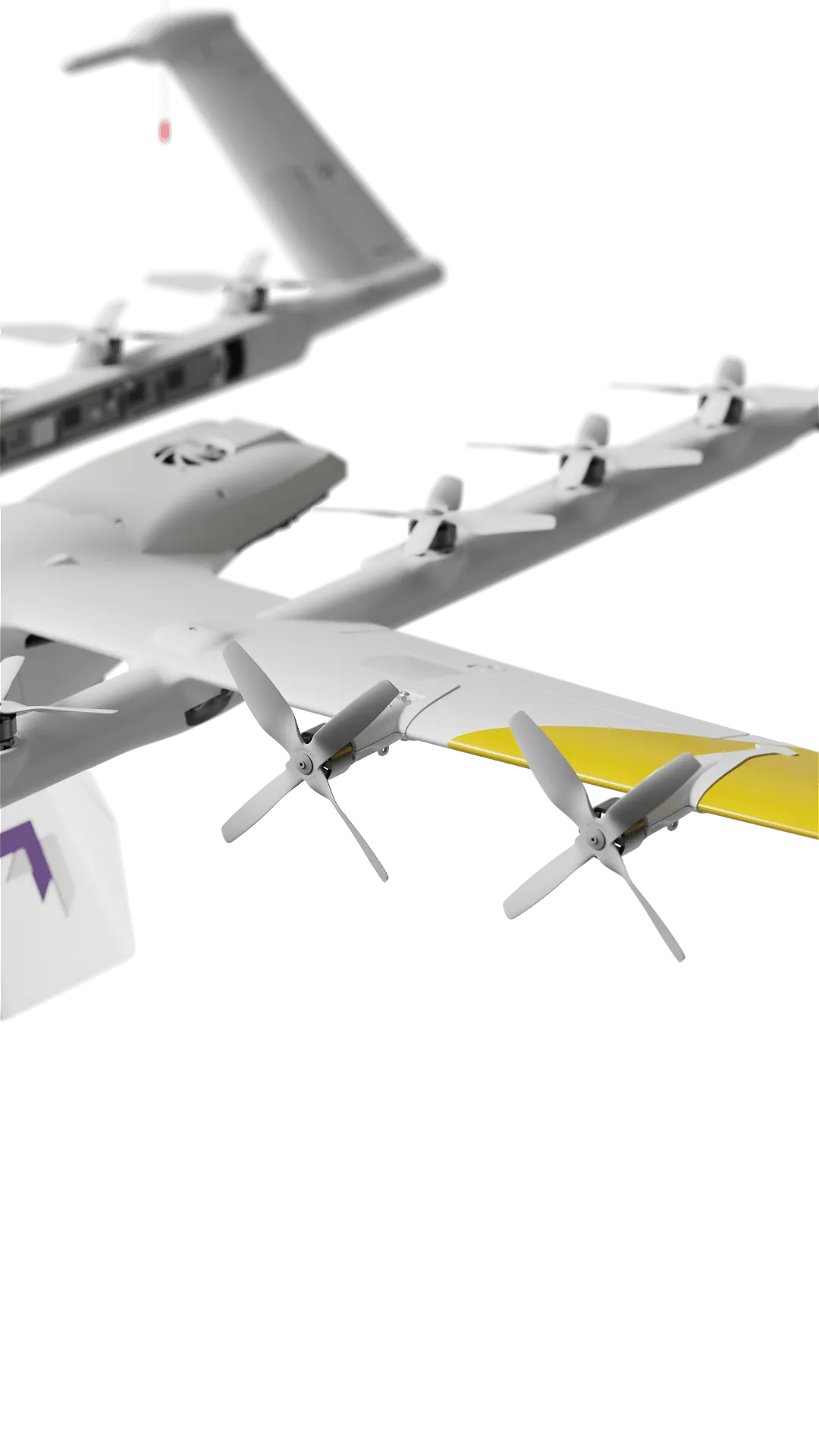
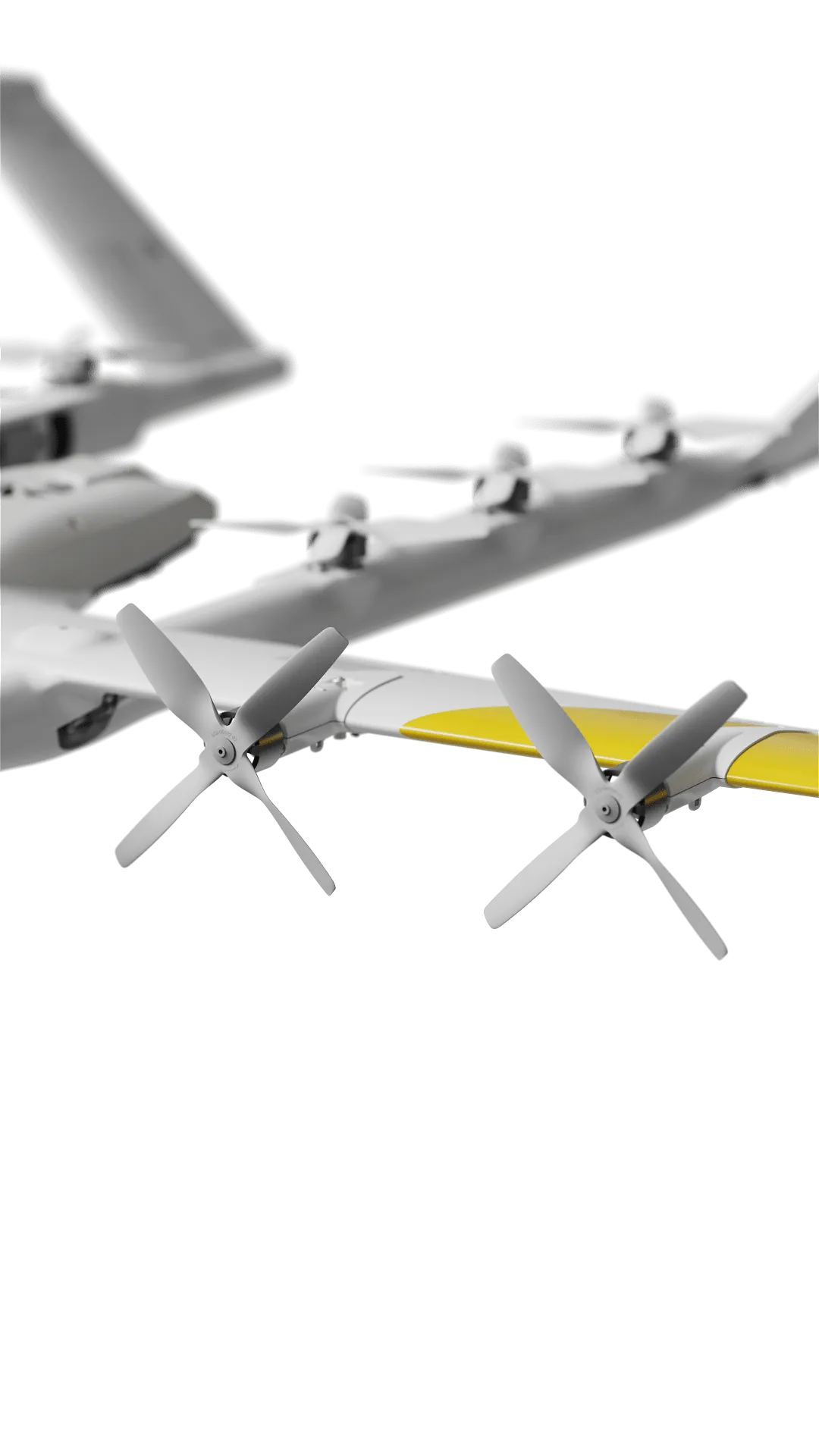
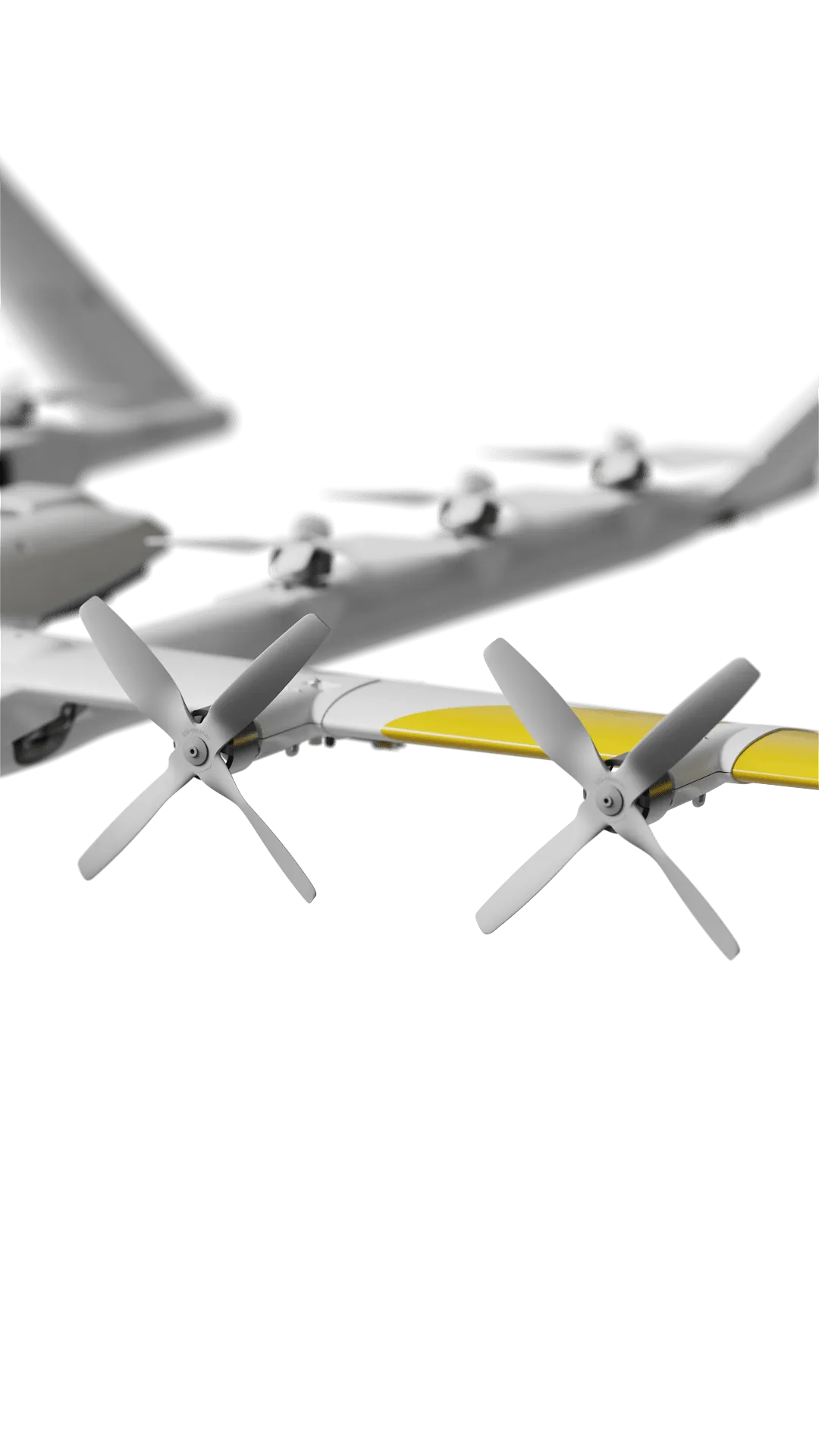
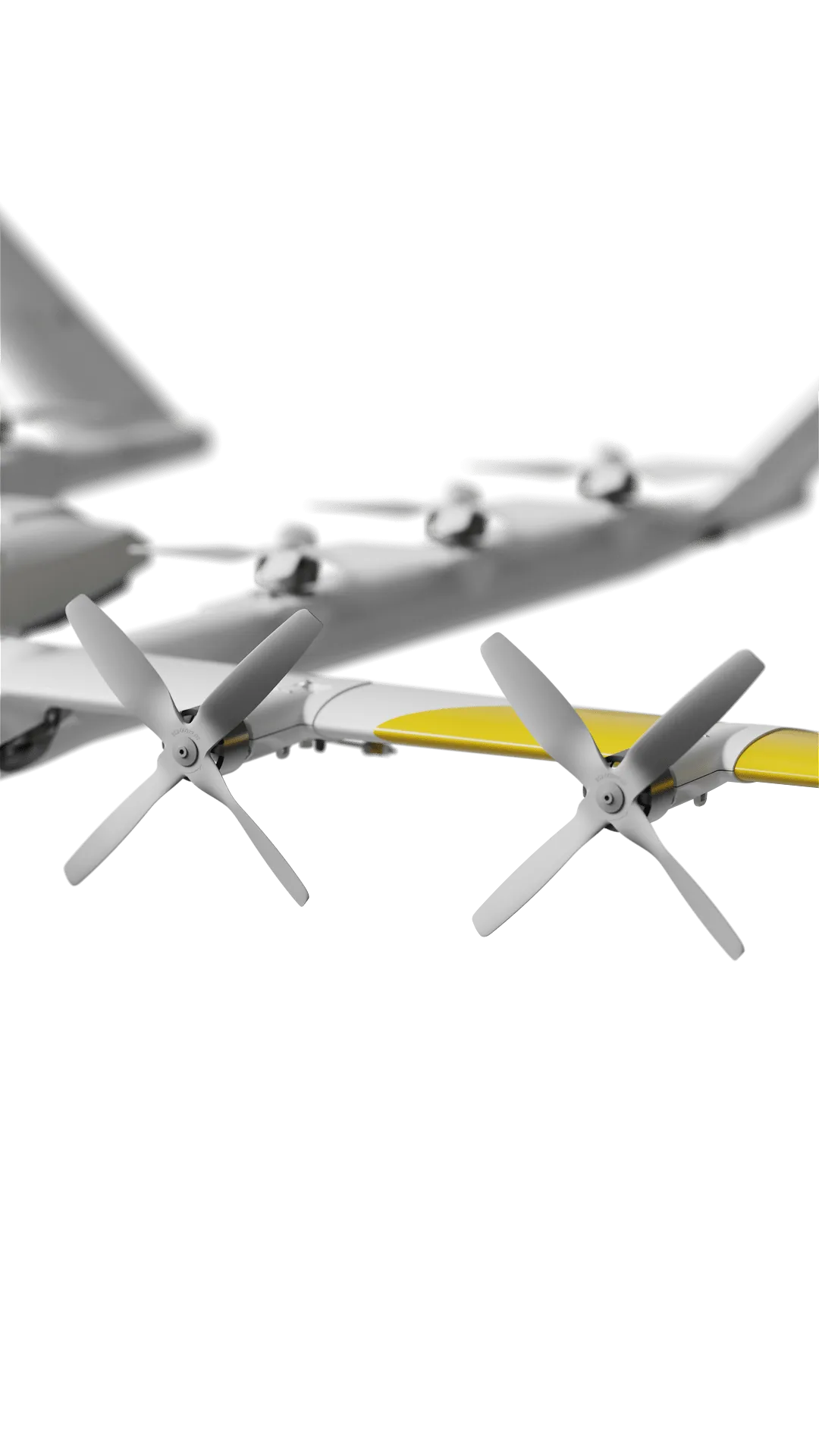
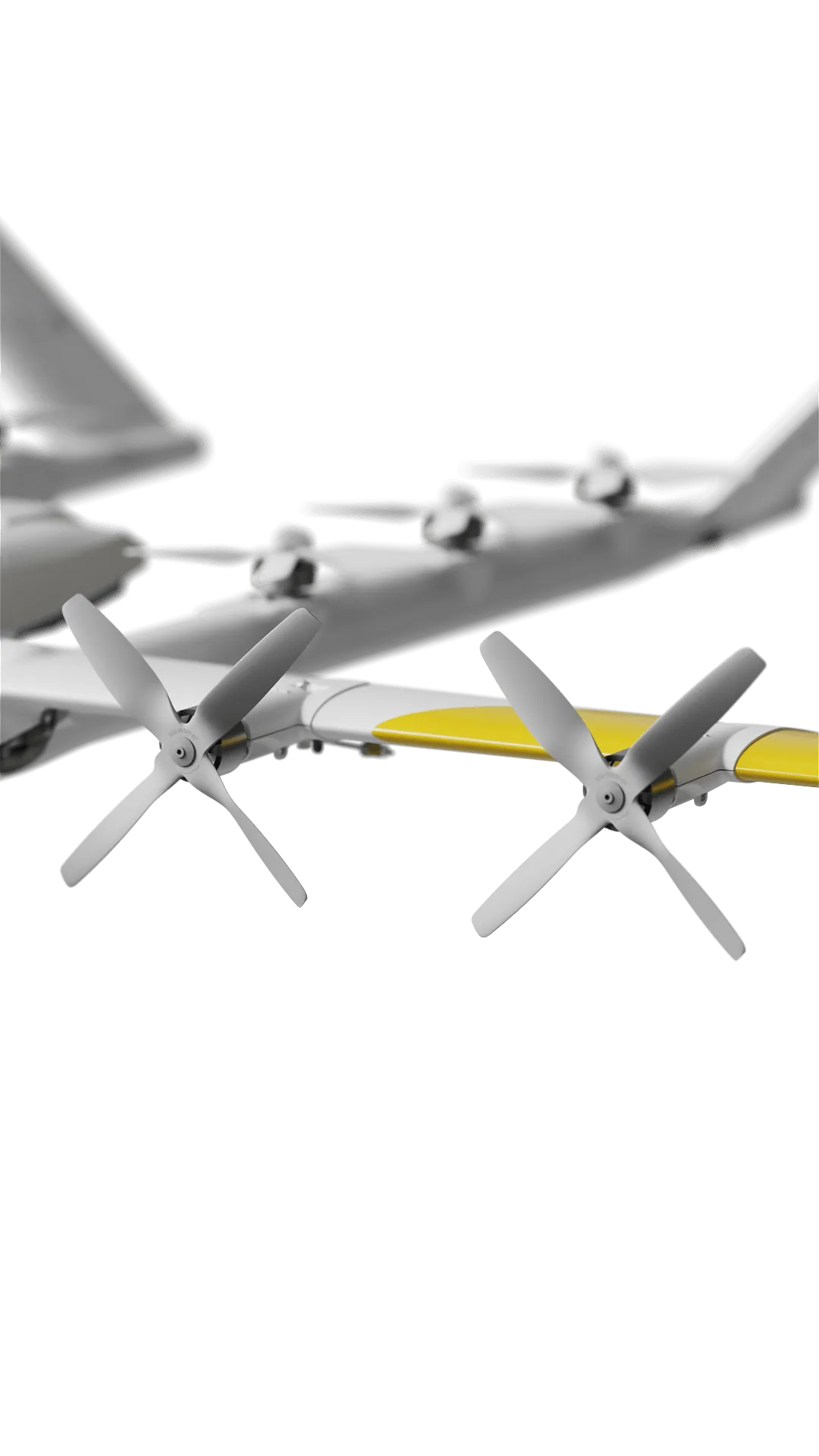
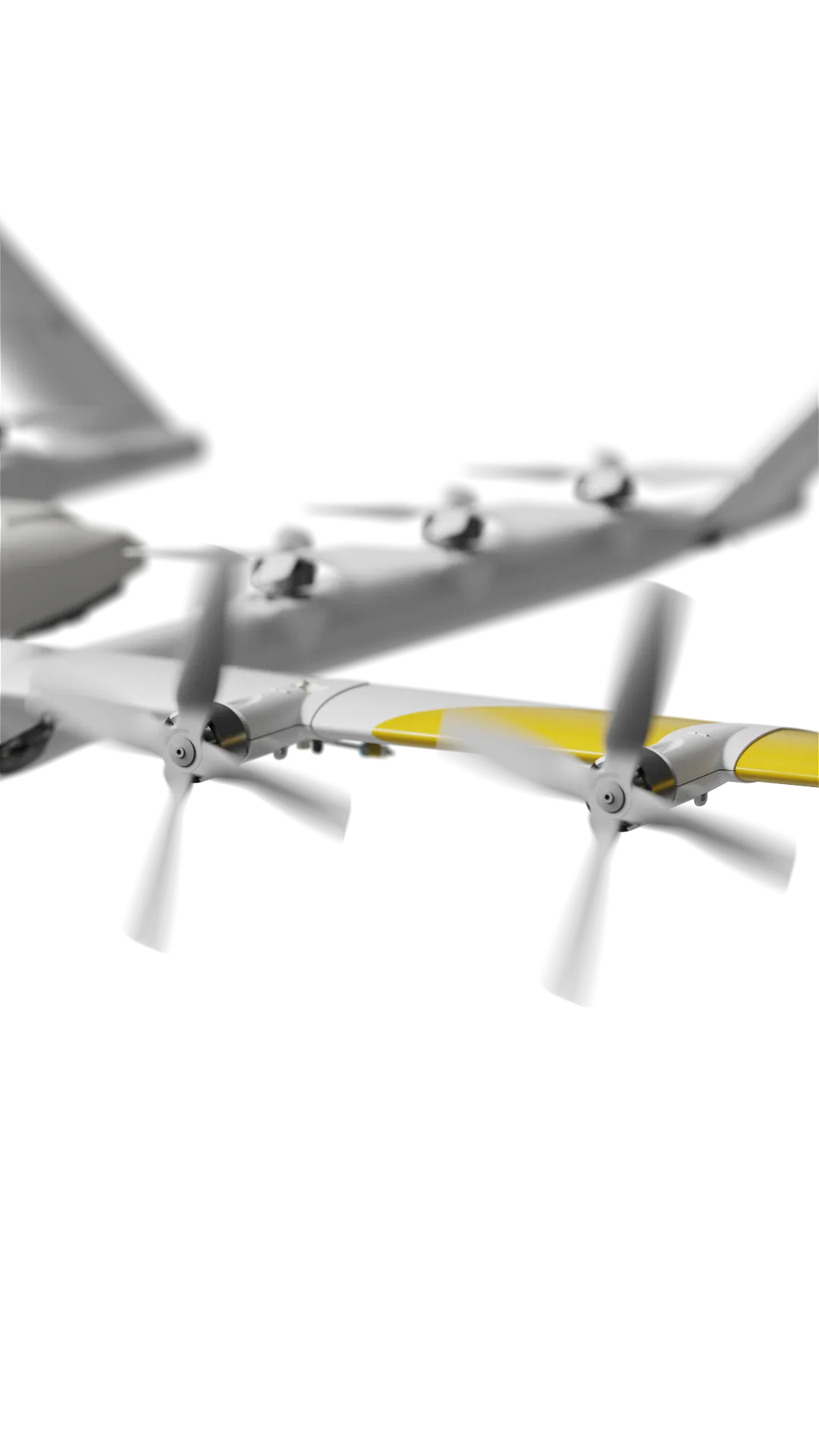
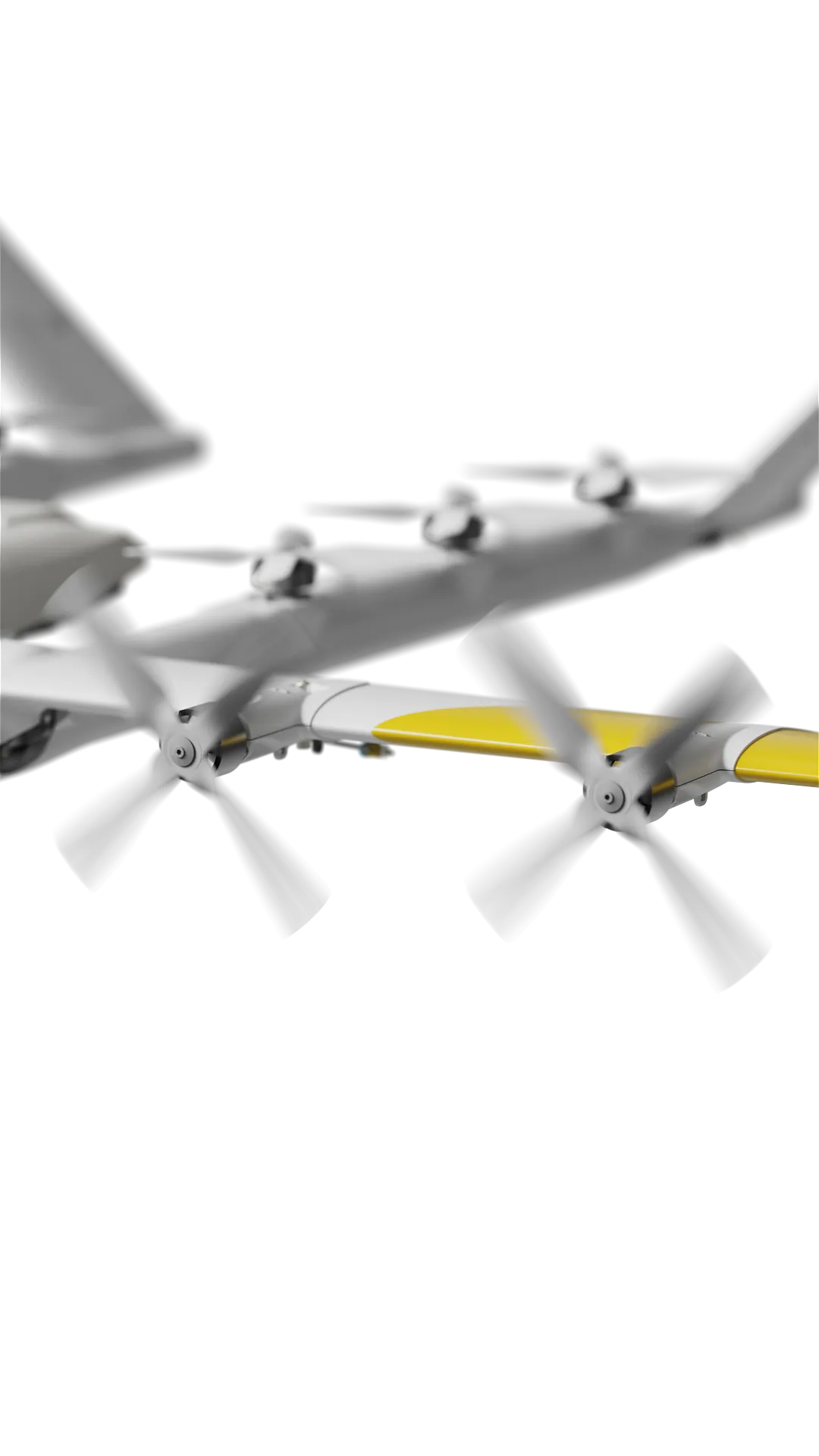
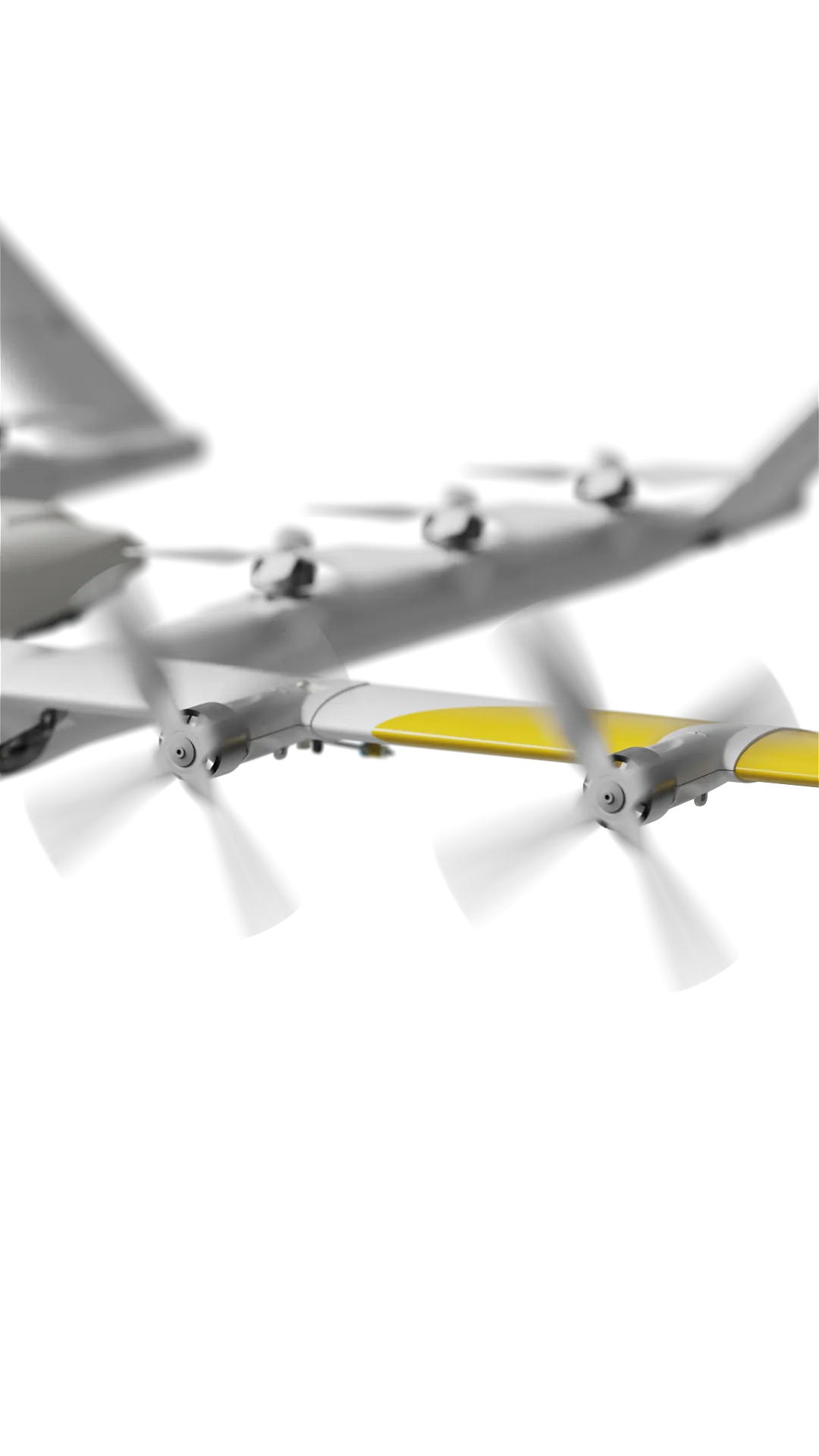
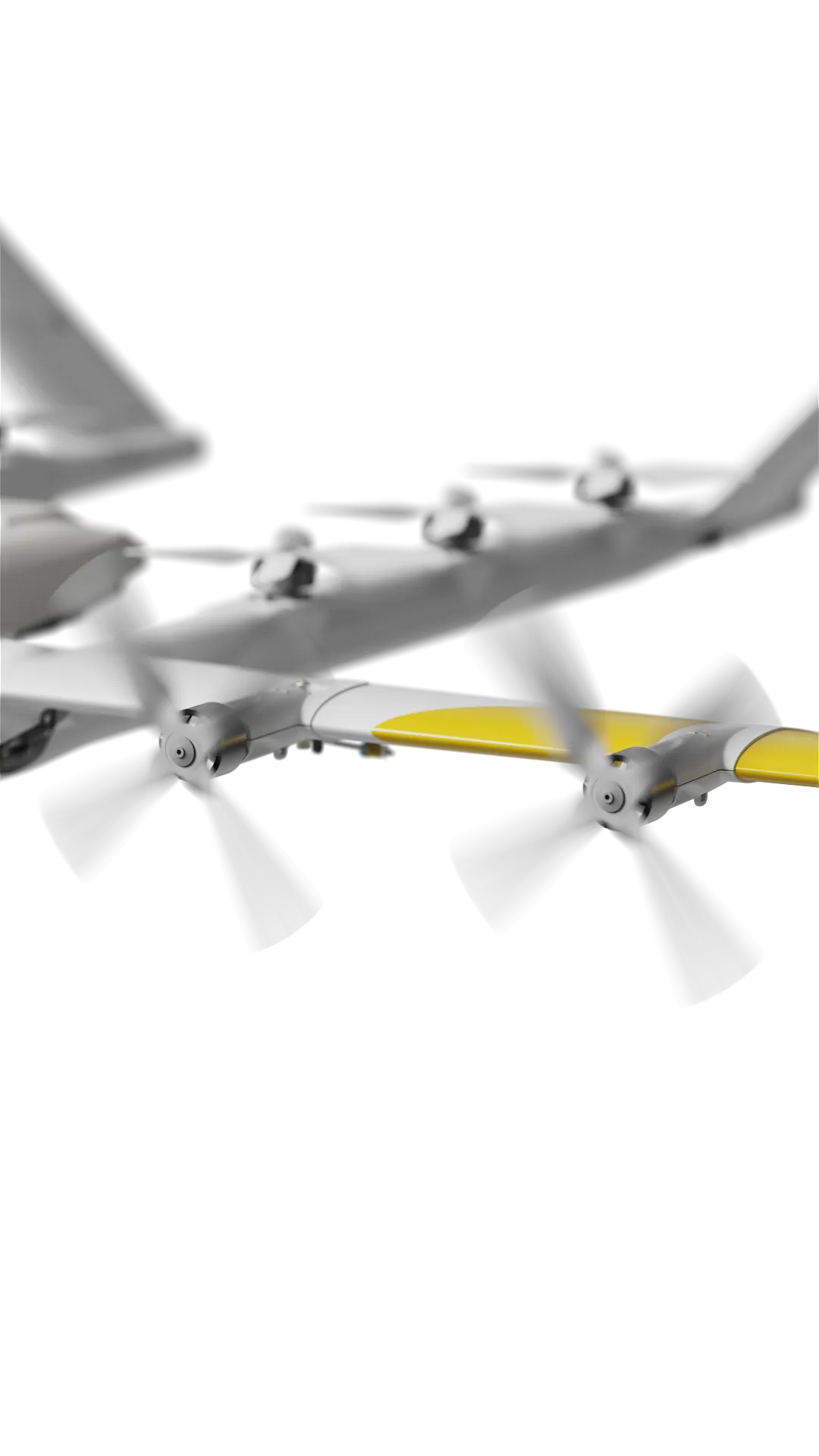
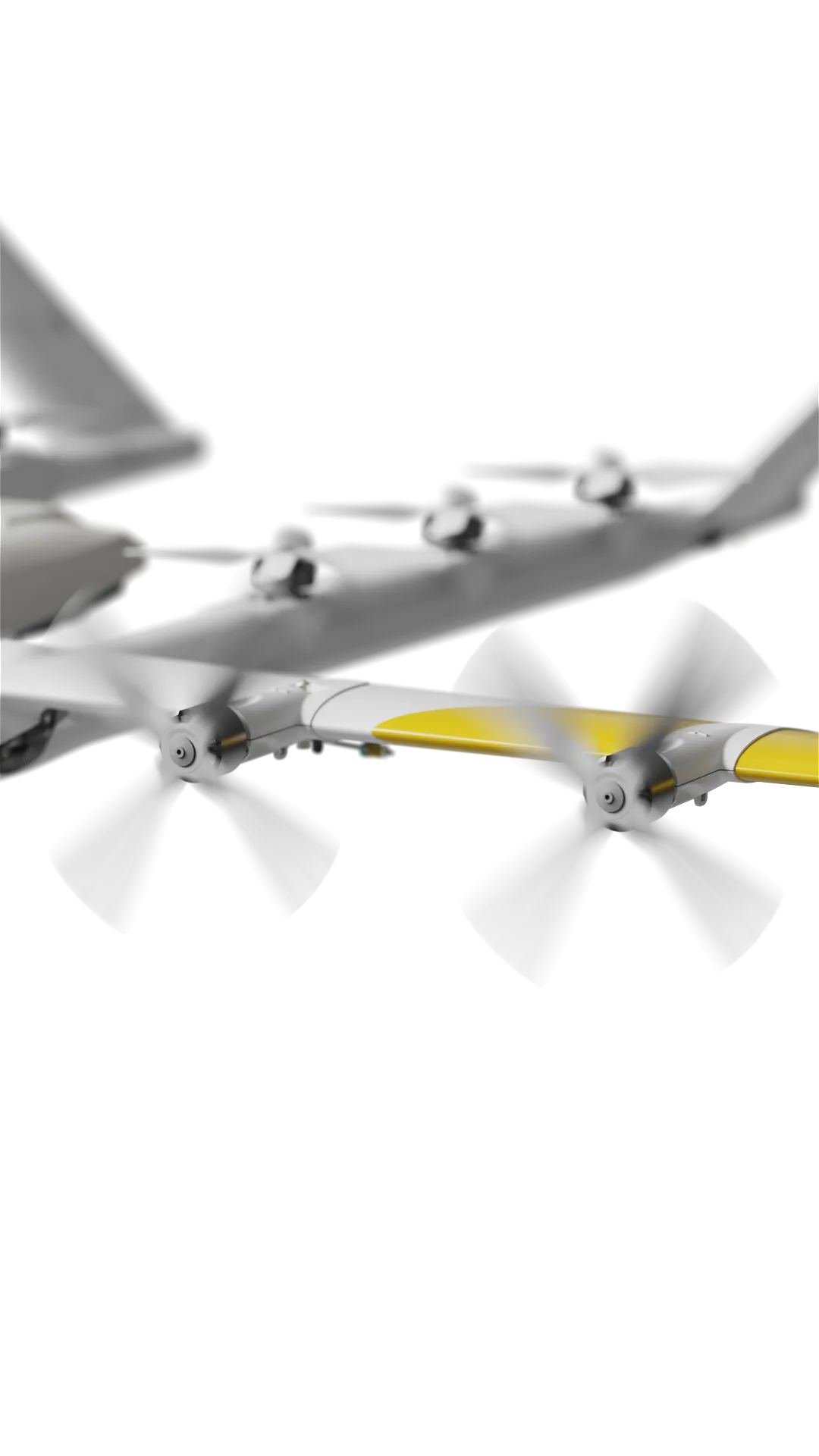
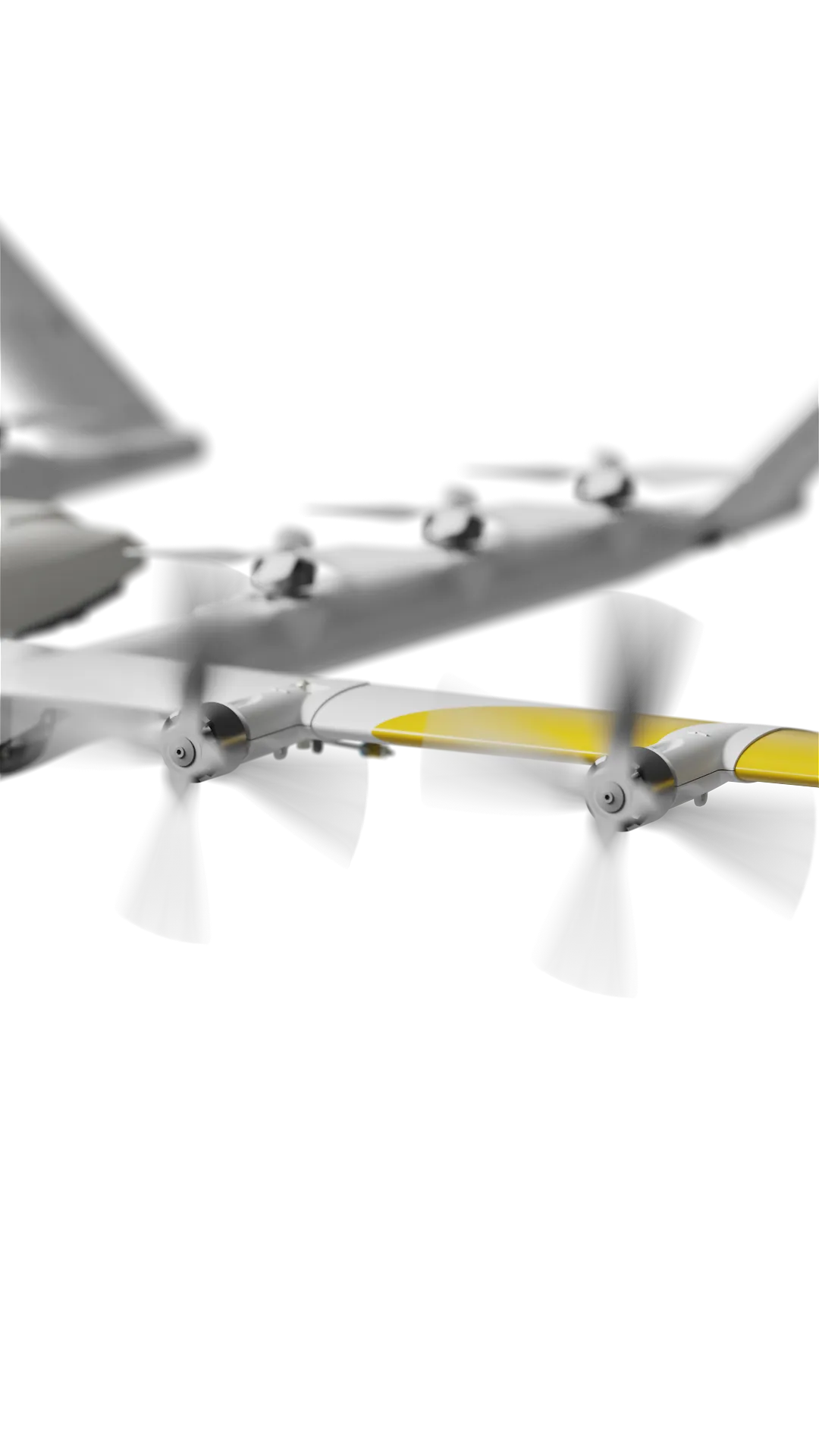
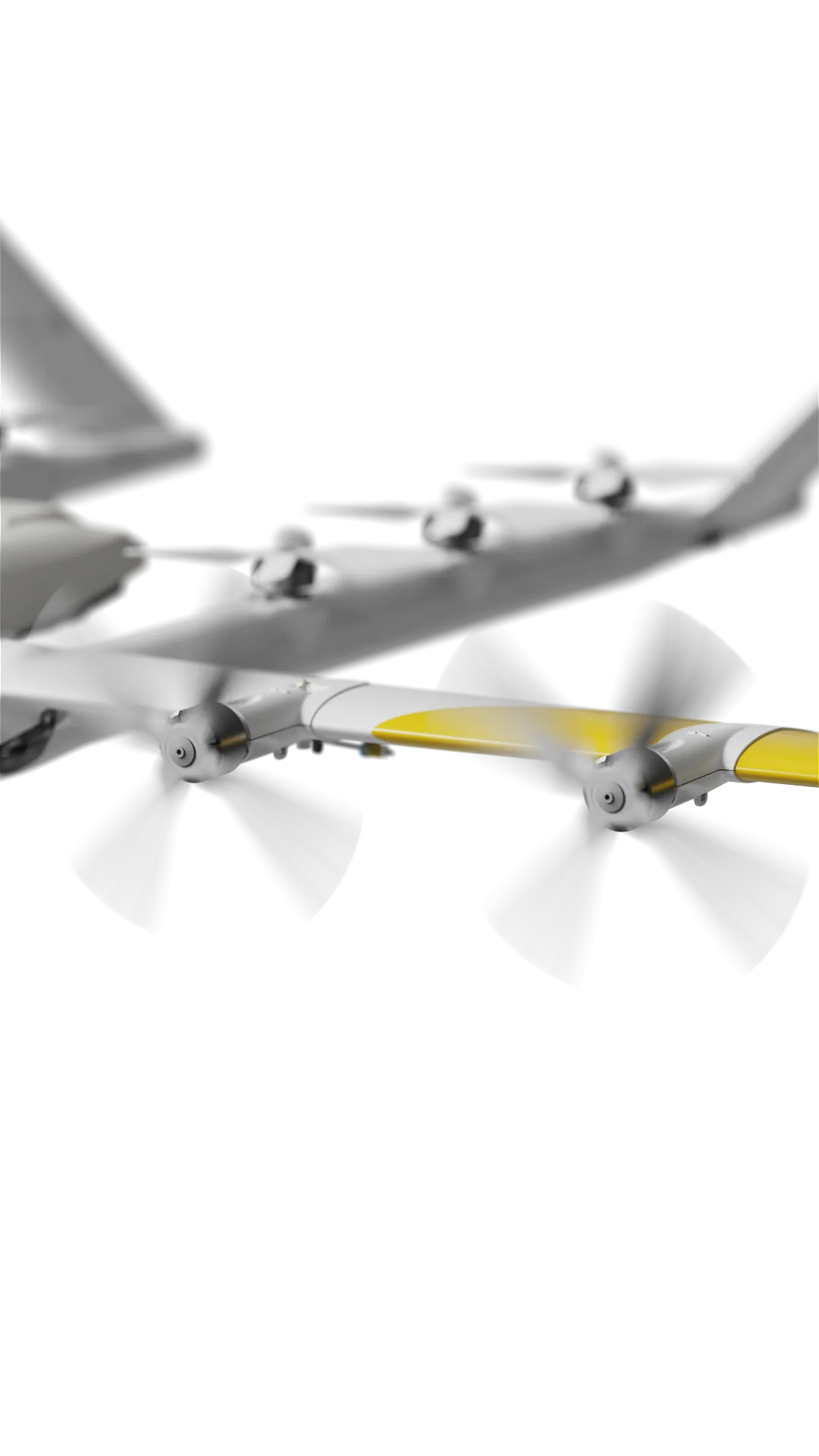
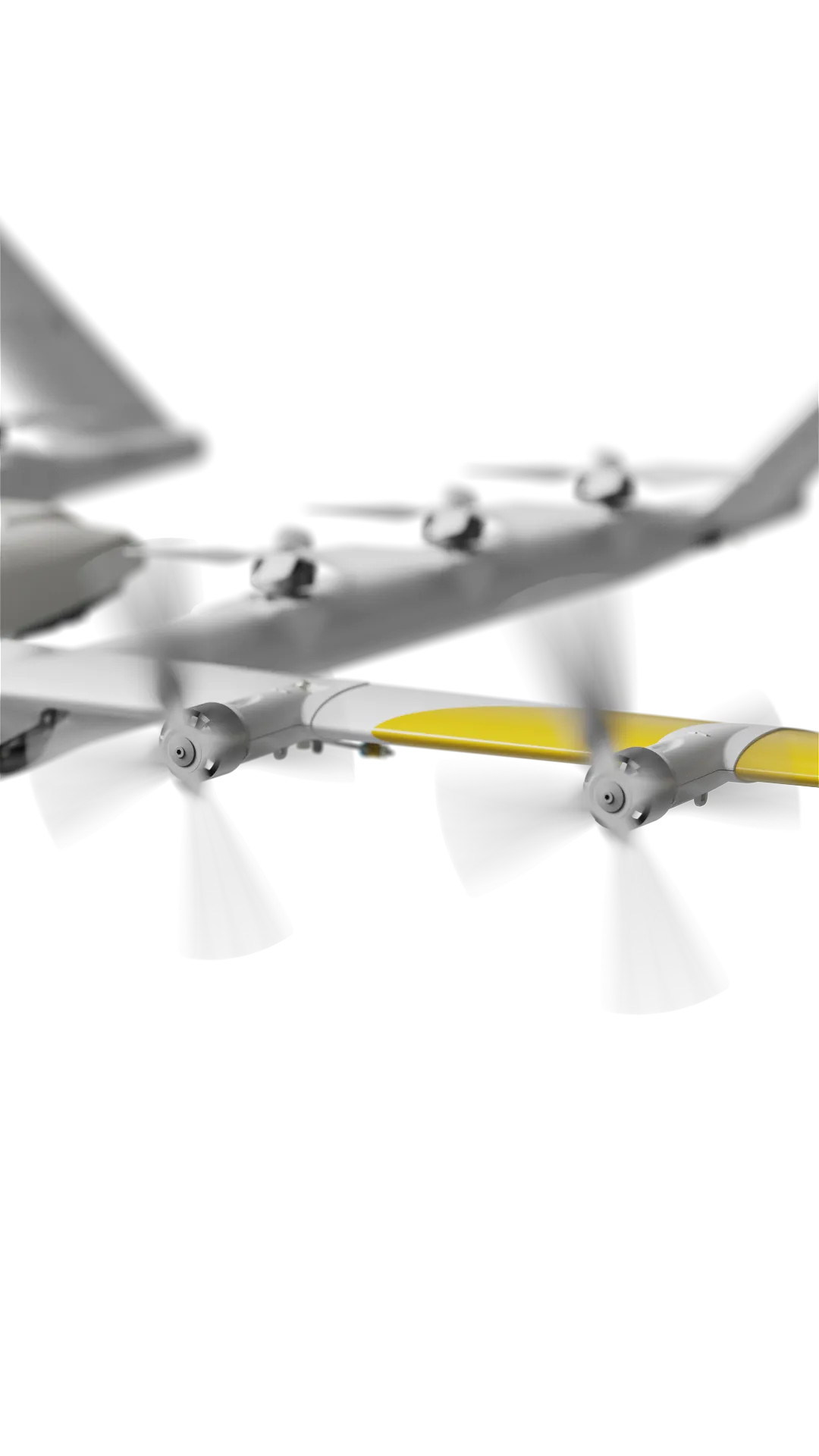
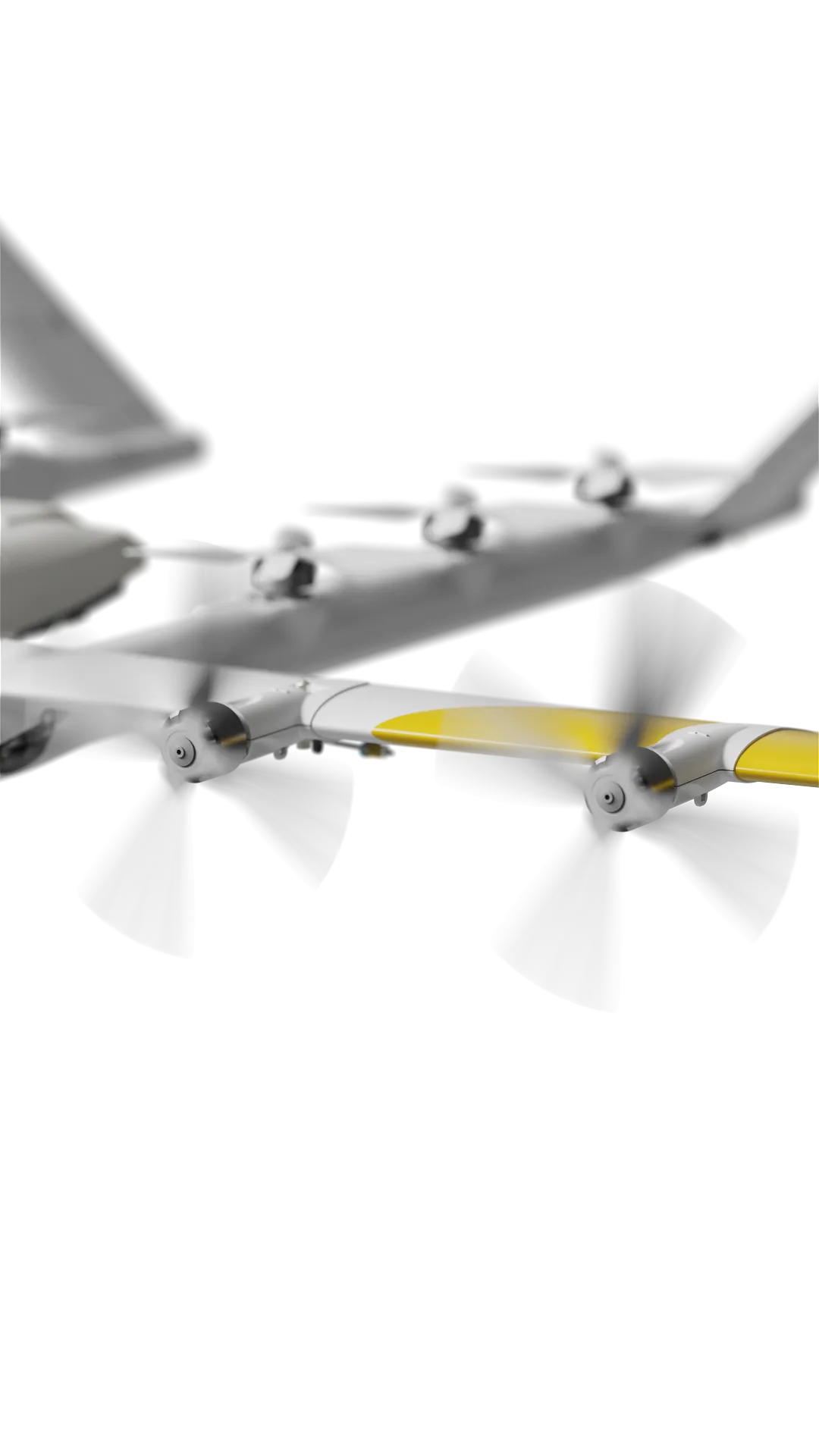
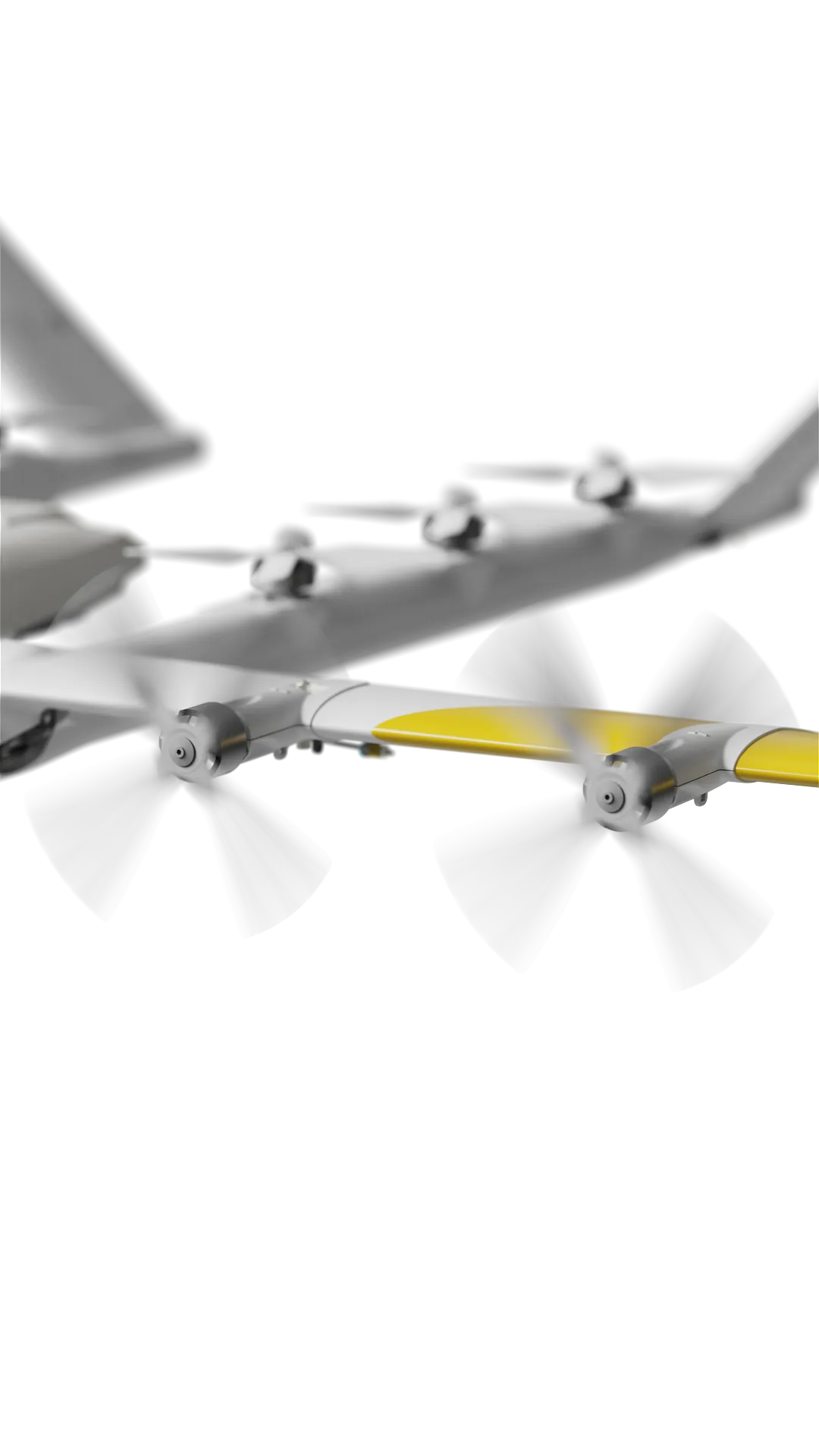
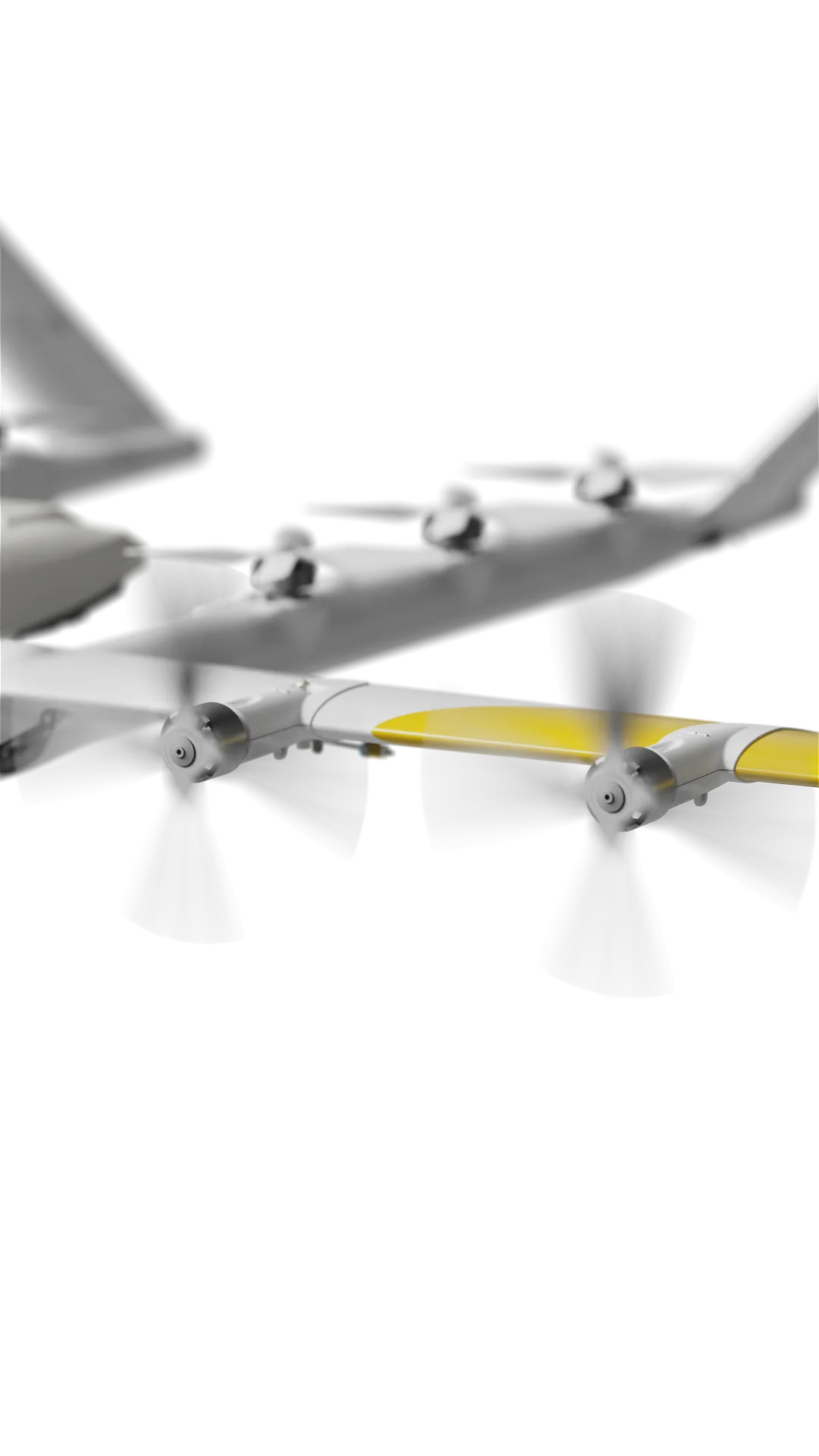
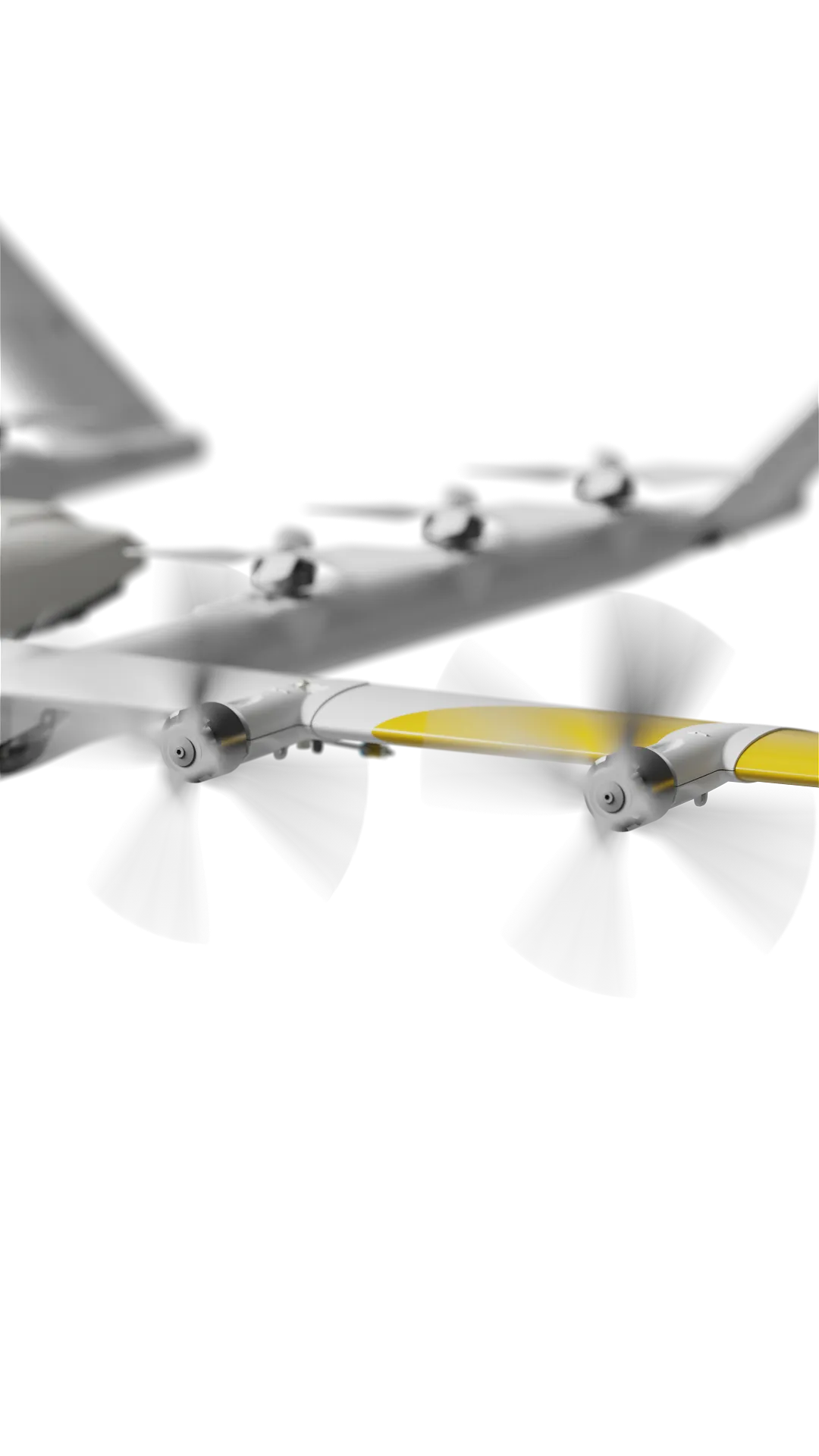
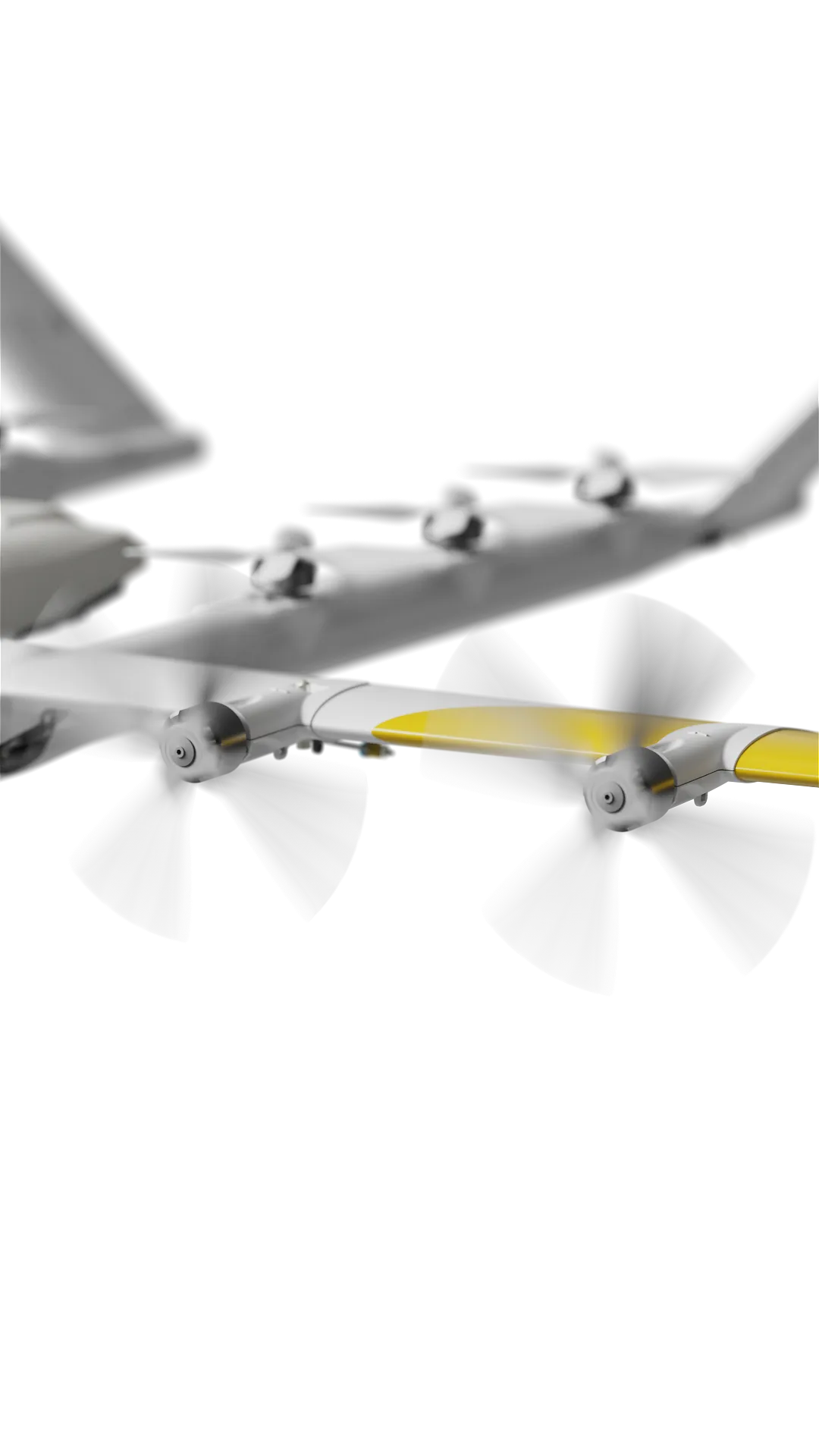
Our drones
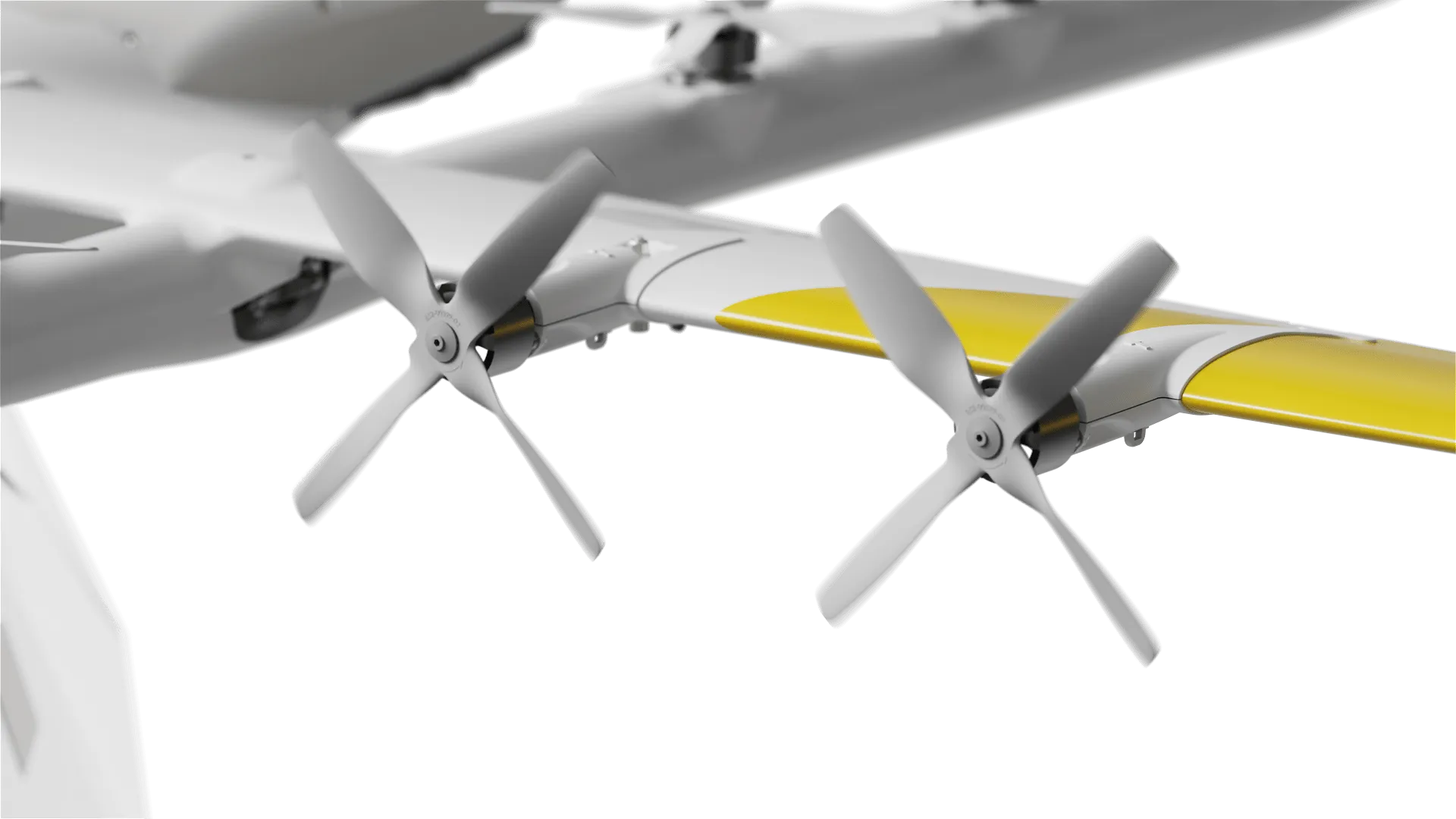
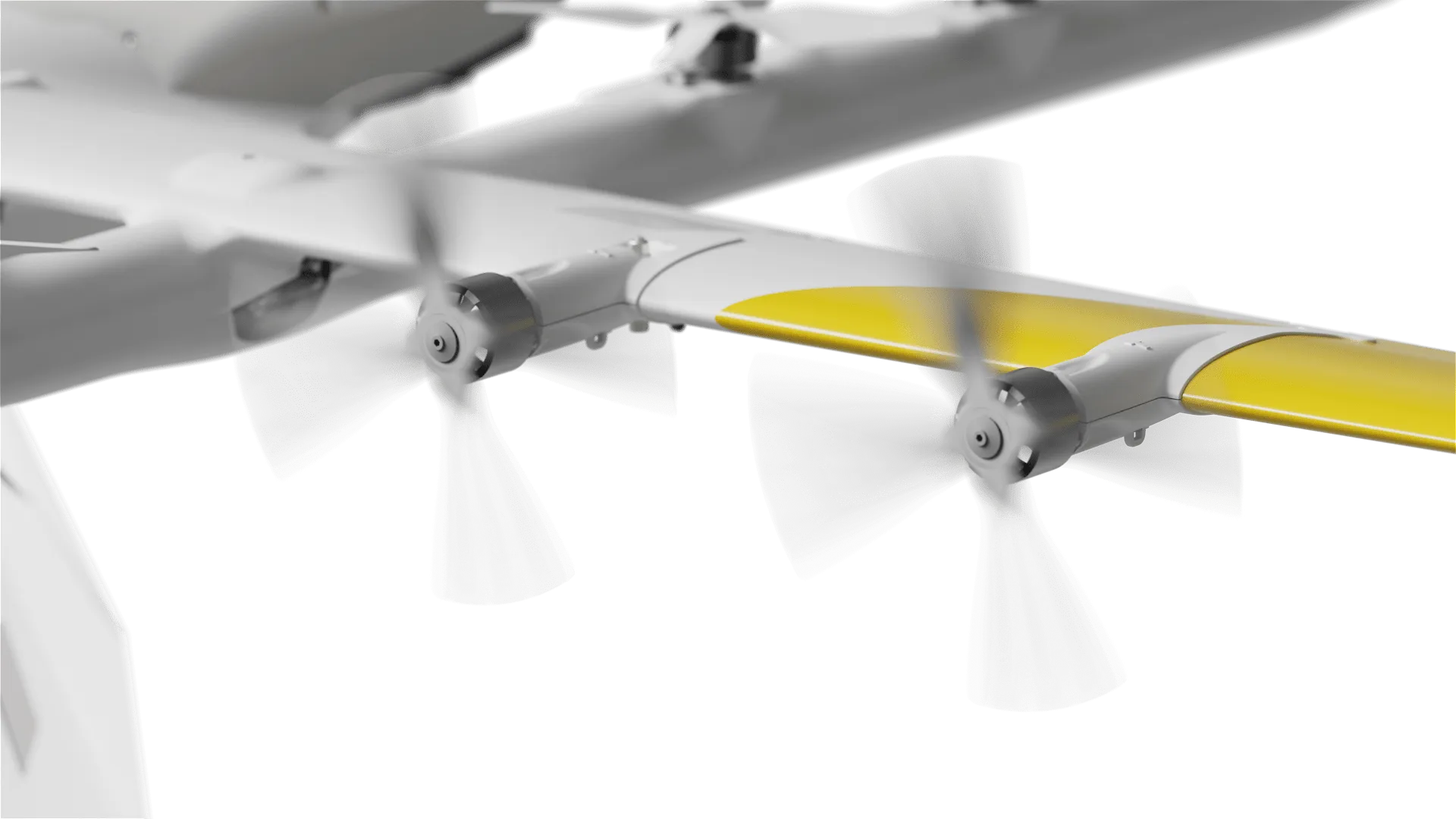
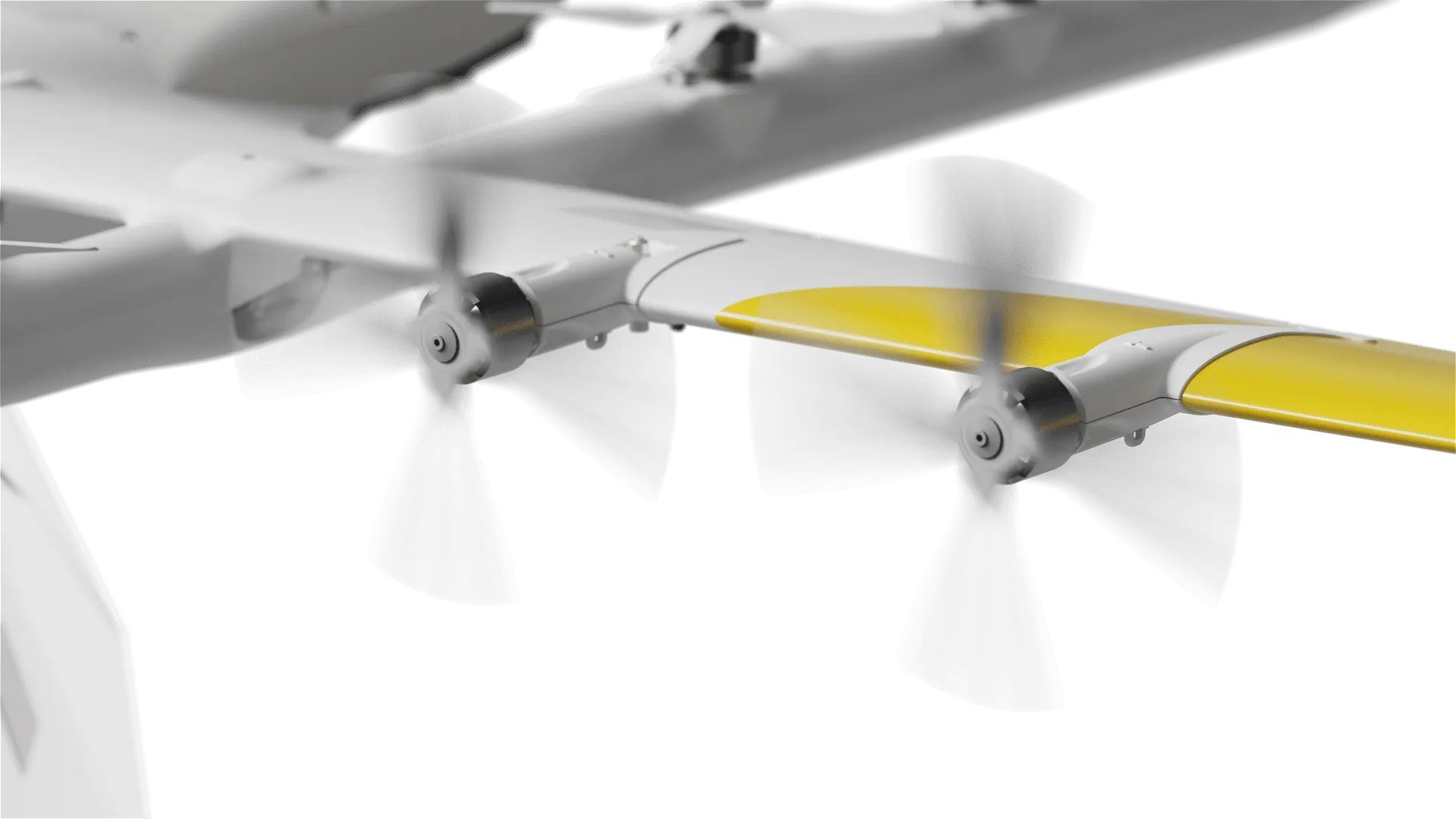
Wing's innovative design uses a unique dual-propulsion system. Vertical lift motors enable precision takeoff, delivery, and landing. Separate cruise motors optimize efficiency for long-range delivery.
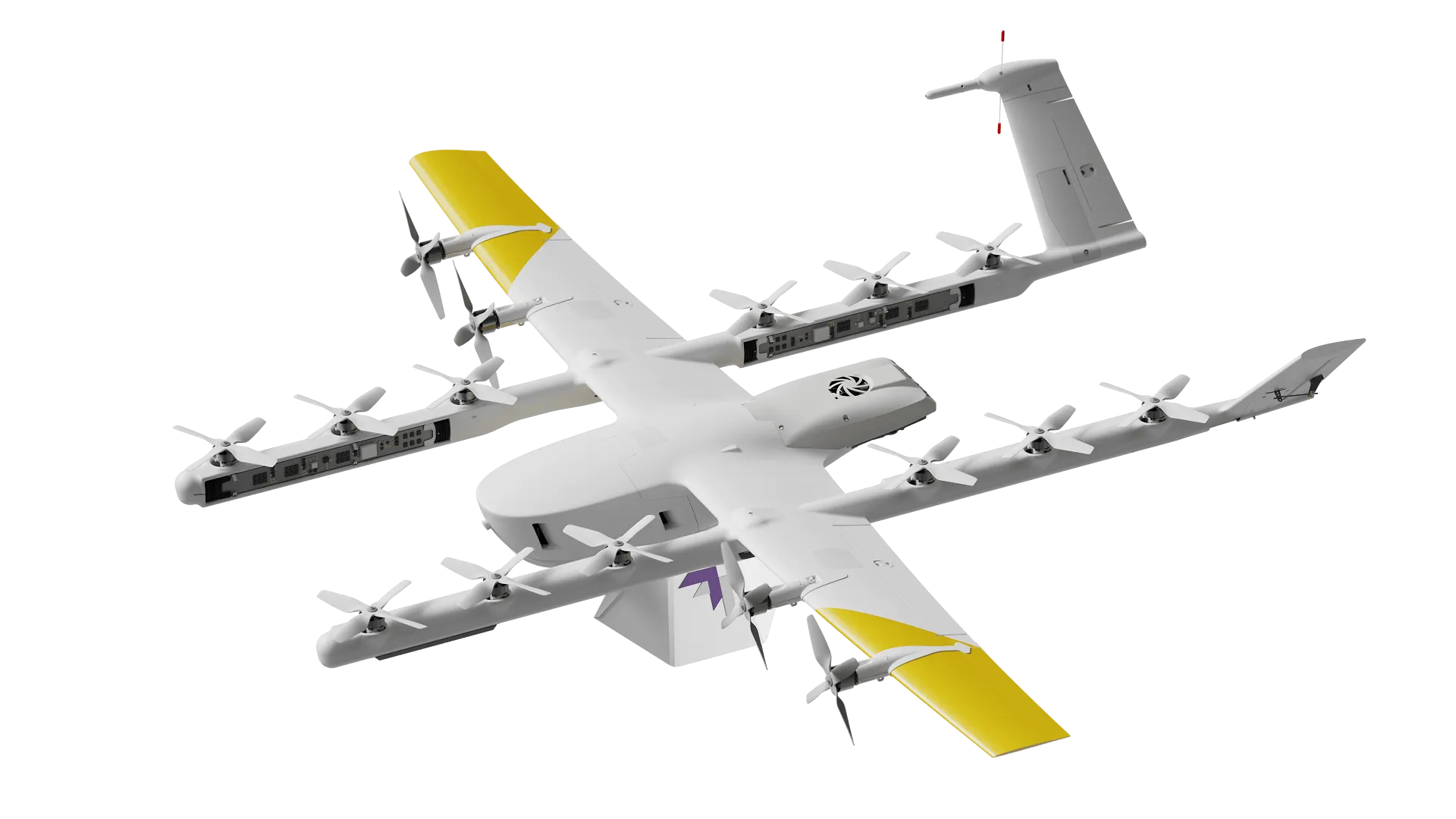
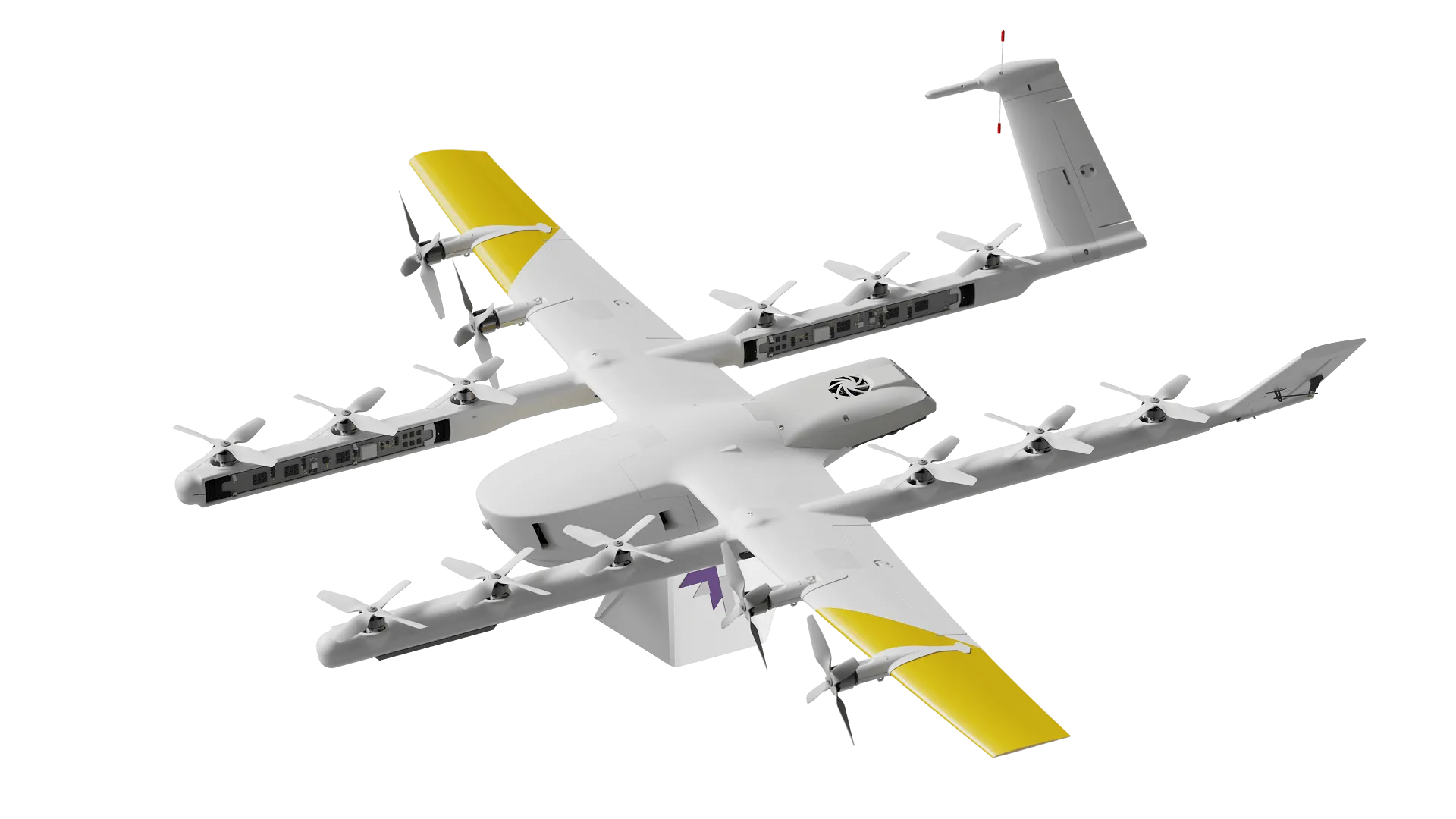
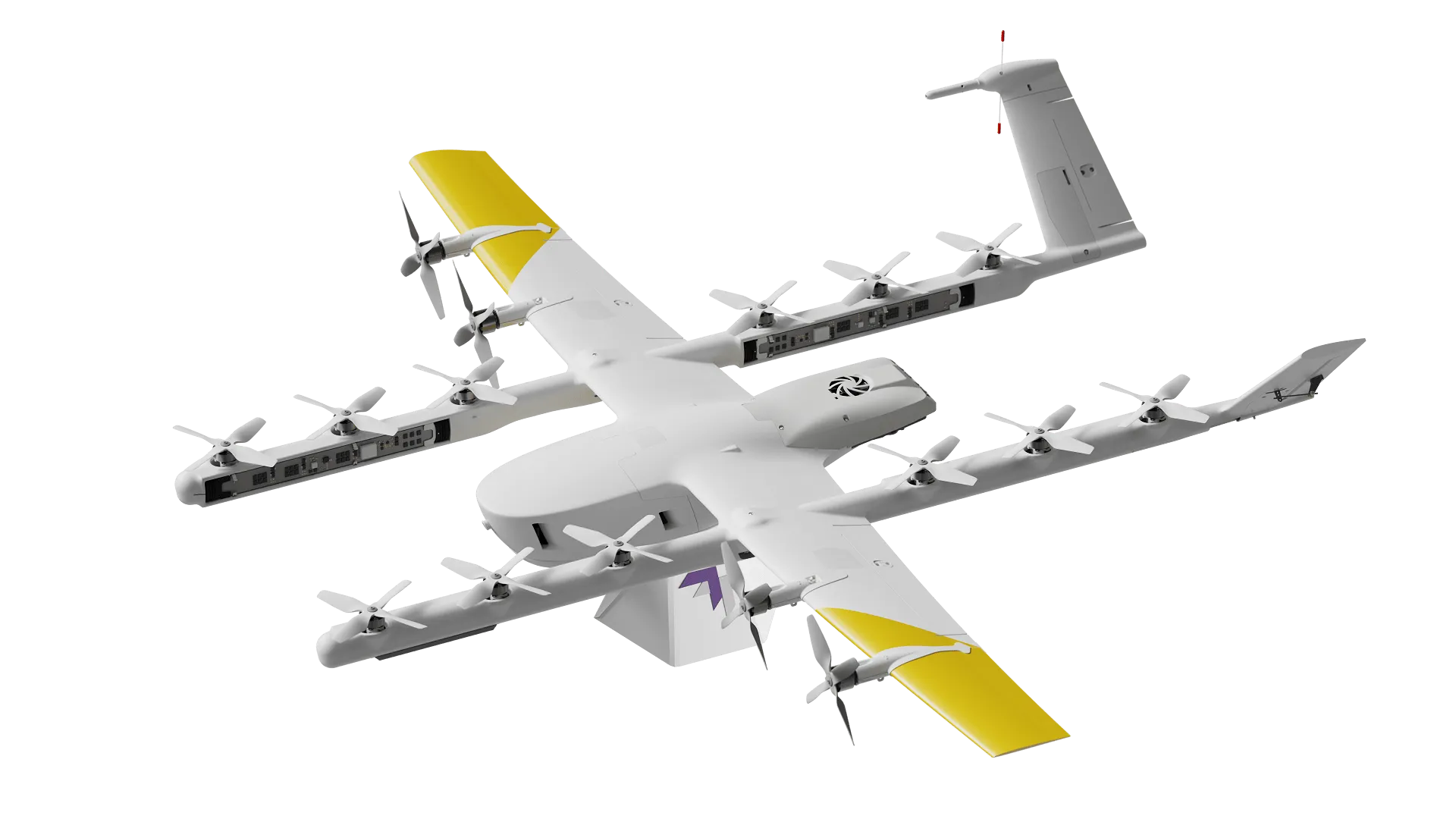
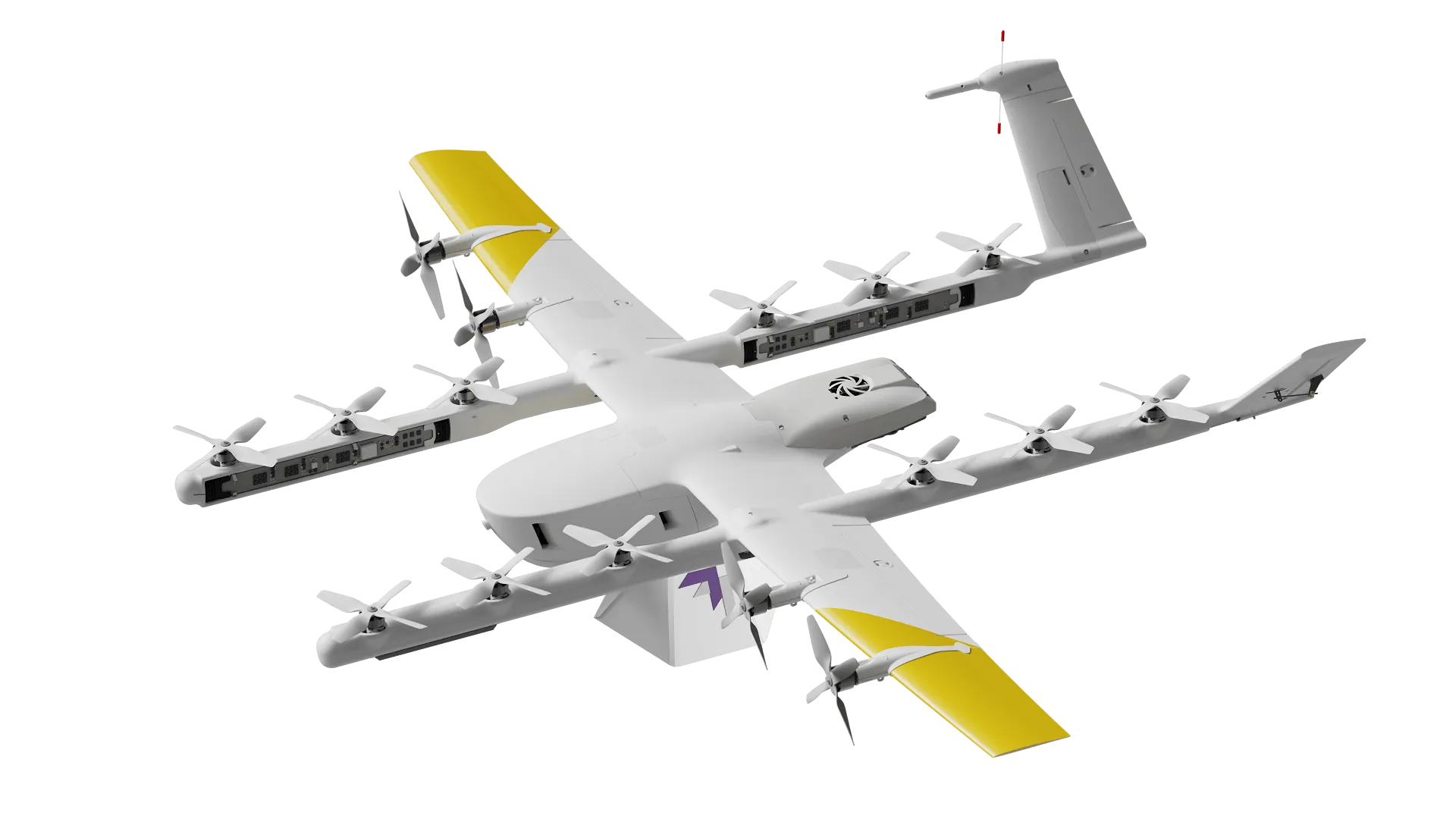
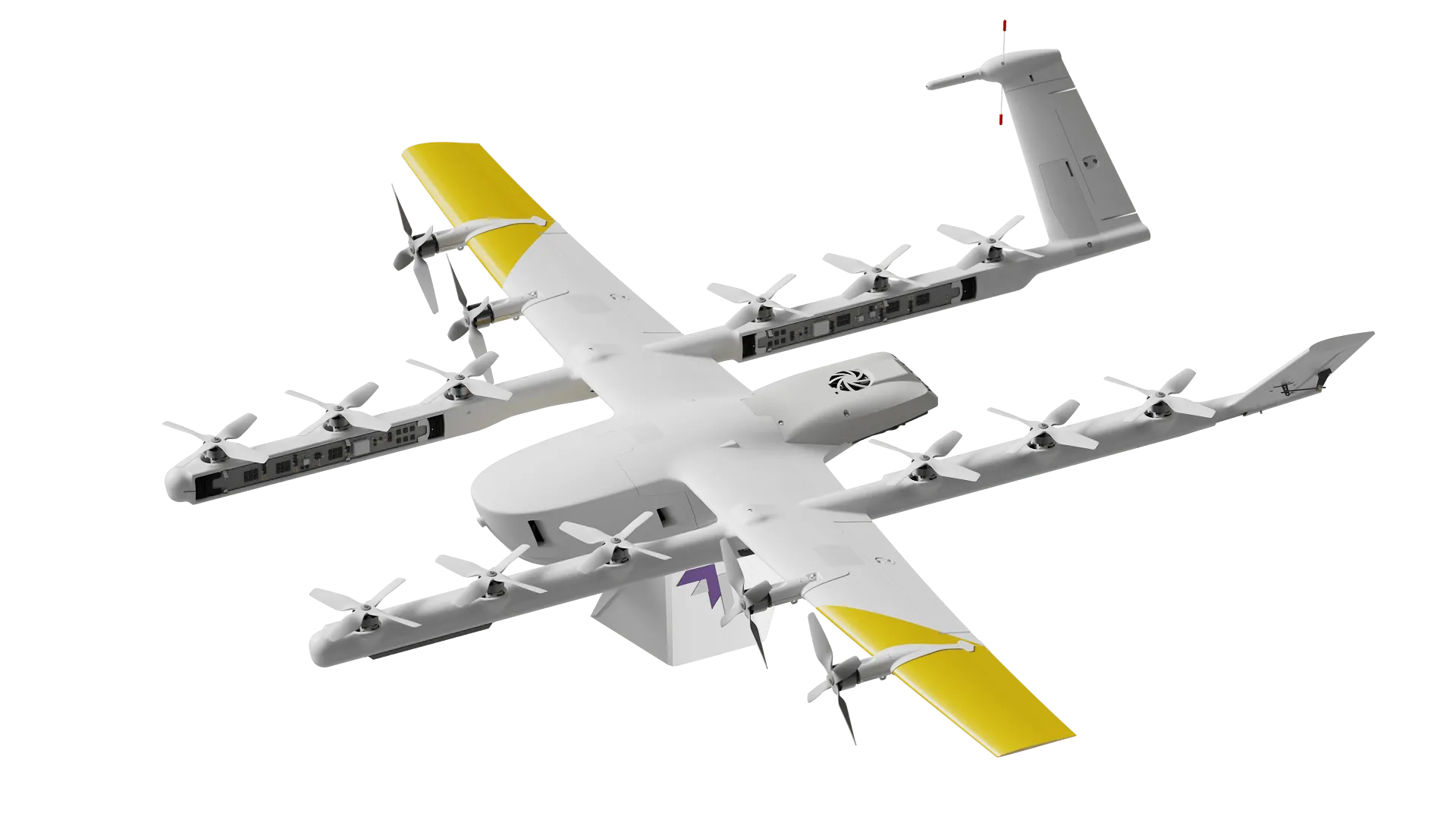
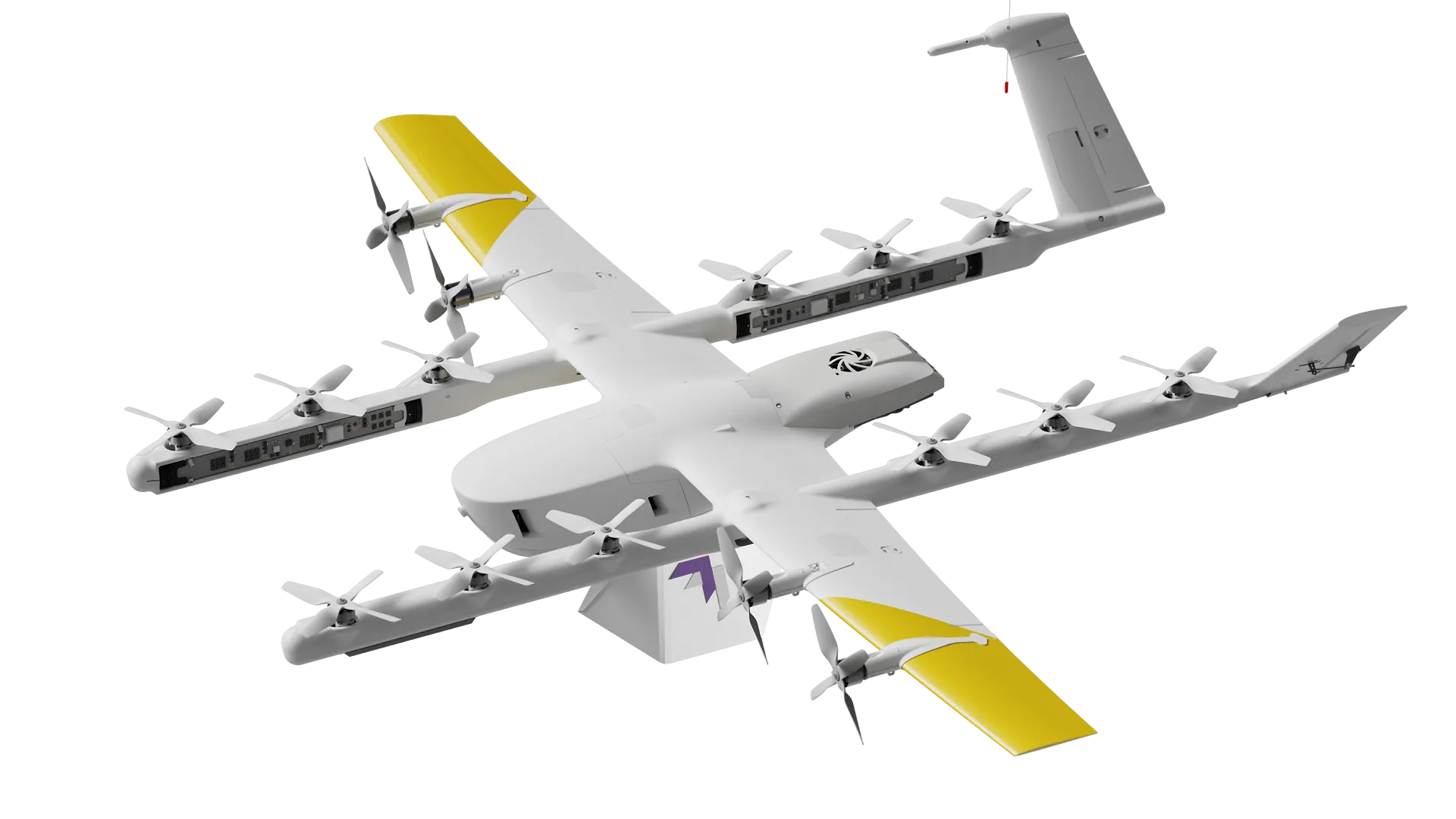
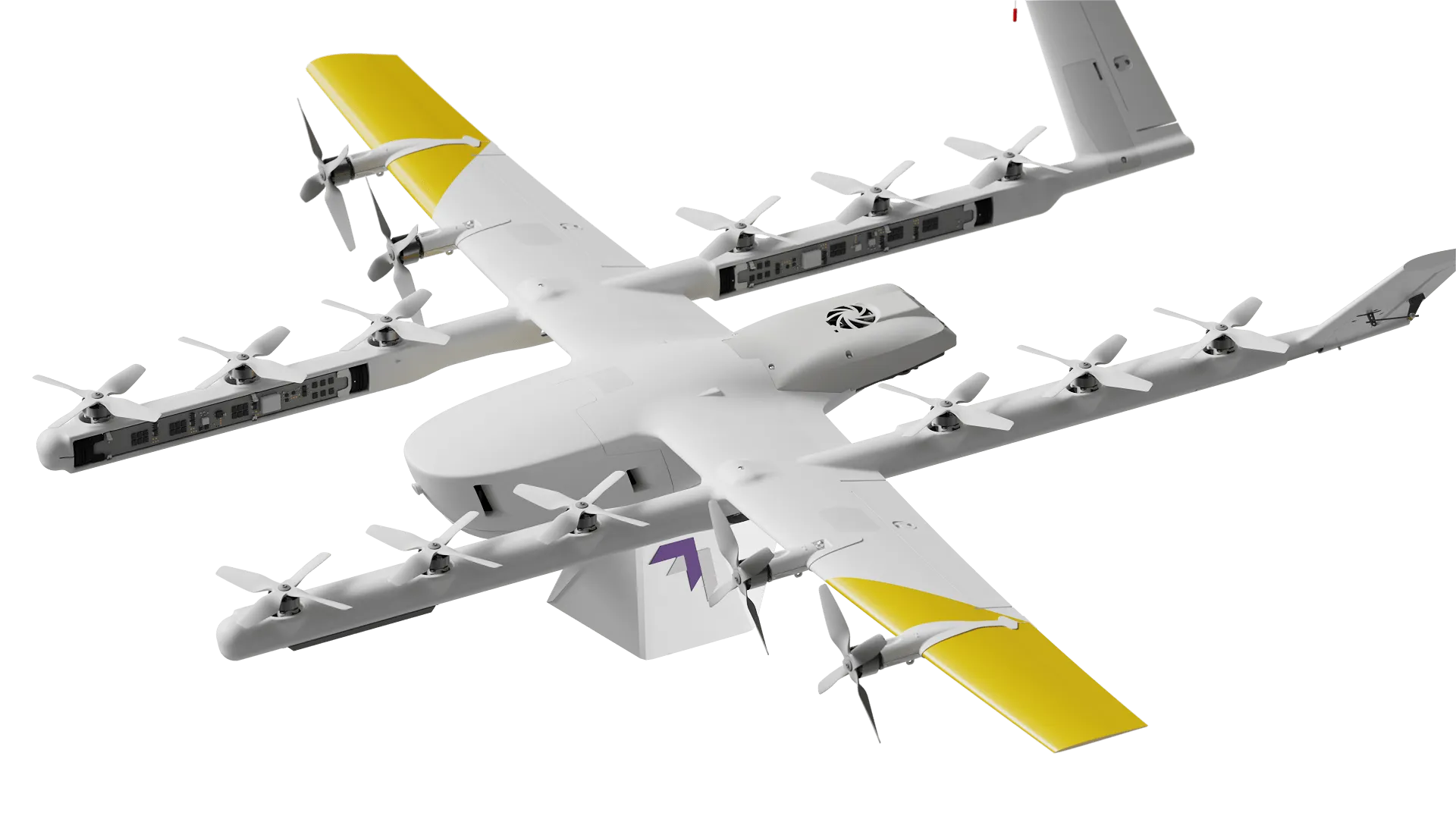
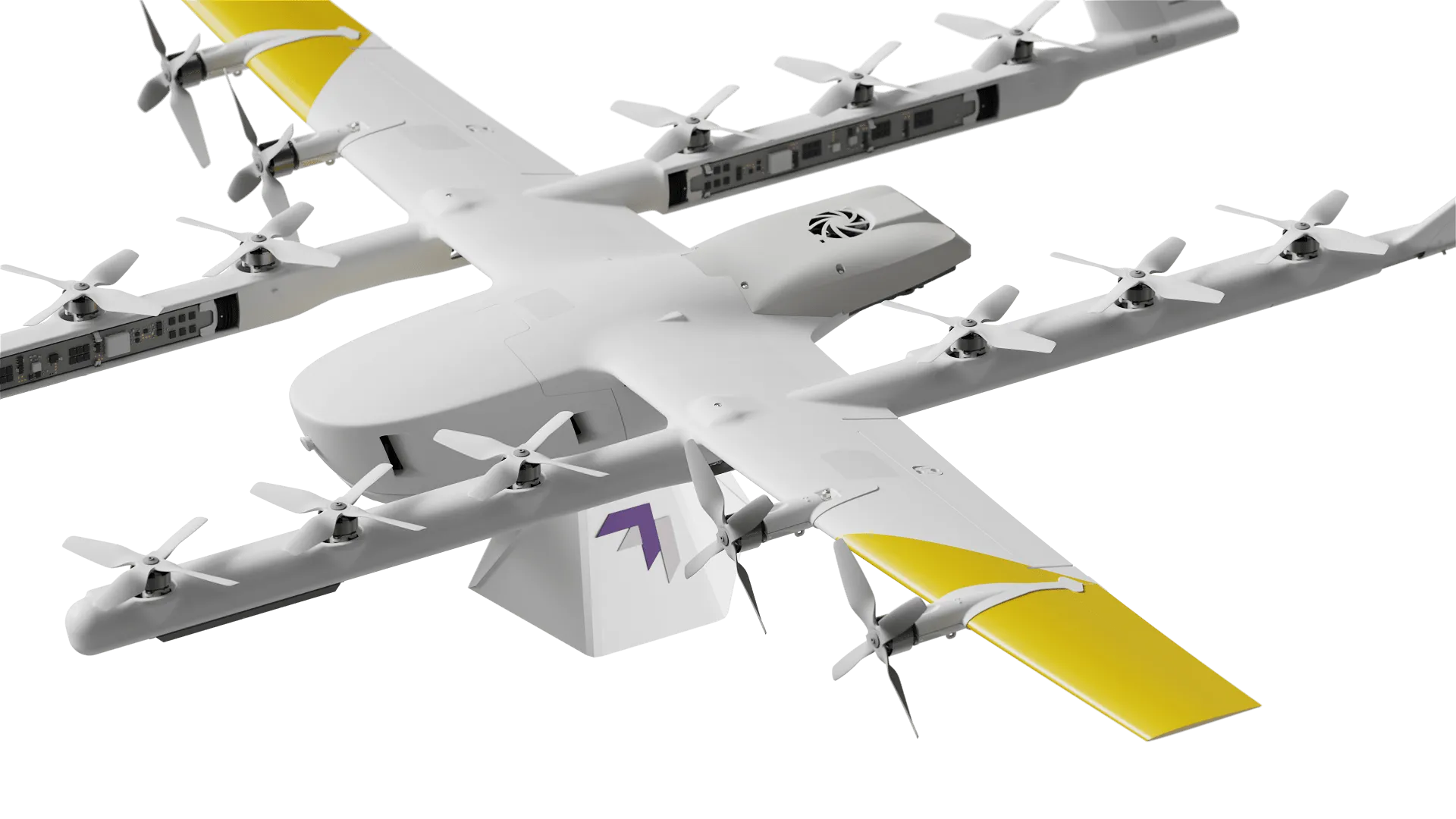
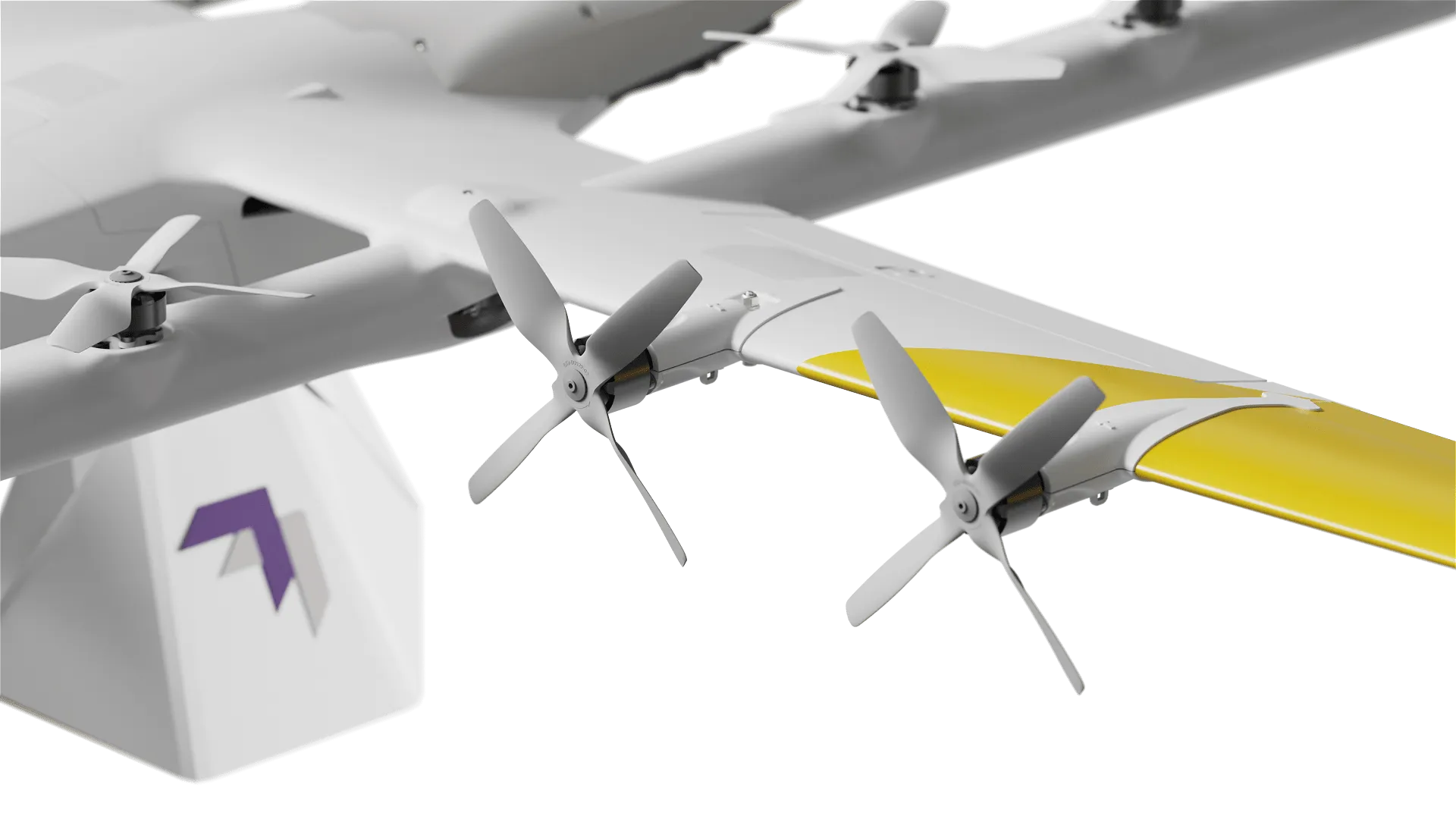
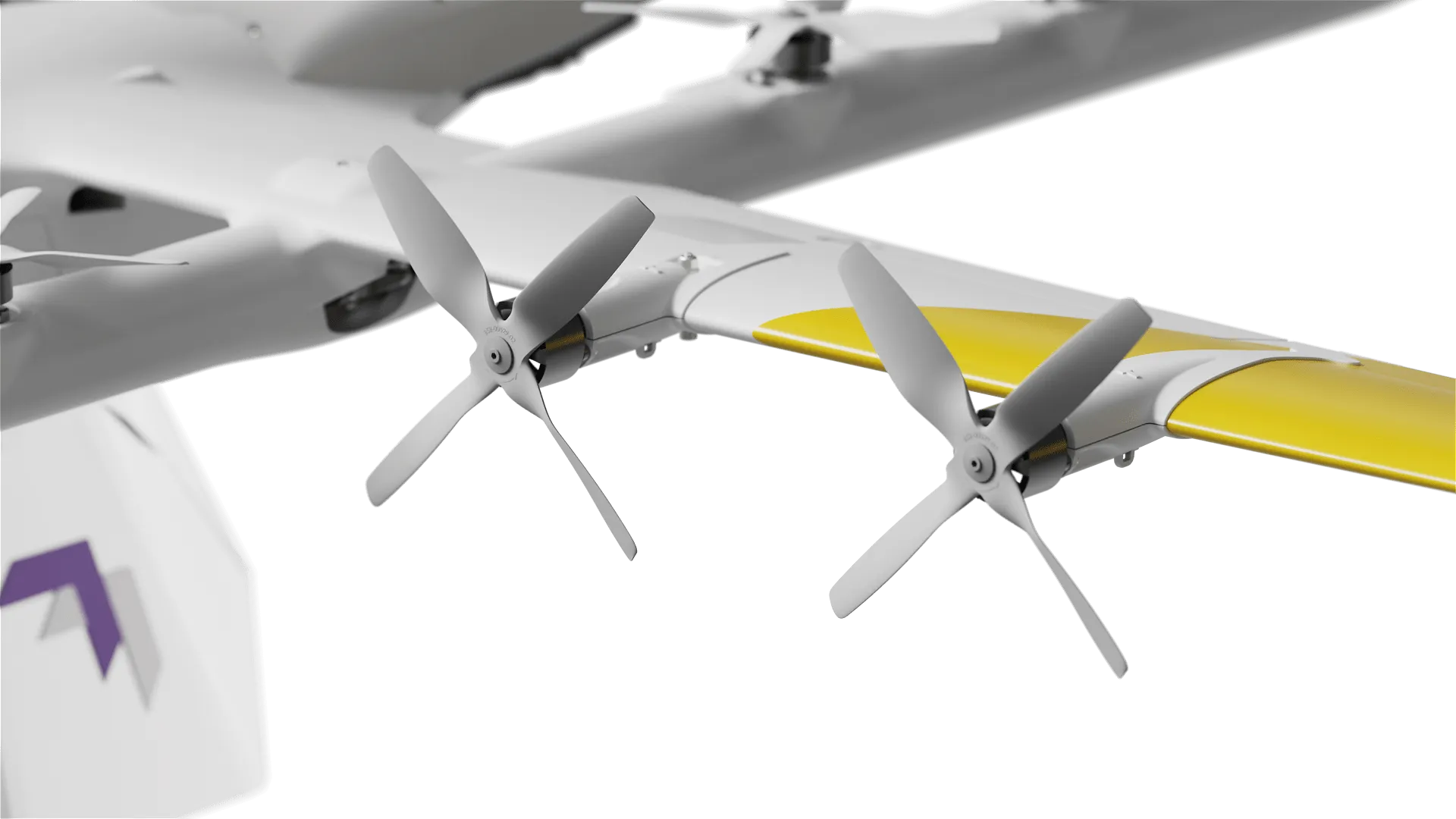
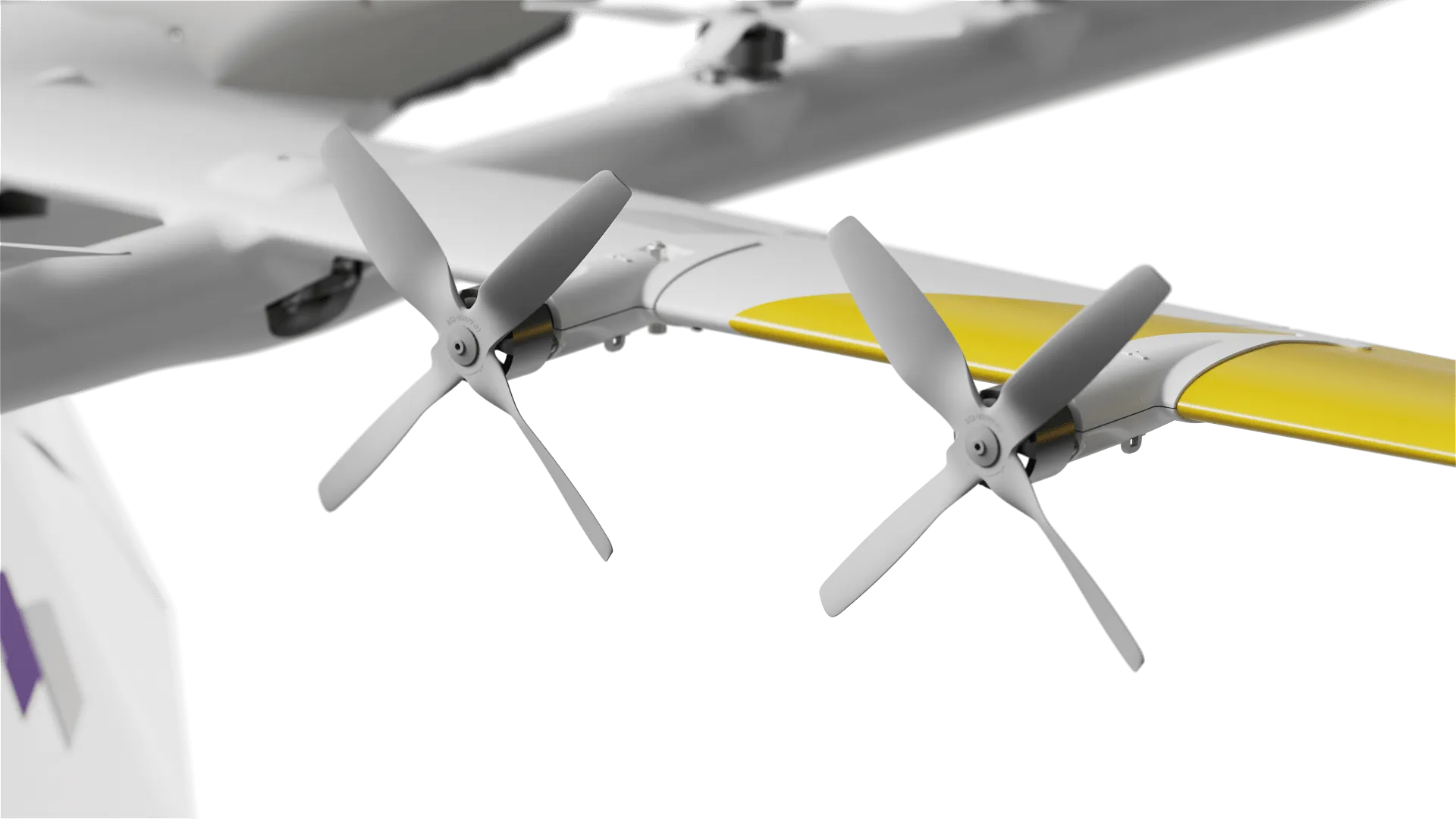
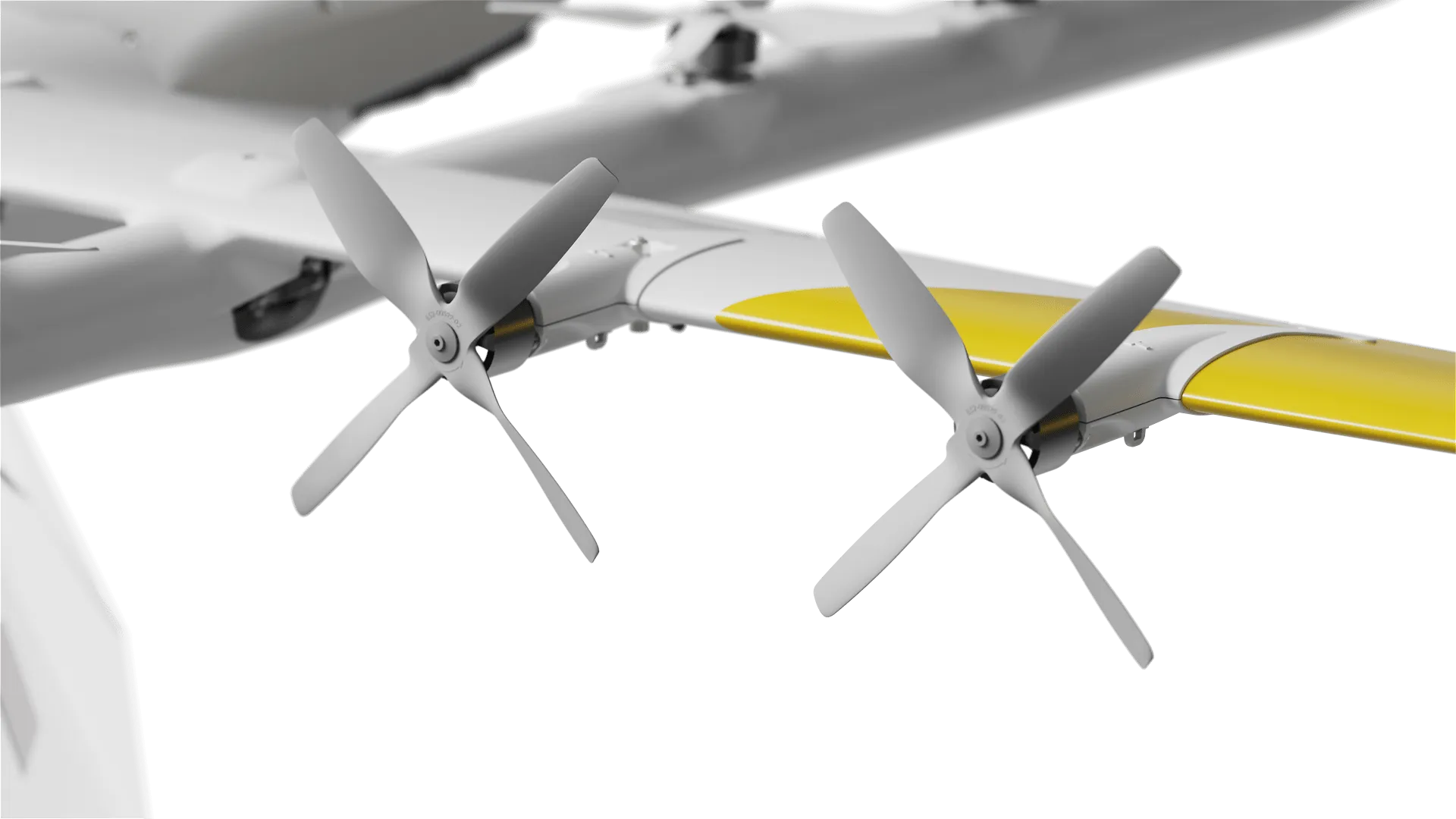
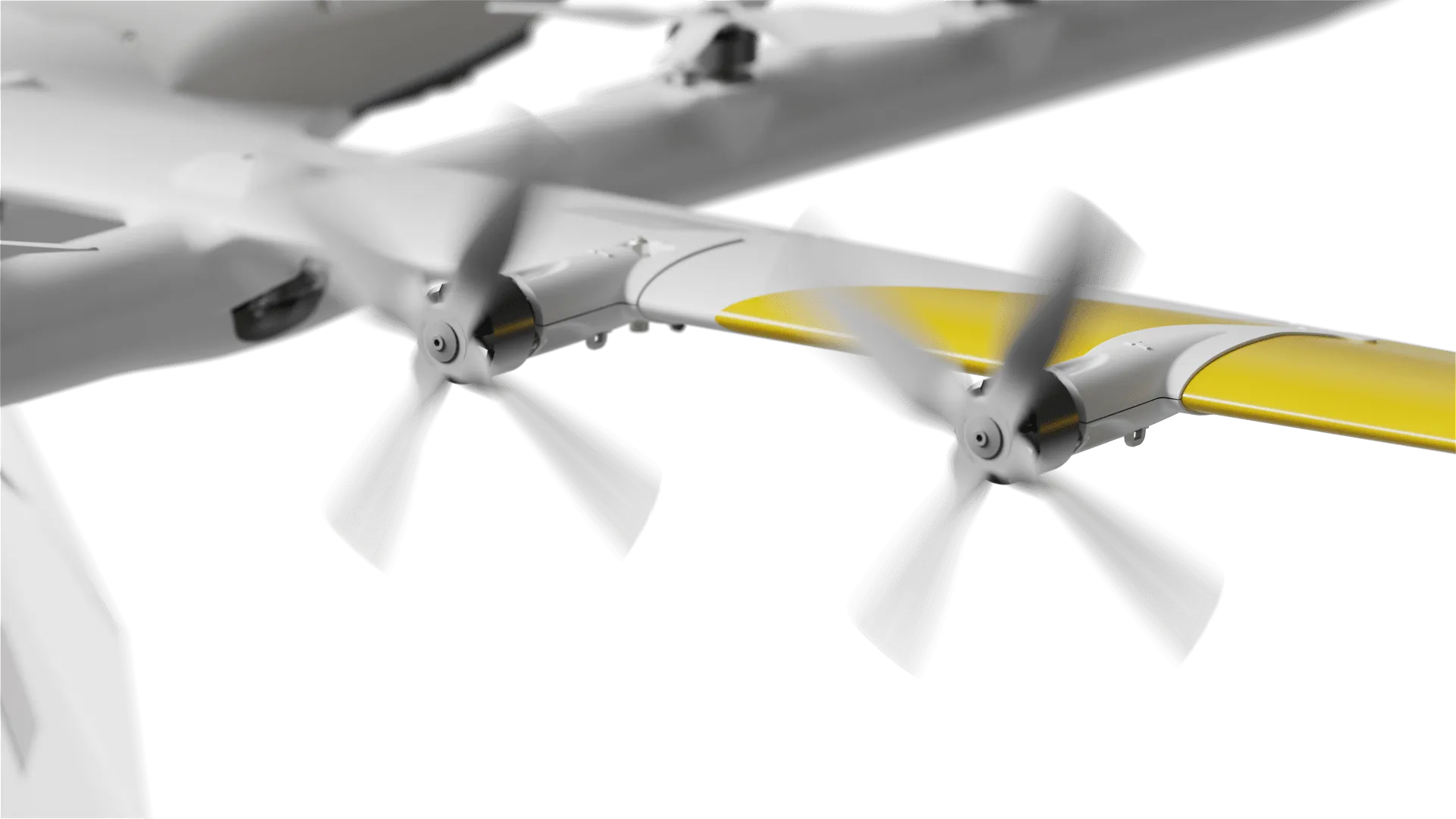
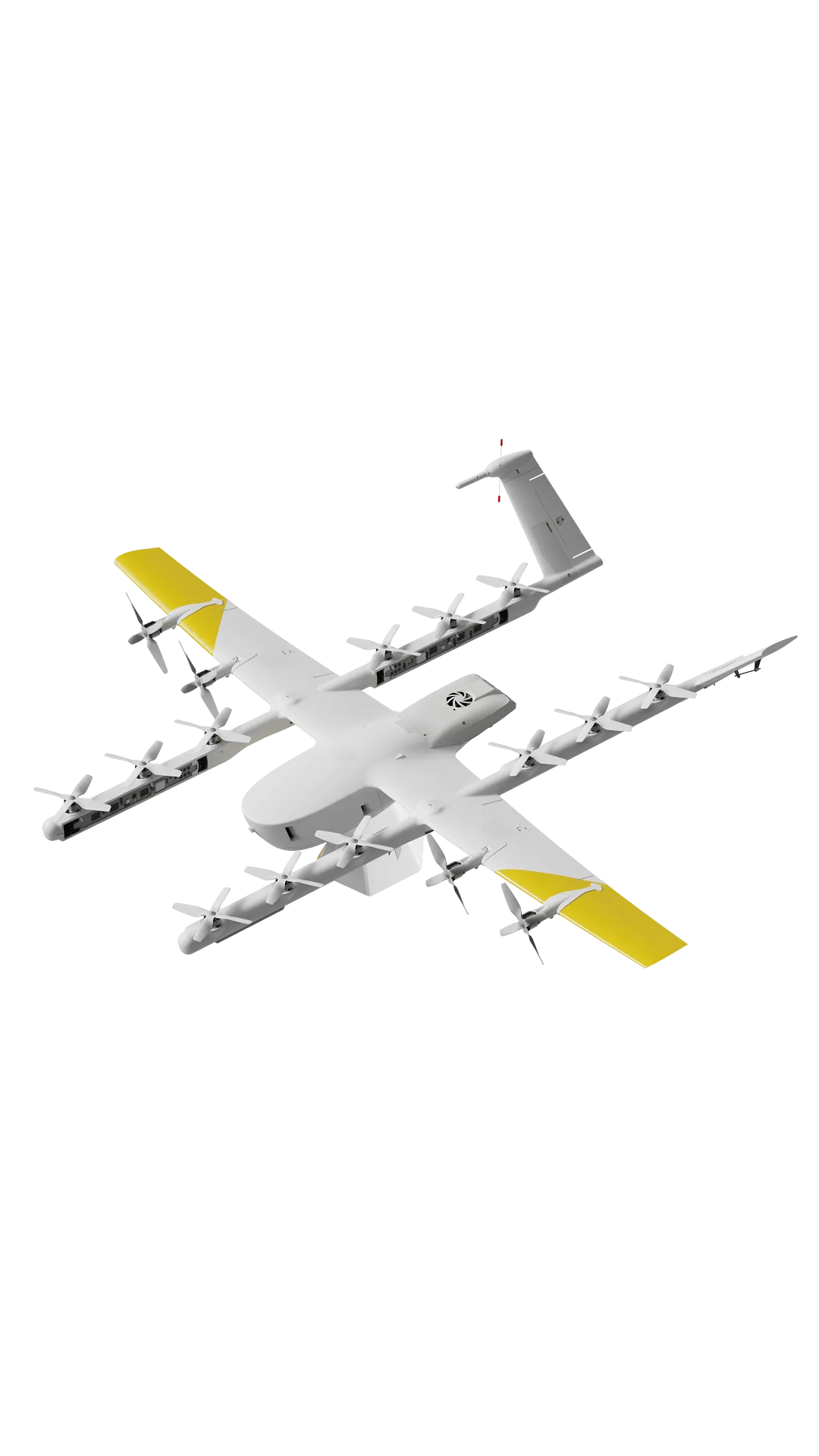
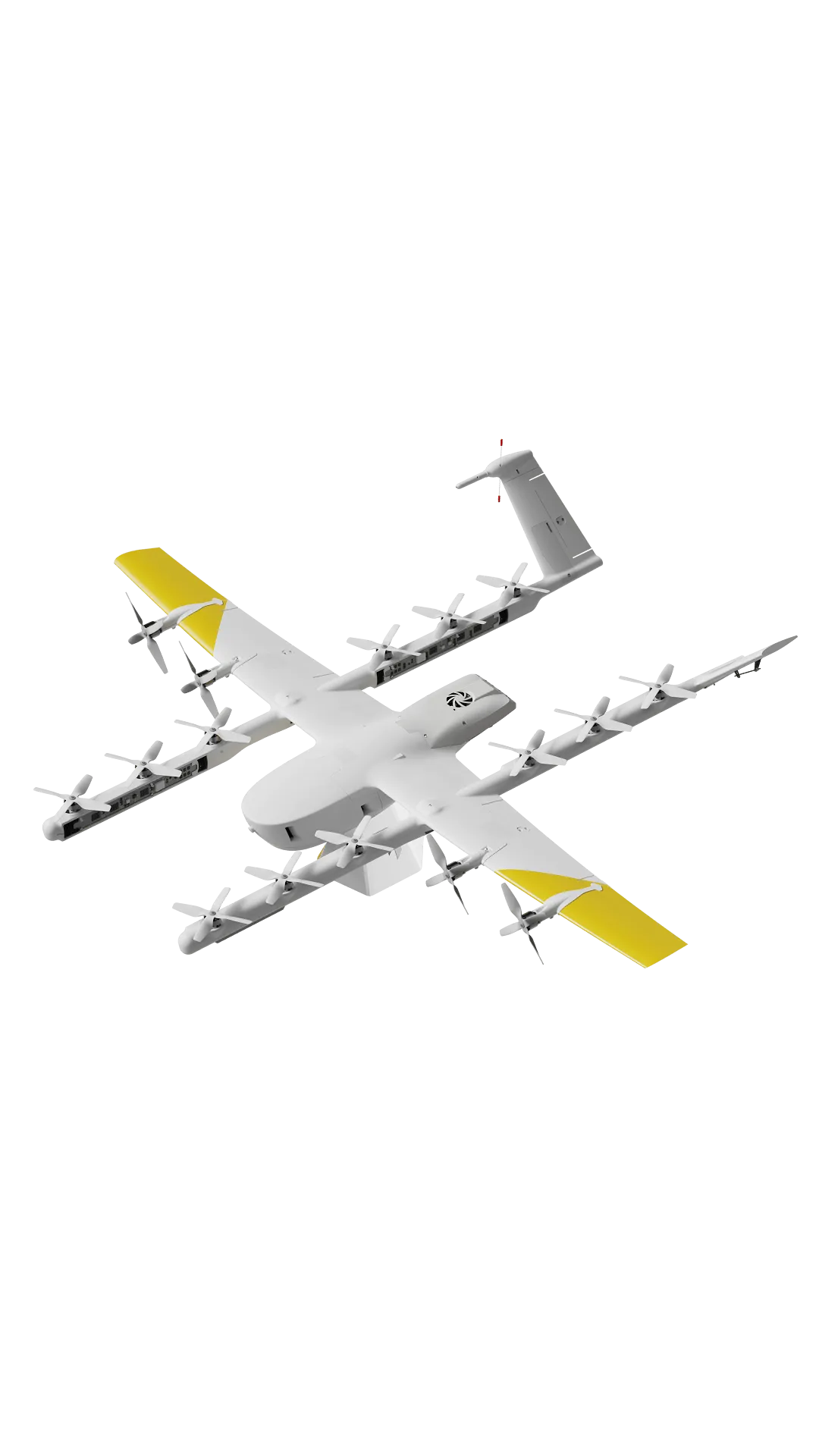
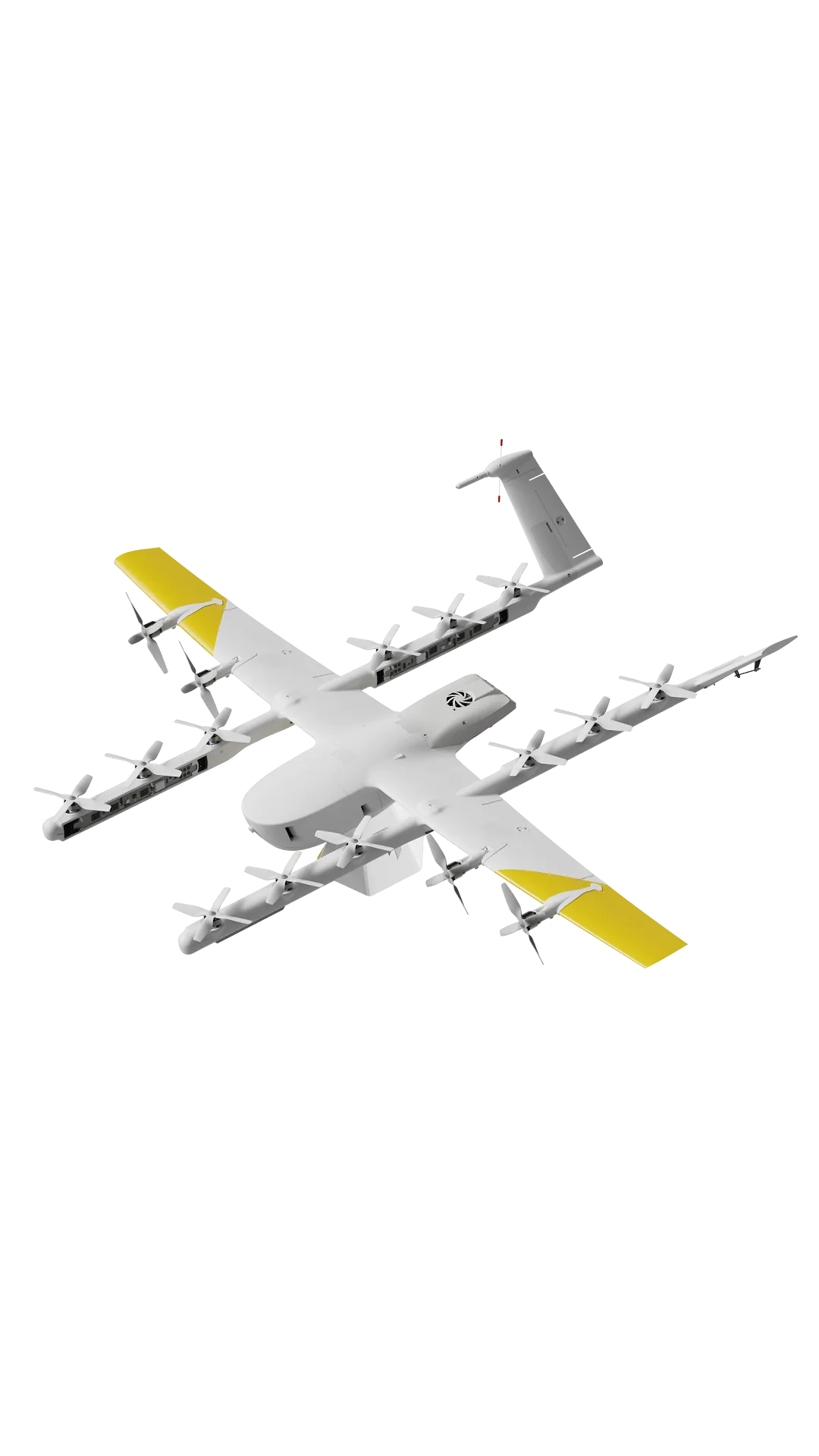
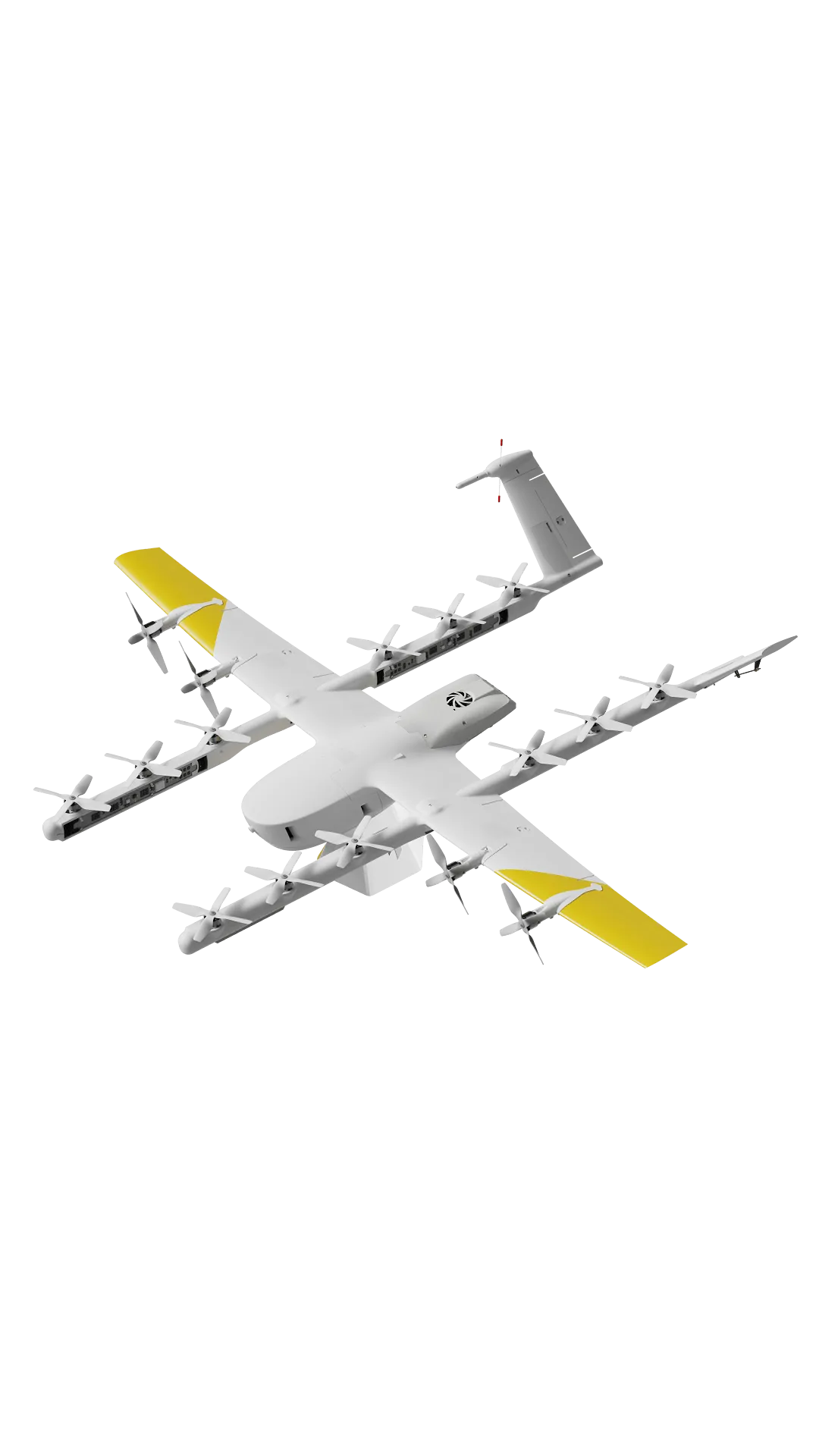
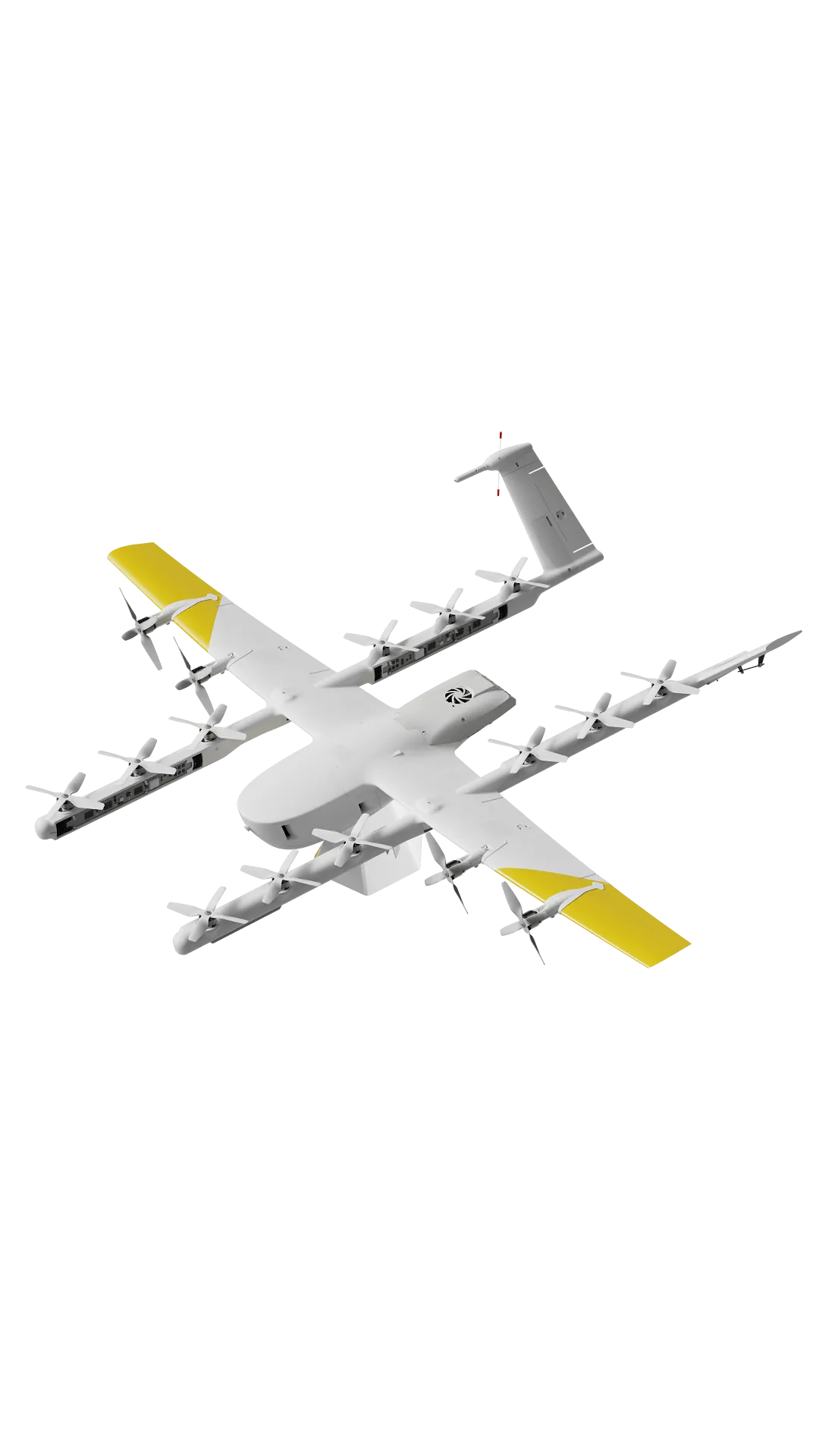
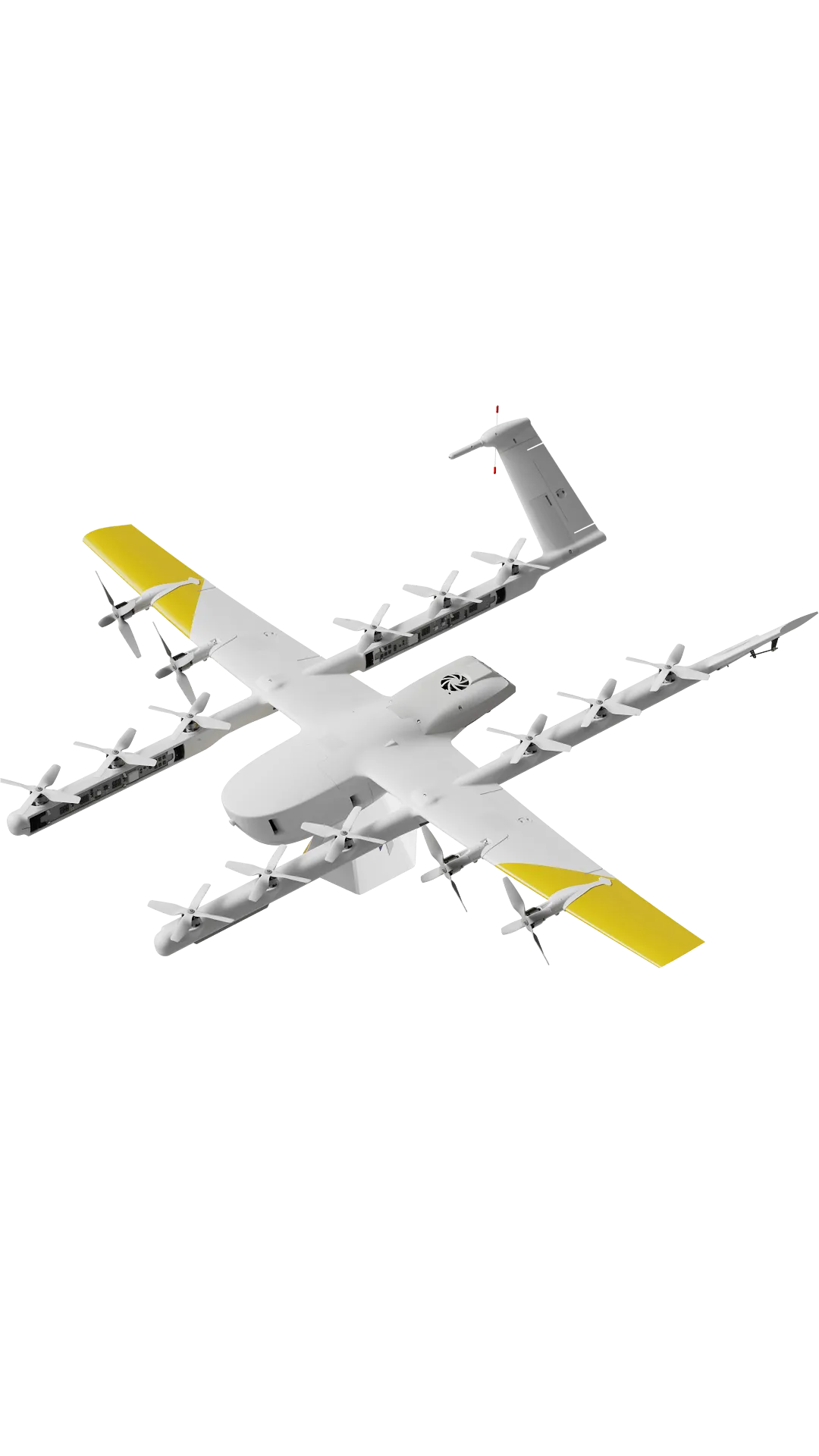
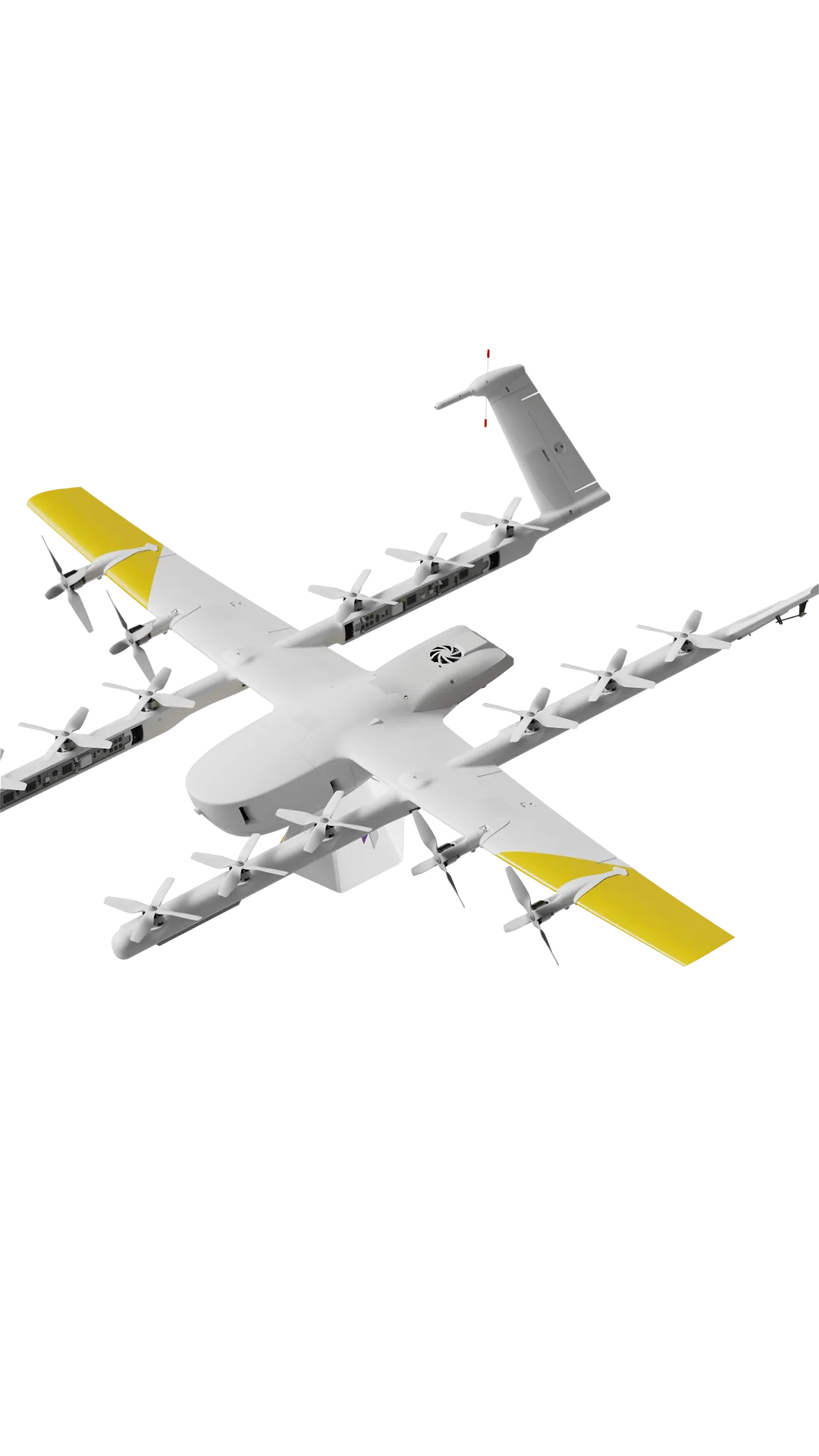
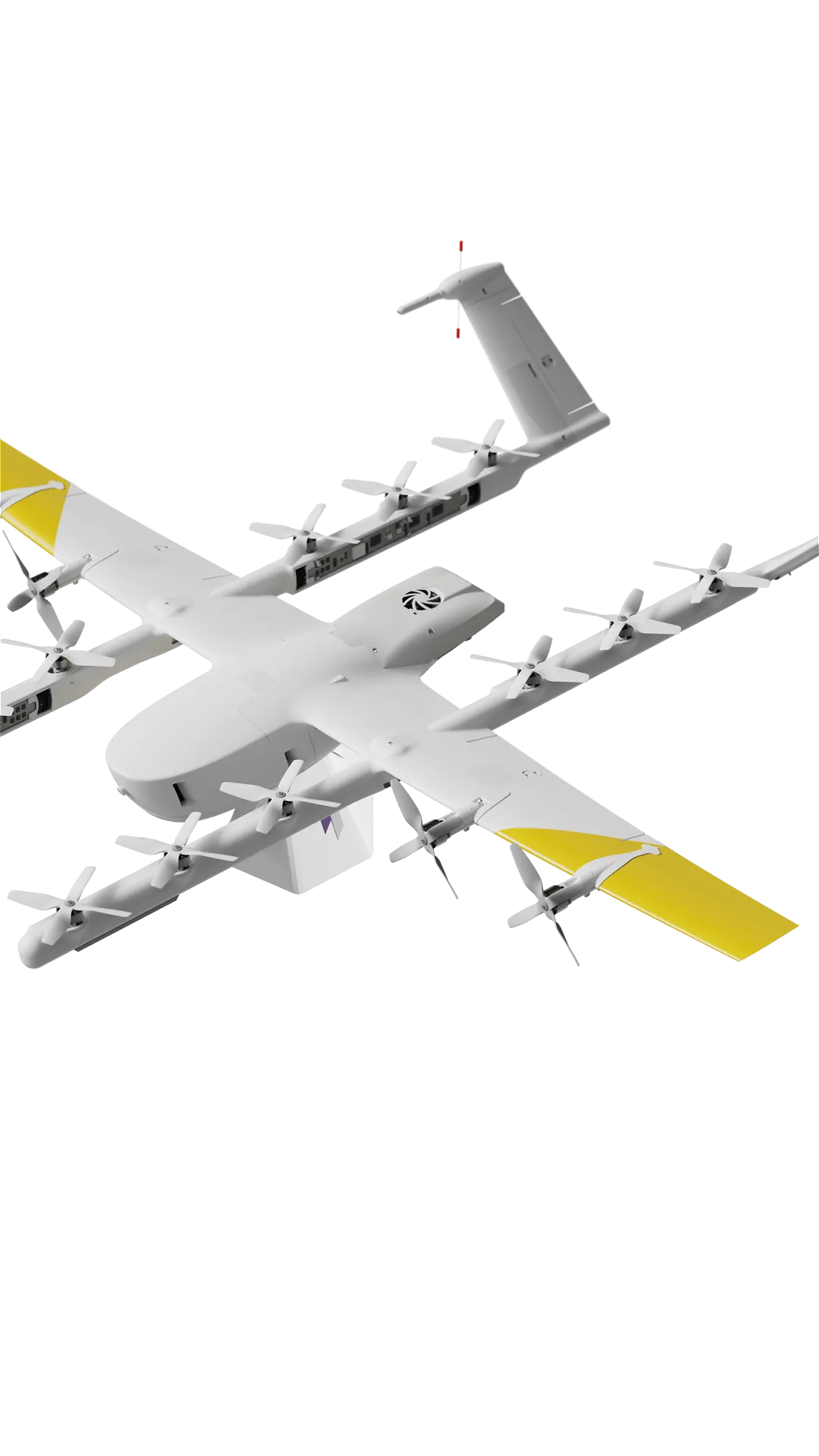
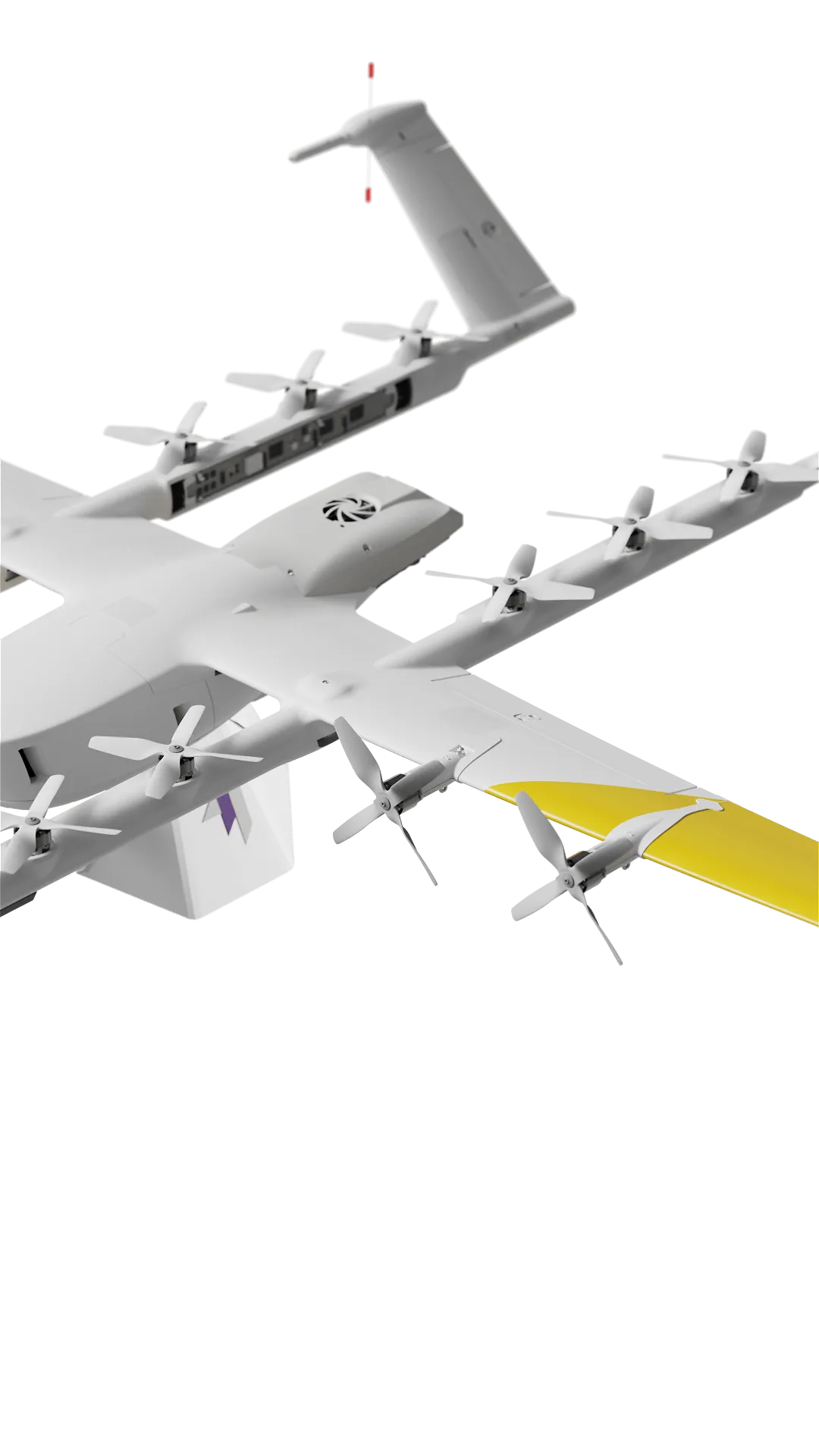
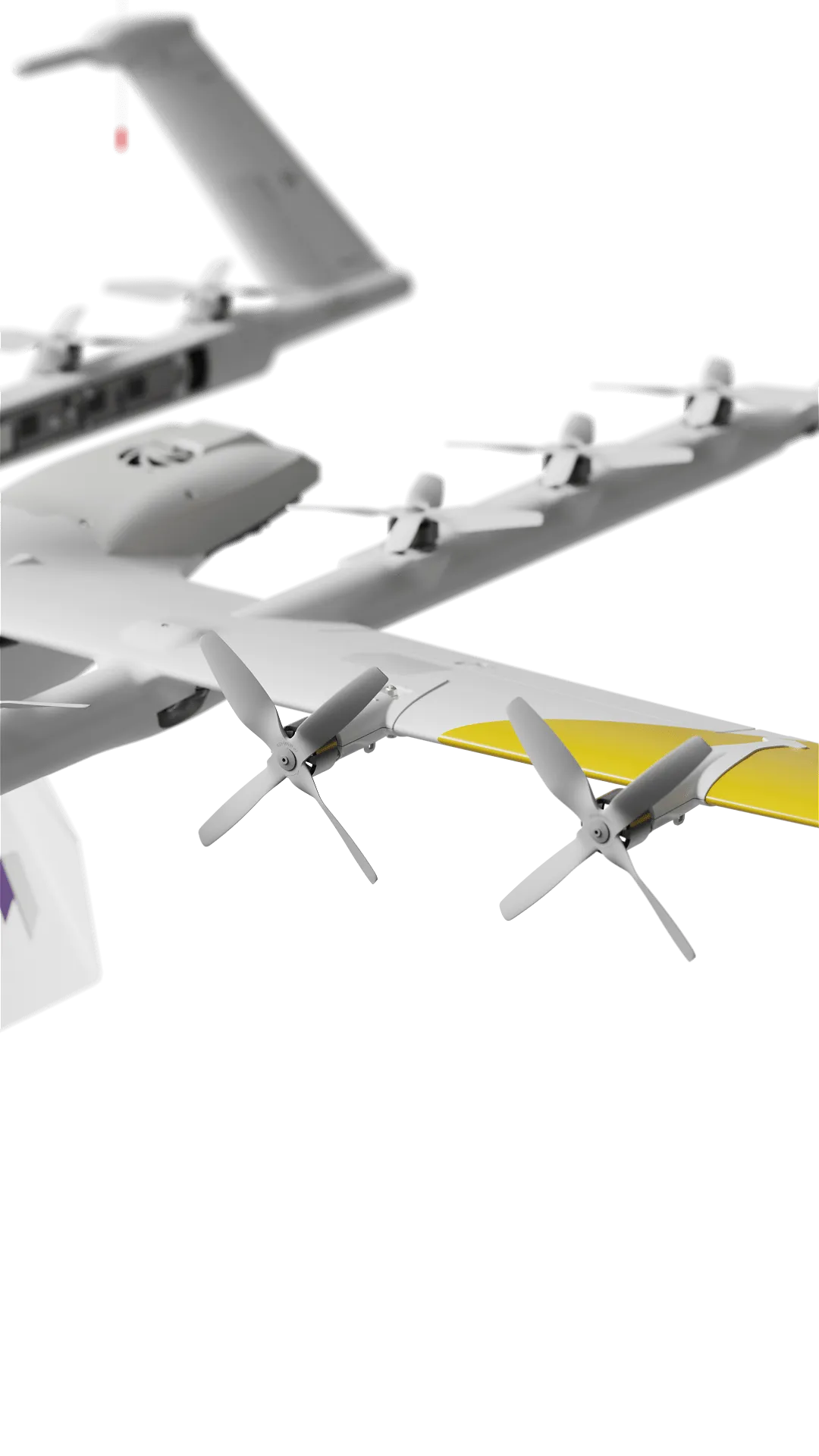
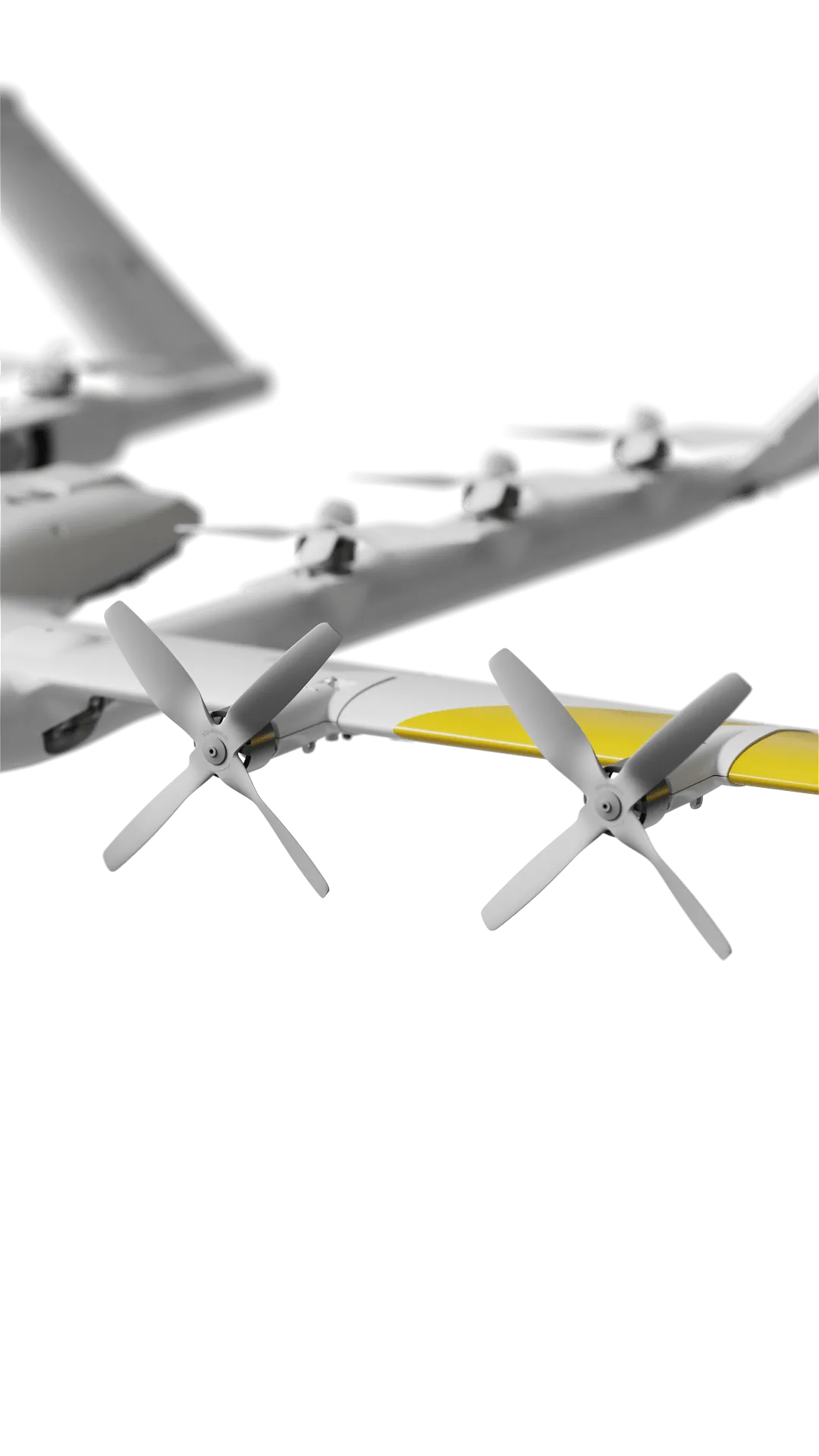
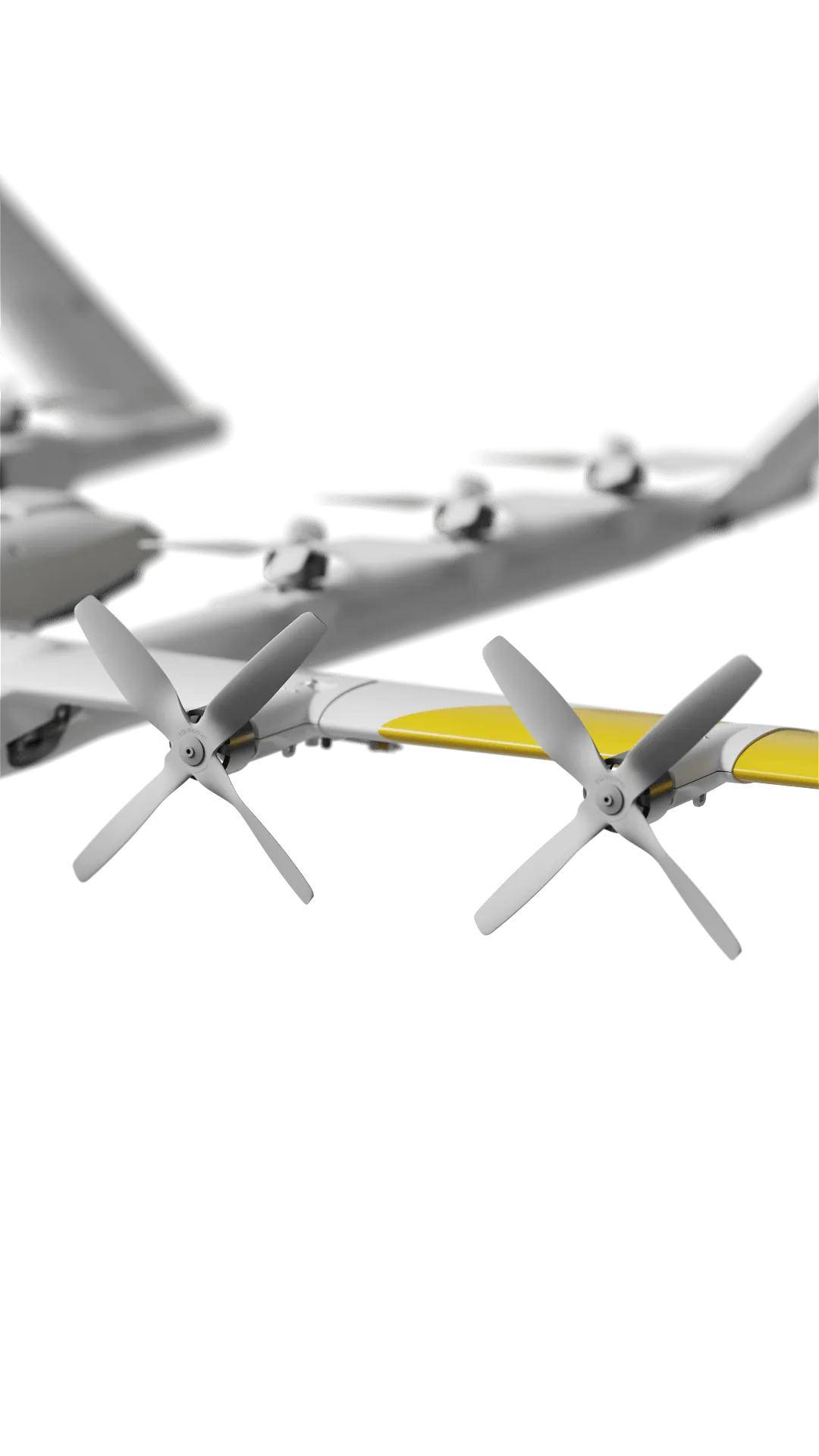
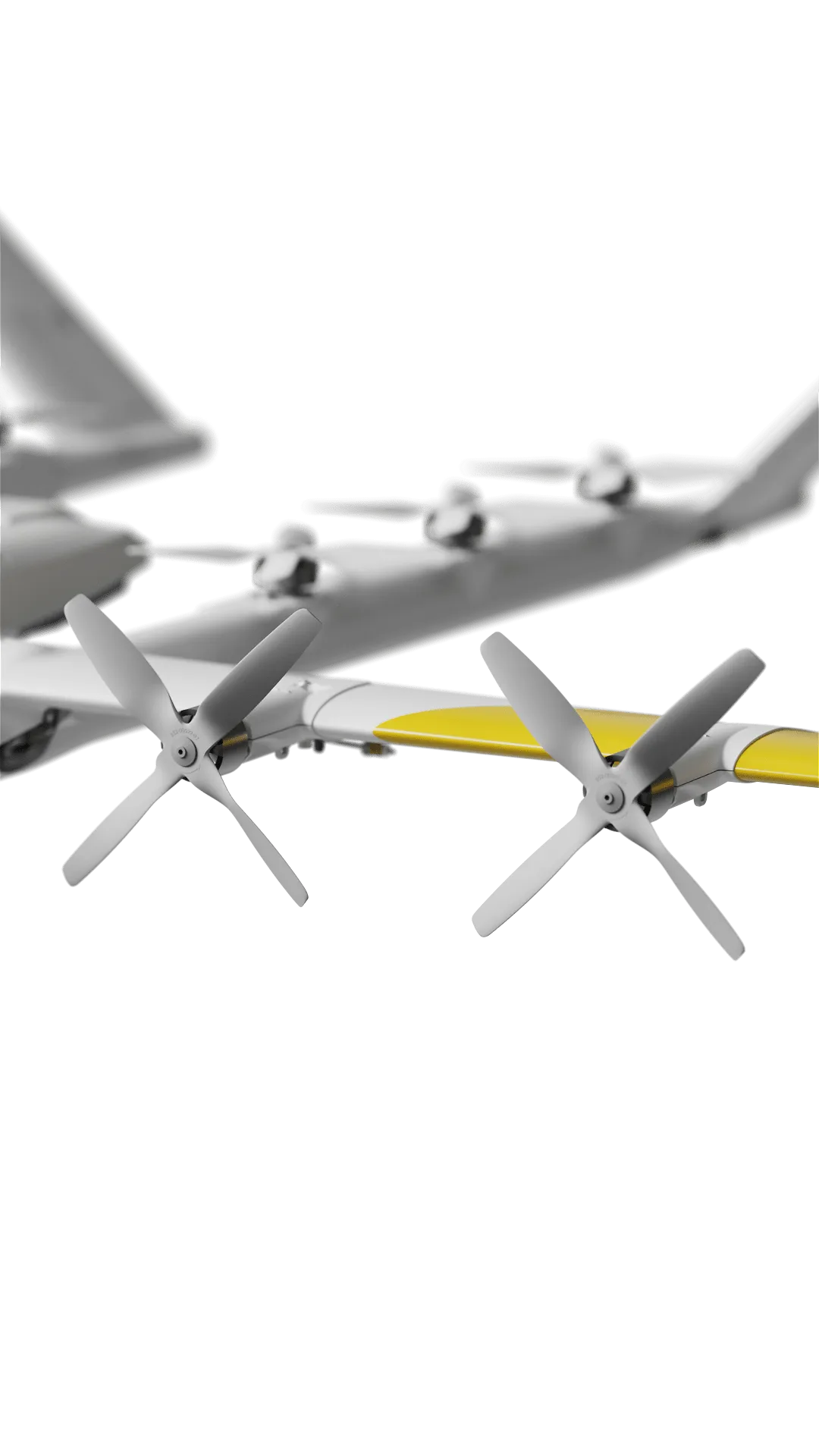
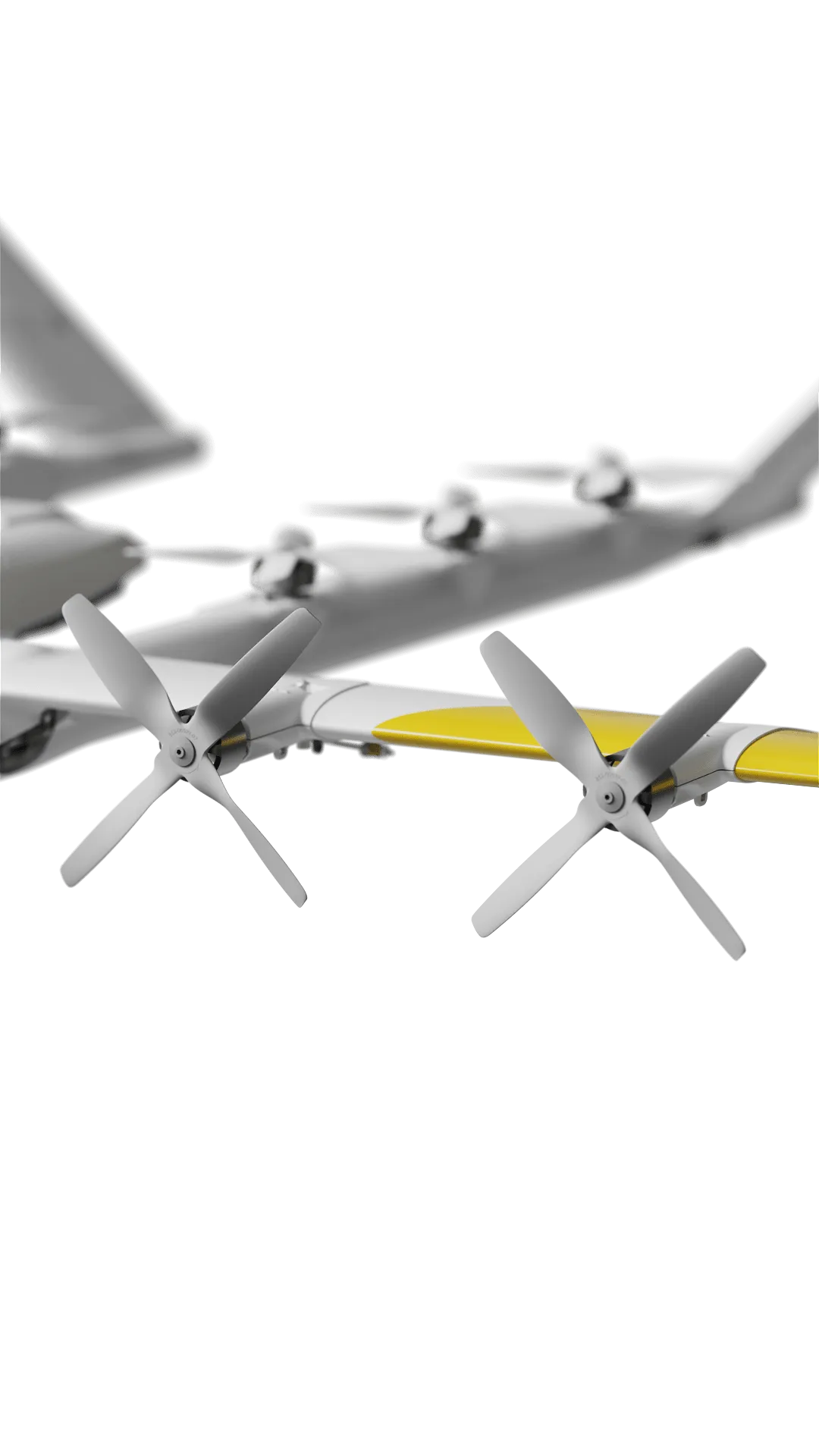
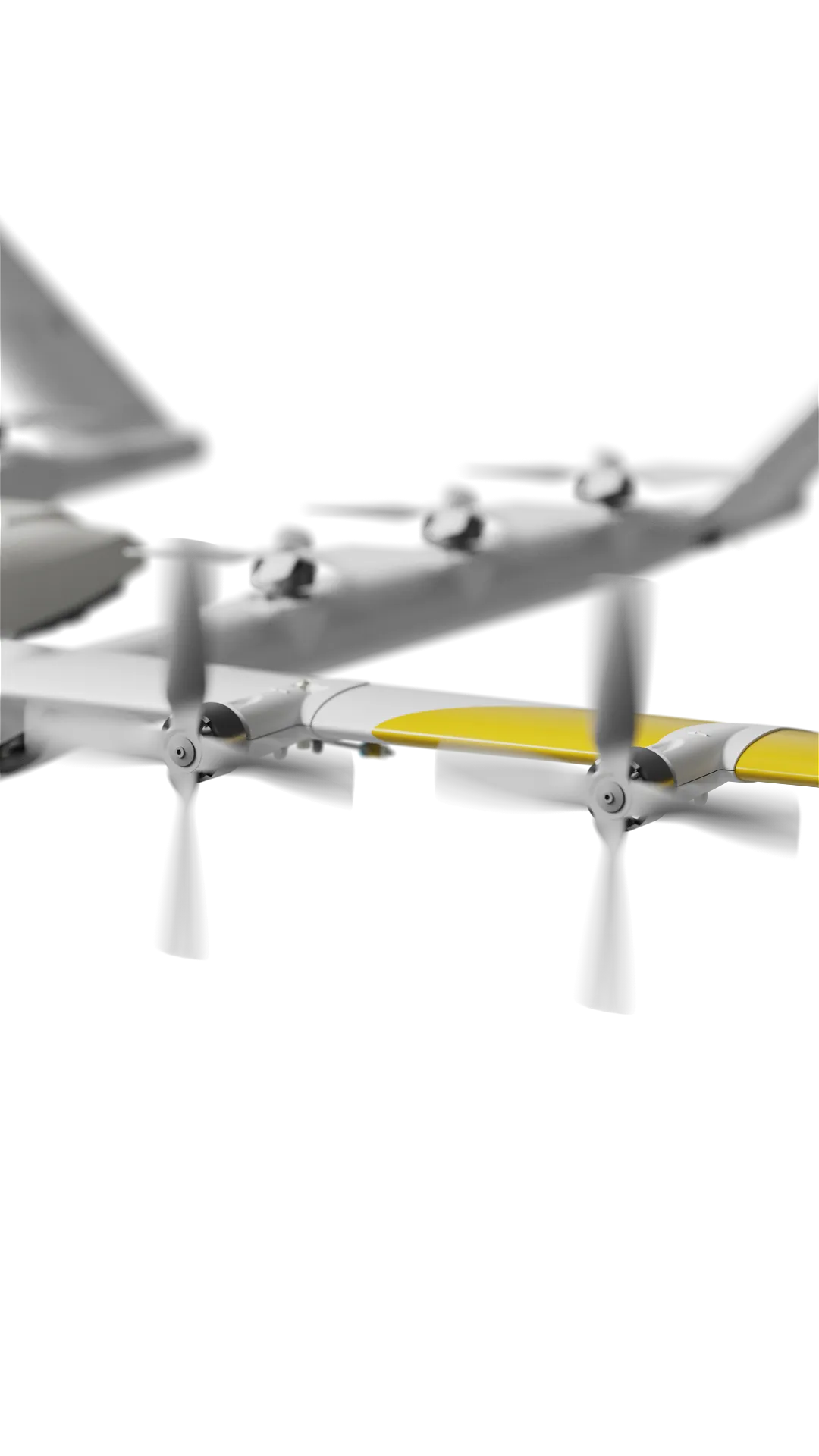
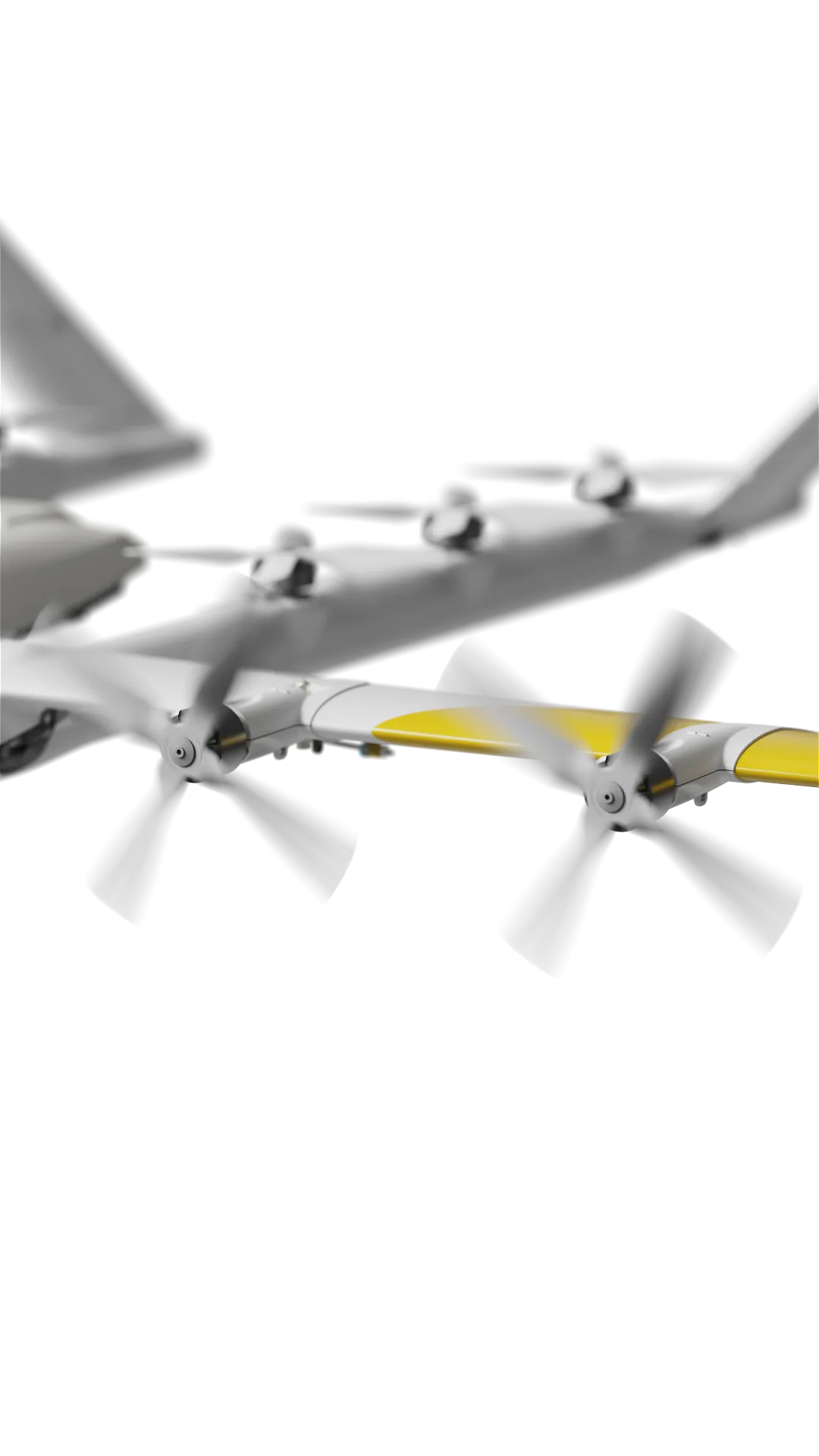
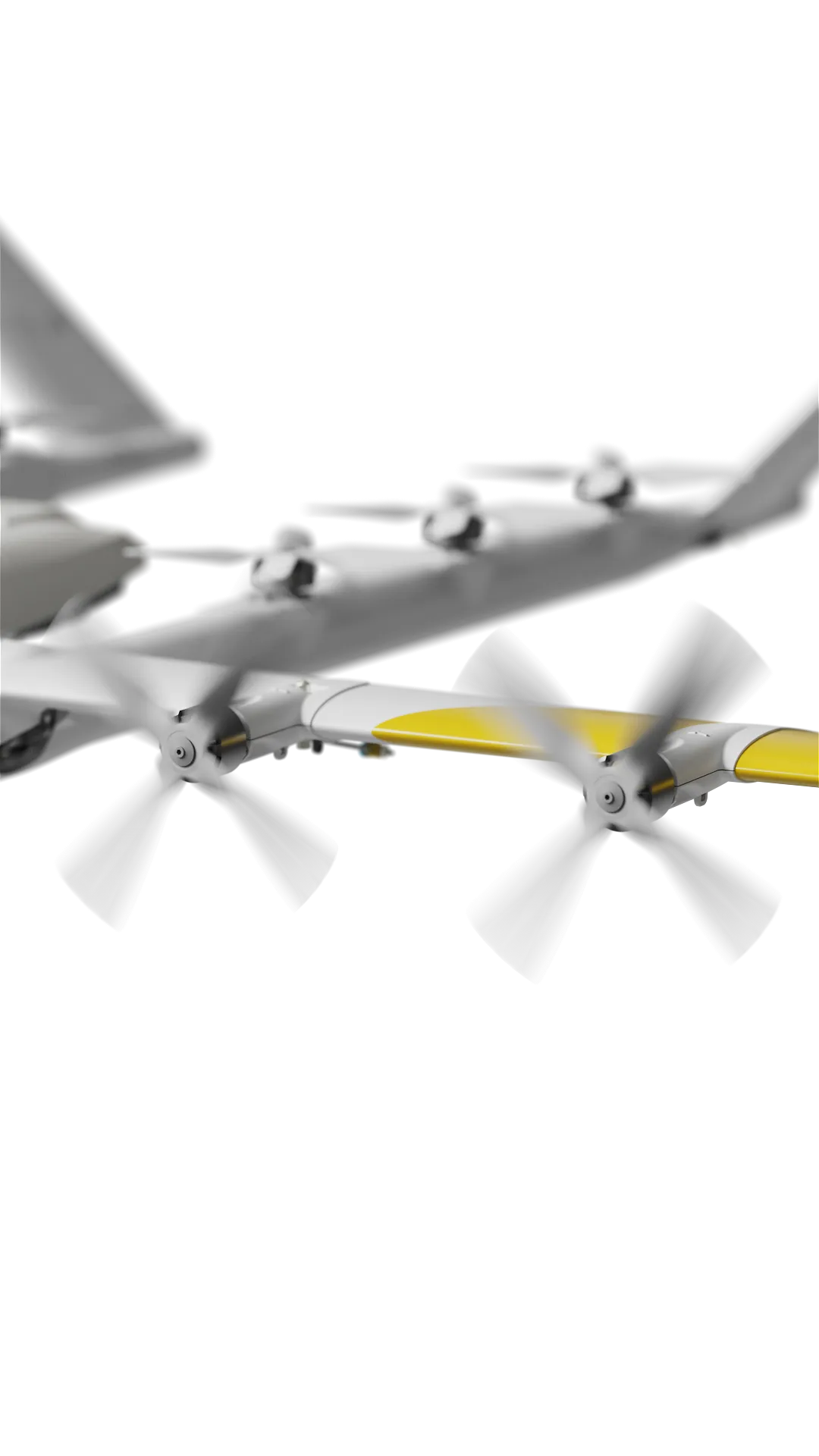
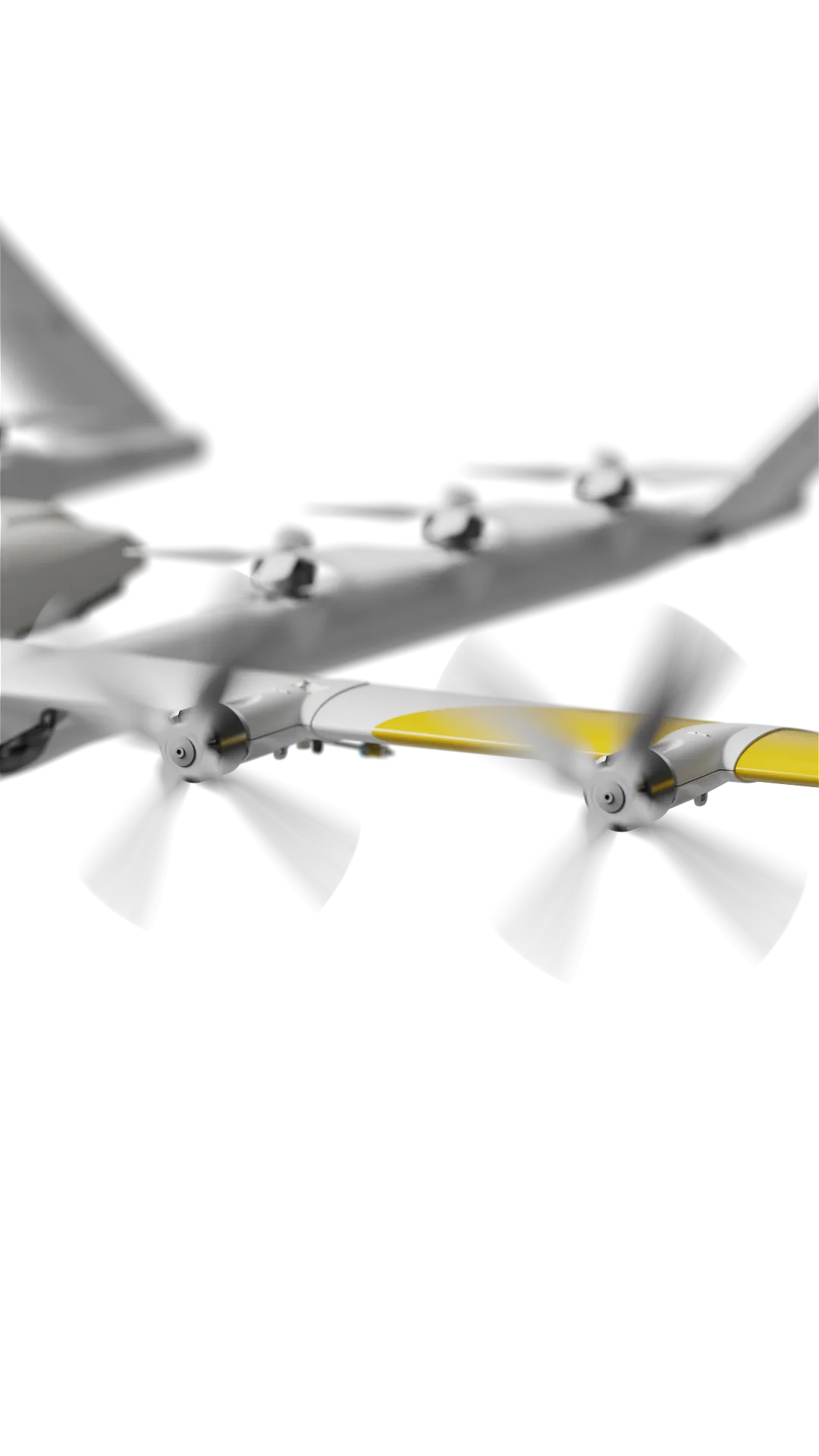
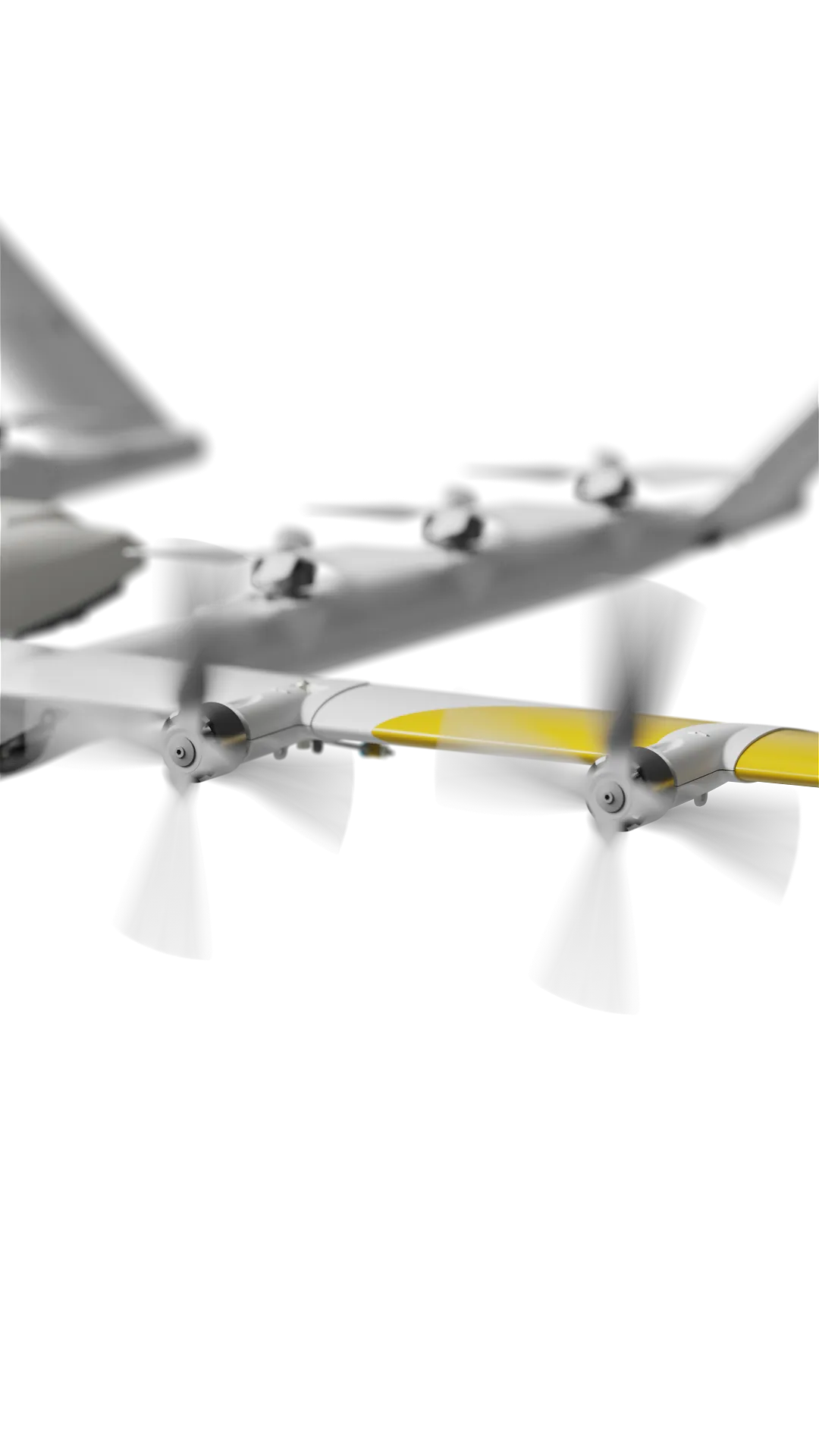
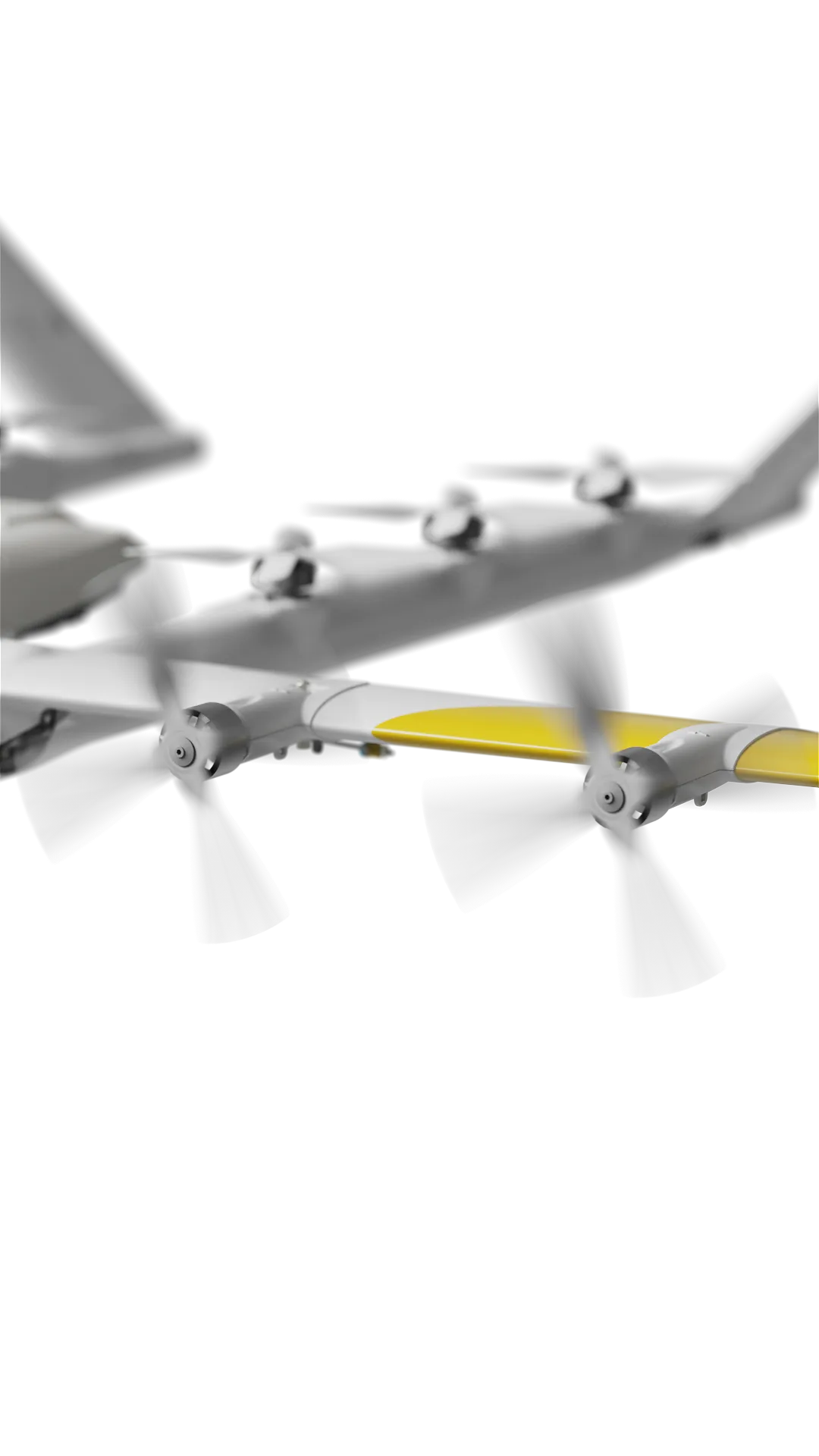
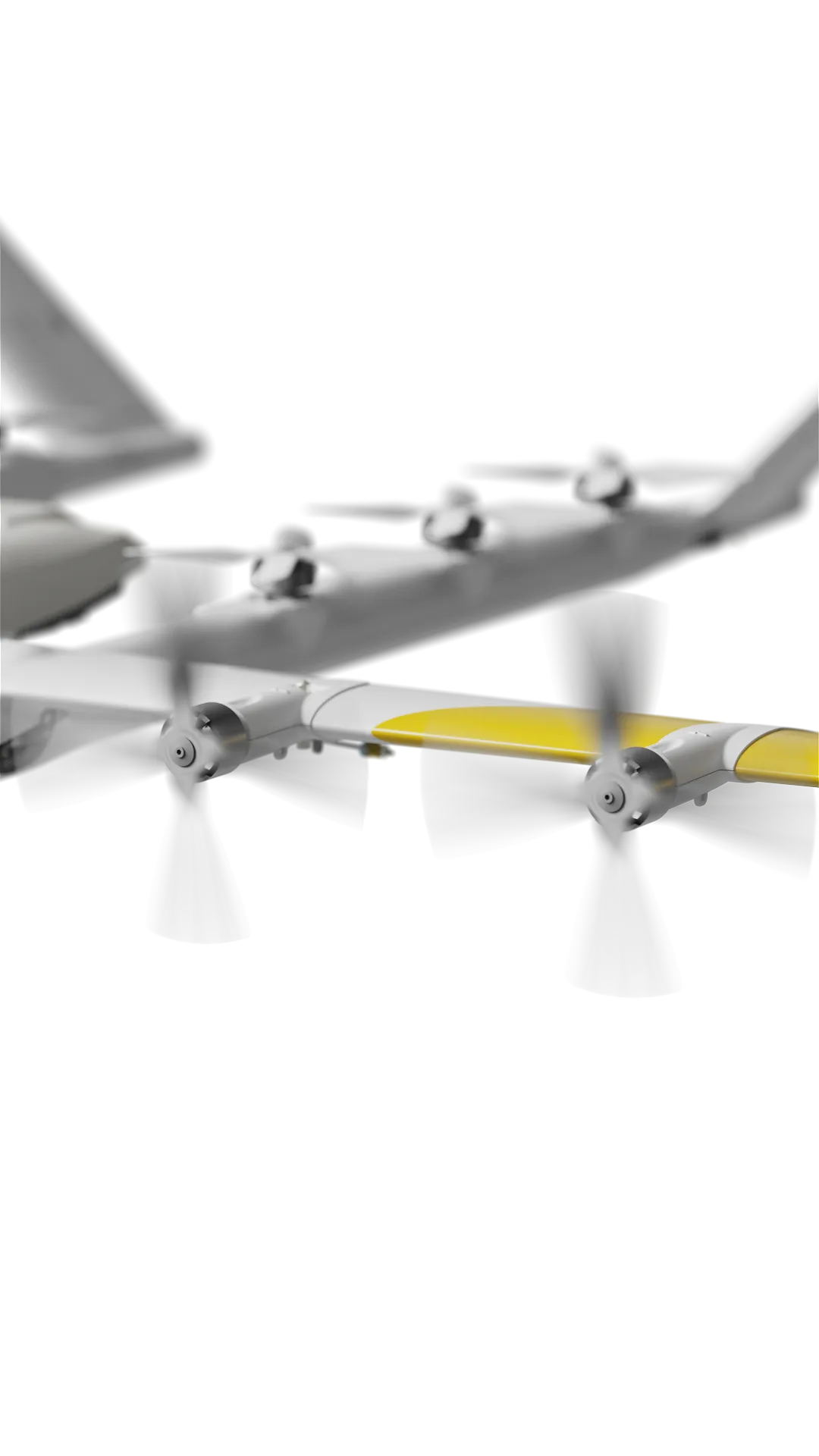
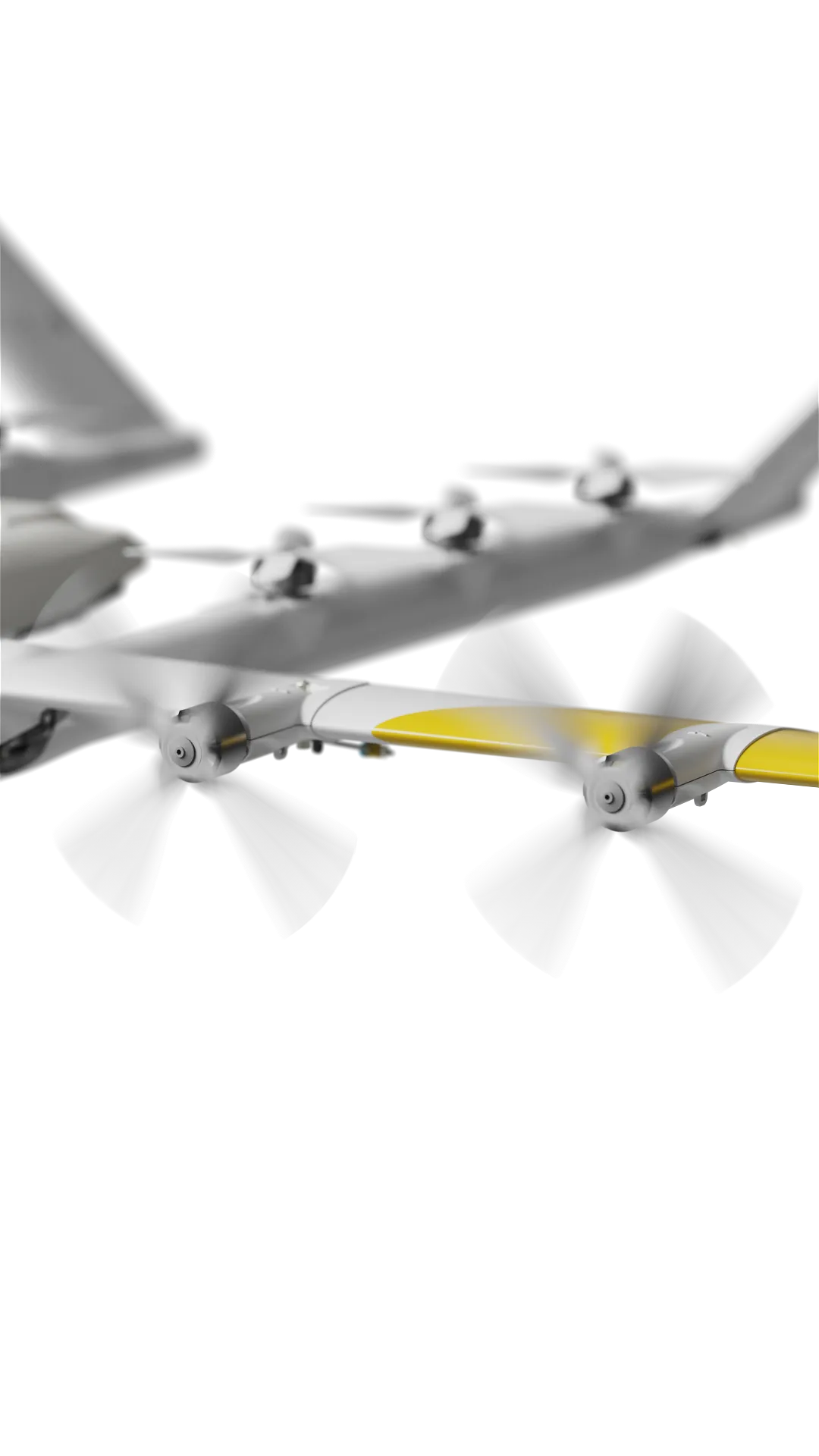
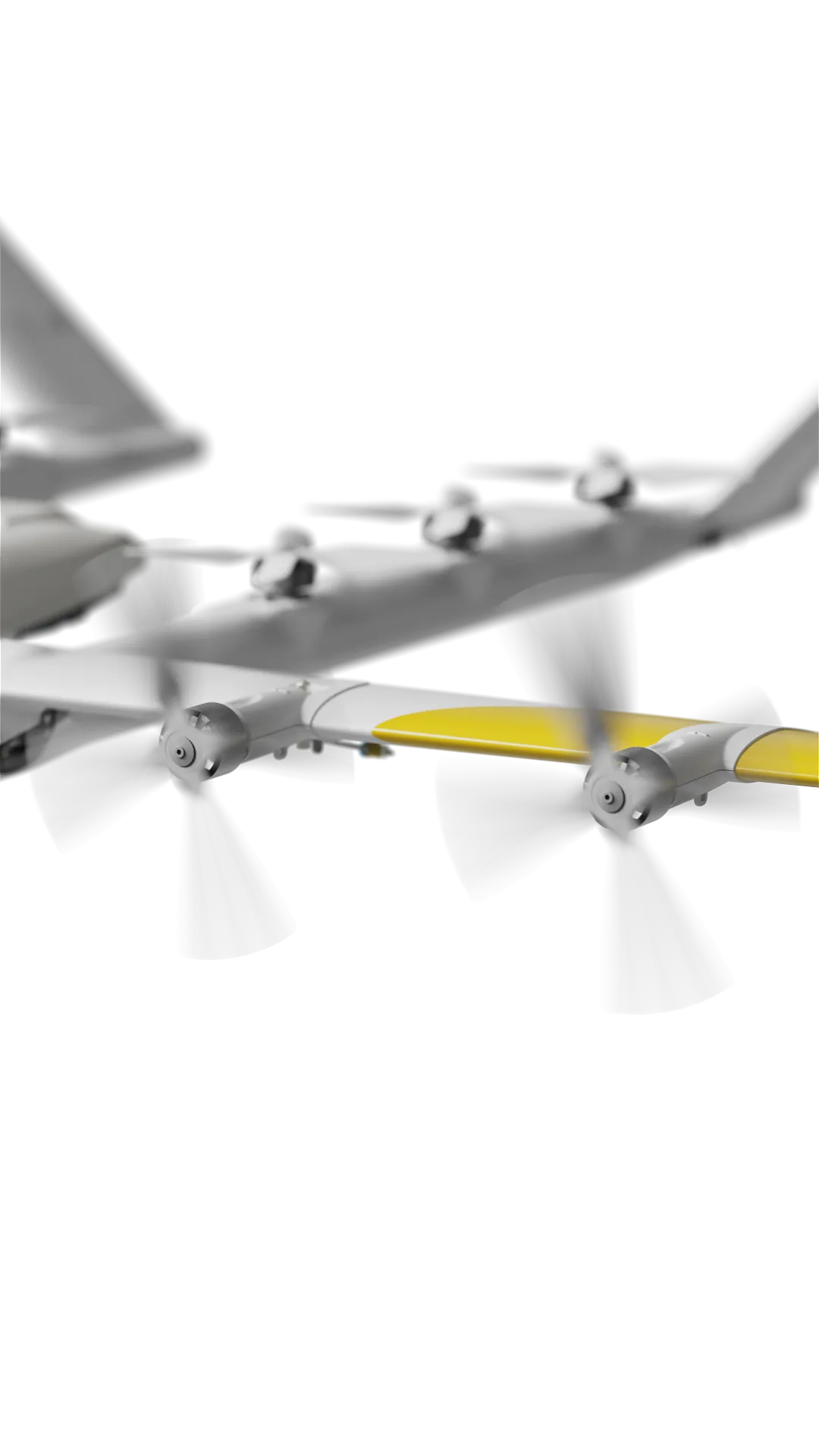
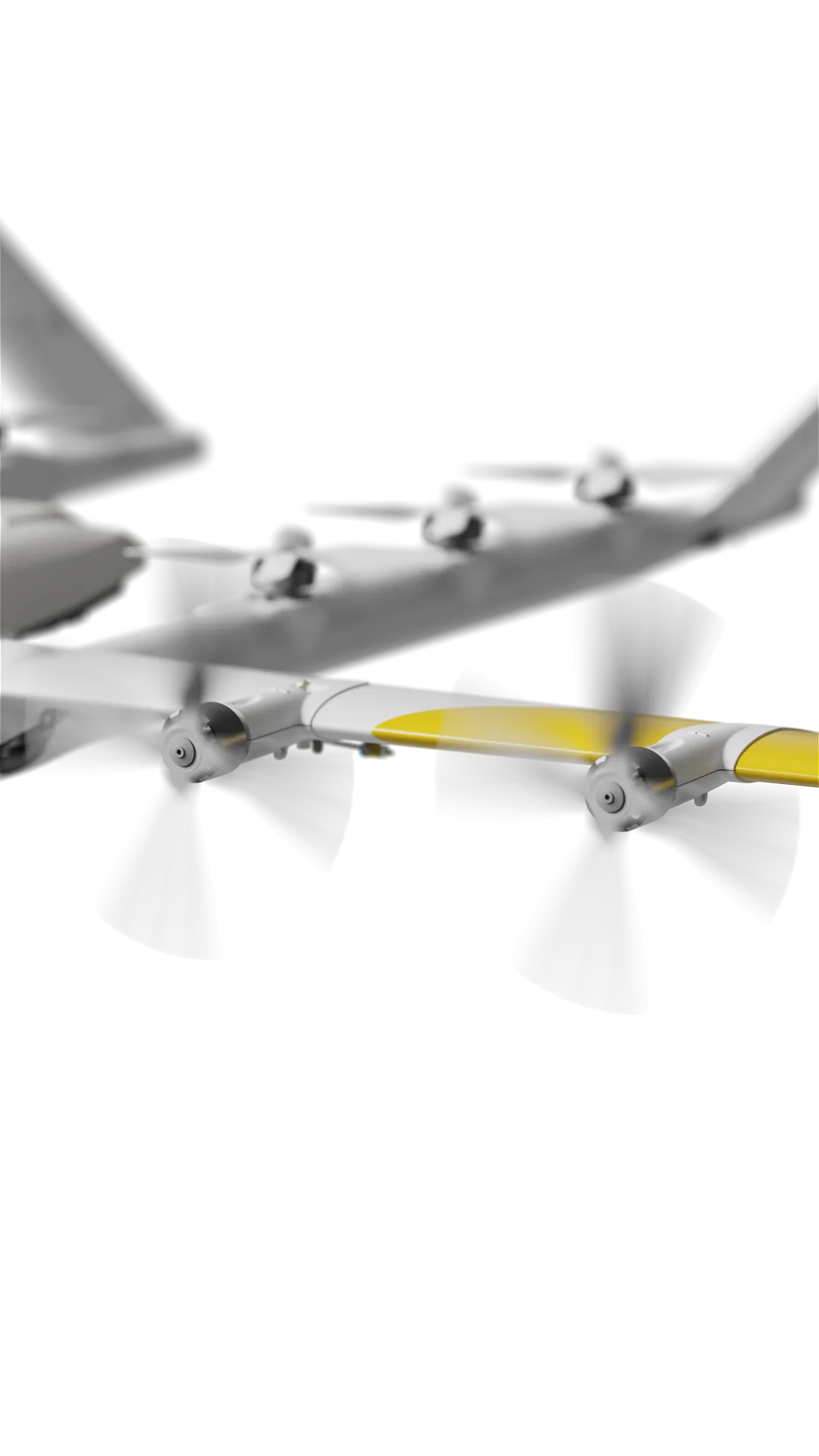
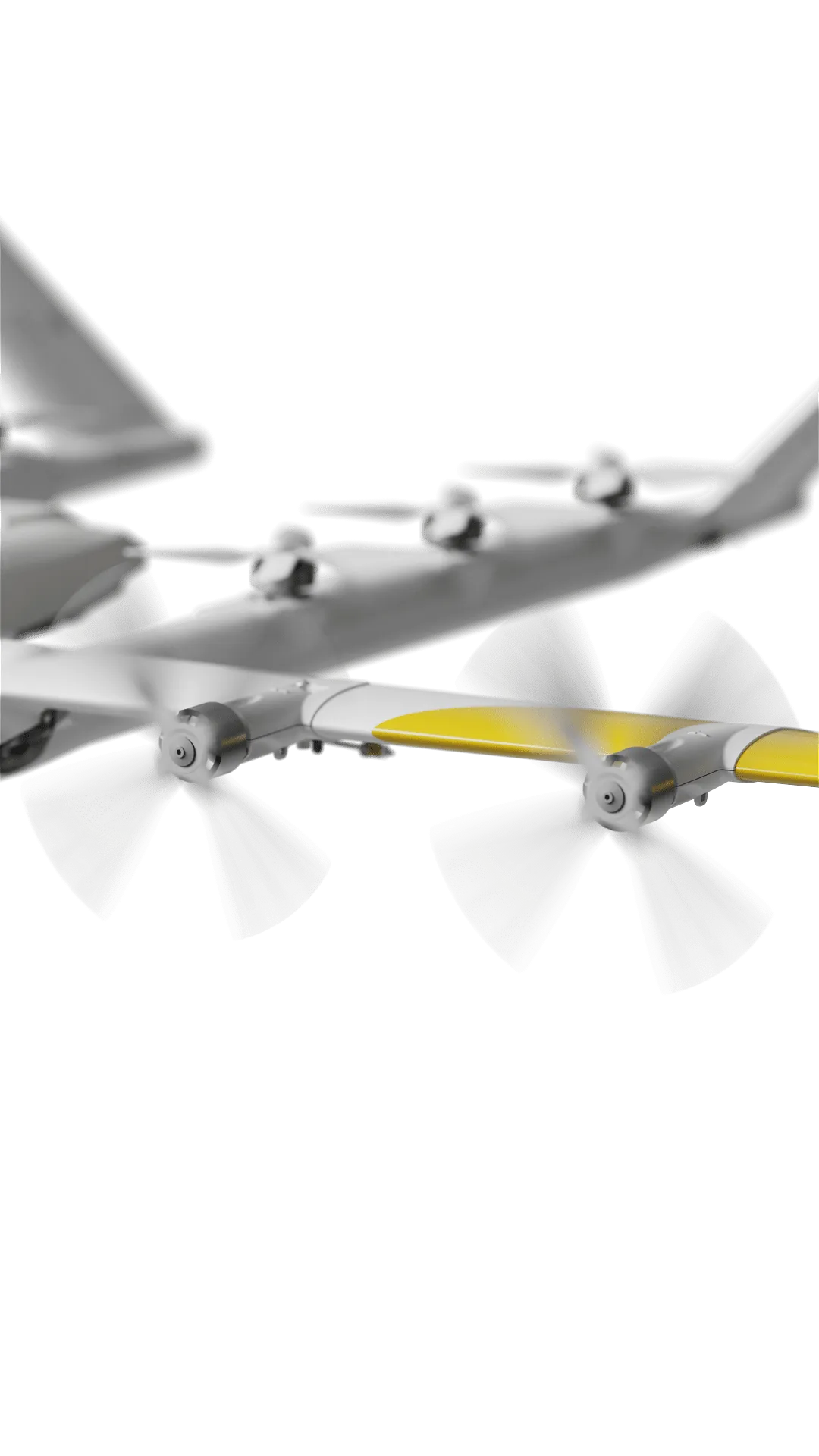
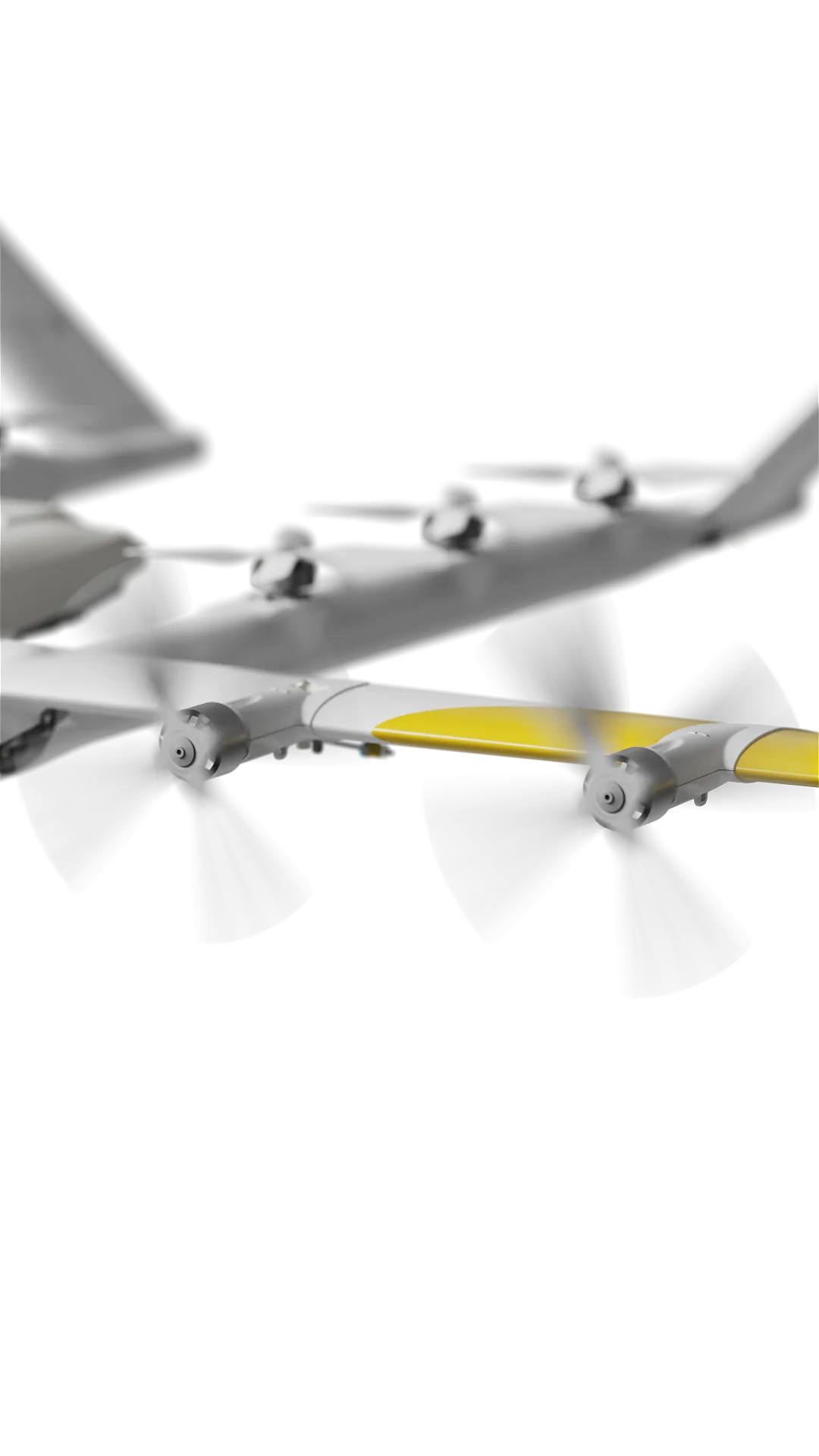
Our drones
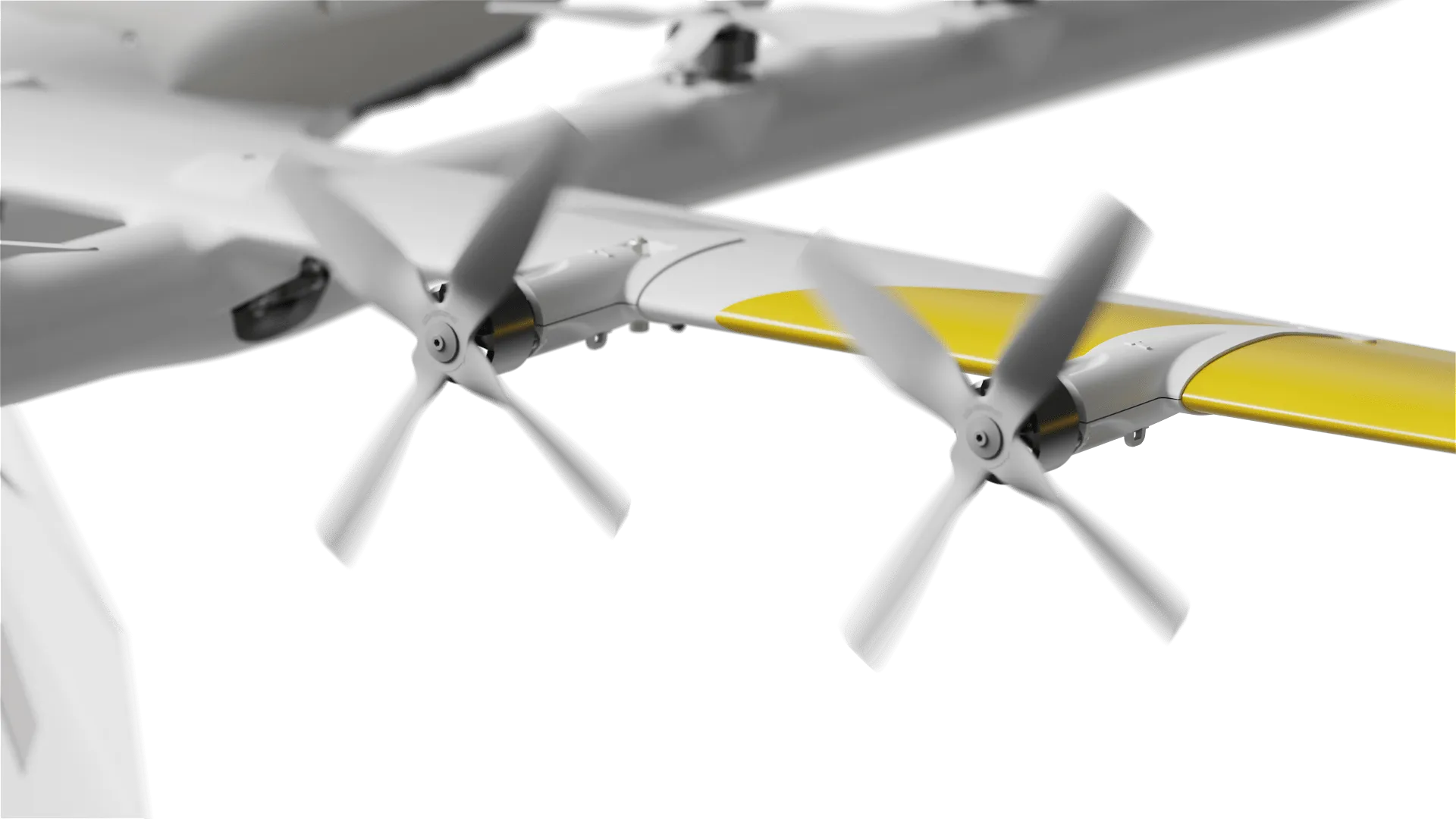
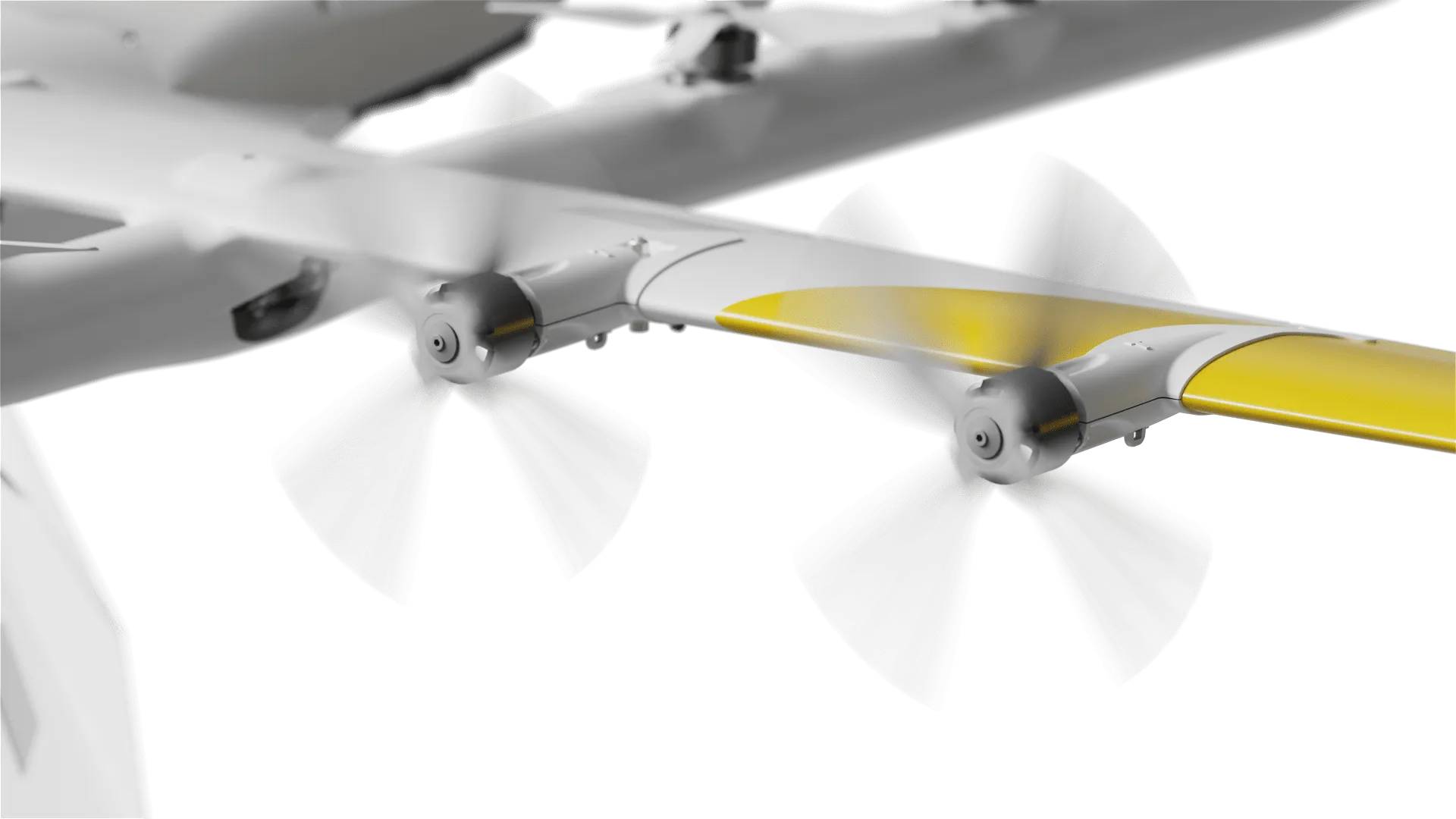
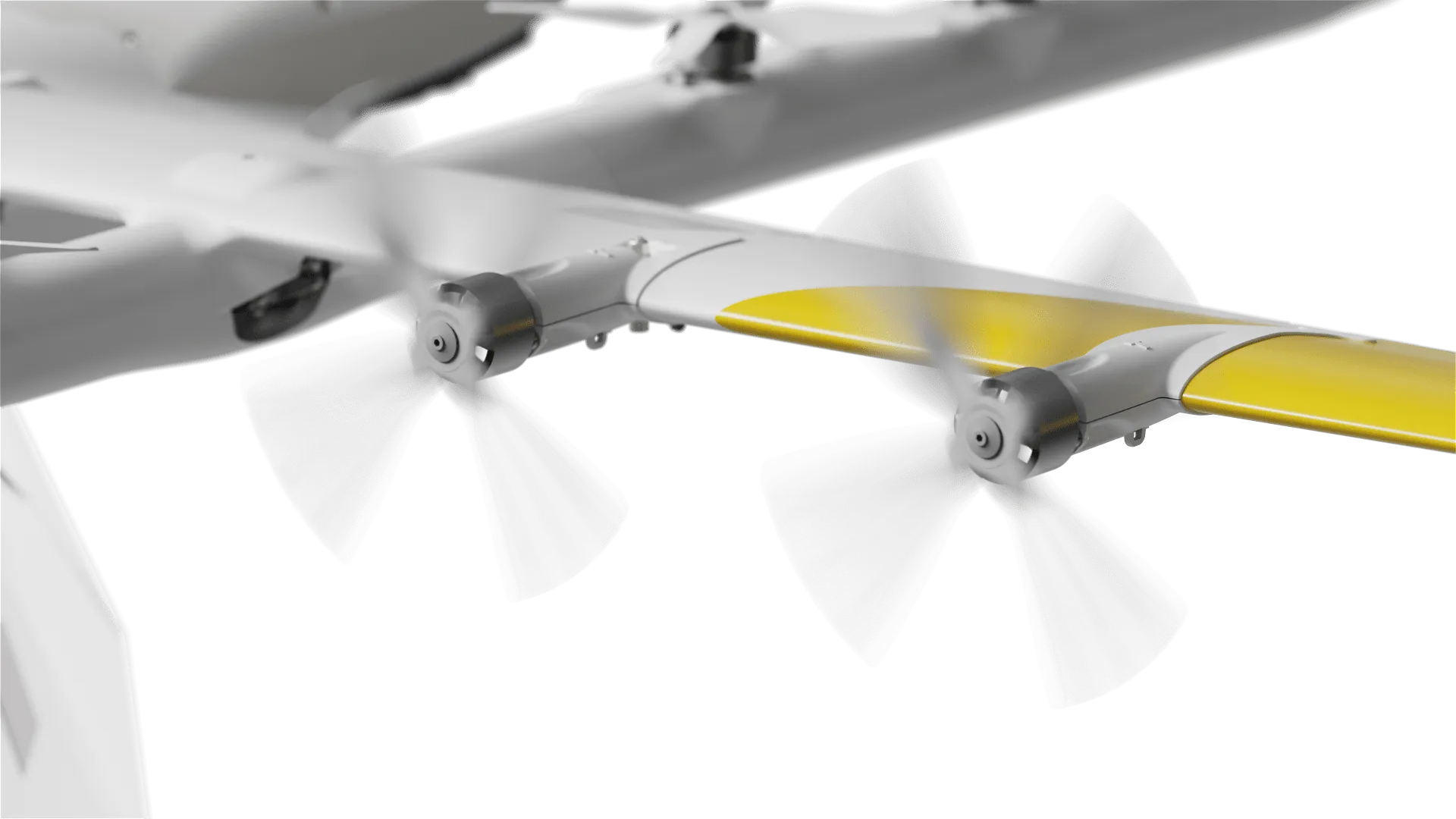
Wing's innovative design uses a unique dual-propulsion system. Vertical lift motors enable precision takeoff, delivery, and landing. Separate cruise motors optimize efficiency for long-range delivery.

































Order experience
Innovation in every delivery.
Order experience
Innovation in every delivery.
Order experience
Innovation in every delivery.
Order experience
Innovation in every delivery.
1:00 PM
1:00 PM
1:00 PM
1:00 PM
1:07 PM
1:07 PM
1:07 PM
1:07 PM
1:11 PM
1:11 PM
1:11 PM
1:11 PM
Our propellers are designed to minimize noise, delivering more quietly than a traditional delivery truck.
Pilots oversee multiple flights from a central location, monitoring weather and air traffic to ensure safety. Individual flights don’t require human control. Instead, pilots oversee the whole system.

Wing delivery drones are built to operate in a wide range of weather conditions, including windy days and moderate rain.
Our propellers are designed to minimize noise, delivering more quietly than a traditional delivery truck.
Pilots oversee multiple flights from a central location, monitoring weather and air traffic to ensure safety. Individual flights don’t require human control. Instead, pilots oversee the whole system.
Wing delivery drones are built to operate in a wide range of weather conditions, including windy days and moderate rain.
1:16 PM
1:16 PM
1:16 PM
1:16 PM
Pioneering the future of delivery.
In 2019, Wing became the first U.S. drone delivery company to receive a Part 135 Air Carrier Certificate, setting the bar for safety standards in the space. In 2022, we were the first to bring drone delivery to a major U.S. metro area in Dallas-Fort Worth. Now, we operate on three continents.
Pioneering the future of delivery.
In 2019, Wing became the first U.S. drone delivery company to receive a Part 135 Air Carrier Certificate, setting the bar for safety standards in the space. In 2022, we were the first to bring drone delivery to a major U.S. metro area in Dallas-Fort Worth. Now, we operate on three continents.
Pioneering the future of delivery.
In 2019, Wing became the first U.S. drone delivery company to receive a Part 135 Air Carrier Certificate, setting the bar for safety standards in the space. In 2022, we were the first to bring drone delivery to a major U.S. metro area in Dallas-Fort Worth. Now, we operate on three continents.
Pioneering the future of delivery.
In 2019, Wing became the first U.S. drone delivery company to receive a Part 135 Air Carrier Certificate, setting the bar for safety standards in the space. In 2022, we were the first to bring drone delivery to a major U.S. metro area in Dallas-Fort Worth. Now, we operate on three continents.
Excellence in automation
From the moment a customer clicks ‘Order,’ our systems are highly automated. From drone selection, route planning, and flights to coordination with other drones, our automation enables efficient logistics and fast, precise deliveries.

Flexible operations
Wing systems fit into existing operations without additional personnel or extensive infrastructure. Our suite of APIs lets businesses seamlessly integrate drone delivery into their operations.

Scaled fleet oversight
With approvals for one pilot to oversee several drones at any point, our system is designed to scale. From small operations to over 1,000 deliveries daily, organizations can customize their Wing setup for a range of use cases and delivery volumes.

Excellence in automation
From the moment a customer clicks ‘Order,’ our systems are highly automated. From drone selection, route planning, and flights to coordination with other drones, our automation enables efficient logistics and fast, precise deliveries.
Flexible operations
Wing systems fit into existing operations without additional personnel or extensive infrastructure. Our suite of APIs lets businesses seamlessly integrate drone delivery into their operations.
Scaled fleet oversight
With approvals for one pilot to oversee several drones at any point, our system is designed to scale. From small operations to over 1,000 deliveries daily, organizations can customize their Wing setup for a range of use cases and delivery volumes.
Excellence in automation
From the moment a customer clicks ‘Order,’ our systems are highly automated. From drone selection, route planning, and flights to coordination with other drones, our automation enables efficient logistics and fast, precise deliveries.
Flexible operations
Wing systems fit into existing operations without additional personnel or extensive infrastructure. Our suite of APIs lets businesses seamlessly integrate drone delivery into their operations.
Scaled fleet oversight
With approvals for one pilot to oversee several drones at any point, our system is designed to scale. From small operations to over 1,000 deliveries daily, organizations can customize their Wing setup for a range of use cases and delivery volumes.
News
Check out the latest from Wing
News
Check out the latest from Wing
News
Check out the latest from Wing
News
Check out the latest from Wing

Ready to let your career soar?
Let’s redefine how the world delivers. Visit our Careers page to explore our open roles.

Ready to let your career soar?
Let’s redefine how the world delivers. Visit our Careers page to explore our open roles.
Ready to let your career soar?
Let’s redefine how the world delivers. Visit our Careers page to explore our open roles.
FAQs
Frequently asked questions
Frequently asked questions
Where can I learn more about Wing’s technology?
Is Wing drone delivery safe?
How loud are the planes?
Where’s the pilot?
How is Wing regulated?
What happens when someone pulls the drone’s tether?
The future of delivery is here. Right on time.
With Wing, delivery’s easy, fast, and fun. Learn more and find out if Wing delivers in your area.
" height="40px" id="YCKud8thh" width="40px"/></svg>)
" width="39px"><path d="M 0 0 L 38.996 0 L 38.996 38.976 L 0 38.976 Z" fill="transparent" height="38.976305134579235px" id="yhhED8uQi" transform="translate(0.002 0.024)" width="38.99562239670638px"/><path d="M 38.998 19.486 C 38.996 9.337 31.203 0.889 21.082 0.065 C 10.962 -0.758 1.903 6.319 0.26 16.334 C -1.384 26.349 4.937 35.948 14.79 38.4 L 14.79 25.441 L 10.769 25.441 L 10.769 19.486 L 14.792 19.486 L 14.792 16.92 C 14.792 10.288 17.795 7.213 24.309 7.213 C 25.544 7.213 27.675 7.455 28.547 7.697 L 28.547 13.094 C 27.798 13.036 27.047 13.012 26.296 13.022 C 23.098 13.022 21.862 14.233 21.862 17.379 L 21.862 19.486 L 28.233 19.486 L 27.137 25.441 L 21.862 25.441 L 21.862 38.831 C 31.517 37.666 39 29.45 39 19.486 Z" fill="rgb(0, 0, 0)" height="38.830710874654024px" id="C0PD1fEMt" width="39px"/><path d="M 16.368 18.229 L 17.464 12.273 L 11.095 12.273 L 11.095 10.167 C 11.095 7.02 12.331 5.81 15.528 5.81 C 16.52 5.81 17.32 5.834 17.78 5.881 L 17.78 0.484 C 16.908 0.242 14.777 0 13.542 0 C 7.025 0 4.023 3.075 4.023 9.707 L 4.023 12.273 L 0 12.273 L 0 18.229 L 4.023 18.229 L 4.023 31.187 C 6.334 31.761 8.731 31.907 11.095 31.618 L 11.095 18.229 L 16.37 18.229 Z" display="none" fill="rgb(255, 255, 255)" height="31.761973155808338px" id="MlRWZV_OM" transform="translate(10.767 6.213)" width="17.779951411719367px"/></g></svg>)
© 2026 Wing. The Wing logo is a trademark of Wing Aviation LLC. Copyright © Wing Aviation LLC. All rights reserved

The future of delivery is here. Right on time.
With Wing, delivery’s easy, fast, and fun. Learn more and find out if Wing delivers in your area.
© 2026 Wing. The Wing logo is a trademark of Wing Aviation LLC. Copyright © Wing Aviation LLC. All rights reserved
The future of delivery is here. Right on time.
With Wing, delivery’s easy, fast, and fun. Learn more and find out if Wing delivers in your area.
© 2026 Wing. The Wing logo is a trademark of Wing Aviation LLC. Copyright © Wing Aviation LLC. All rights reserved
The future of delivery is here. Right on time.
With Wing, delivery’s easy, fast, and fun. Learn more and find out if Wing delivers in your area.
© 2025 Wing.
The Wing logo is a trademark of Wing Aviation LLC. Copyright © Wing Aviation LLC. All rights reserved
